基于小波变换的多旋翼无人机SAR运动补偿方法
本发明属于雷达成像,具体涉及一种基于小波变换的多旋翼无人机sar运动补偿方法。
背景技术:
1、随着uav(unmanned aerial vehicle,无人机)技术的发展进步,各种类型、功能多样的无人机如雨后春笋般涌现而出。微型sar以其体积小、重量轻、功耗低的特点,可以便捷地装载于不同的平台上。但是,不同类型的平台在体积重量、气动外形、动力特点等方面差异巨大,平台运动过程中所表现出的运动特性也各不相同。飞行平台的差异主要体现在航向速度、姿态稳定等方面。因此,微型sar作为载荷装载于不同平台上时,需要结合平台特点及其运动特性进行有针对性的运动补偿和实时成像处理。sar成像过程中,运动误差补偿是实现高分辨sar成像的关键所在,运动补偿法的补偿效果除受传感器测量参数精度影响外,还受到运动误差特性影响,运动误差的幅度越大、频率越高,则补偿越为困难。
2、目前,常规的sar运动补偿的方法有两类:一是基于回波数据的信号处理方法,根据回波本身的性质对运动误差进行补偿,具有自适应处理的能力。二是基于惯导系统的补偿,通过惯导系统测量载机的运动参数进行补偿,效率较高,但是受到惯导系统精度的限制。例如,西安电子科技大学在其申请的专利文献“一种基于惯导系统参数的机载sar运动补偿方法”(公布号cn 113670301 a)中公开了一种机载sar运动补偿方法,该方法用于机载sar运动补偿,通过基于惯导系统参数的运动补偿方法,提高了算法的成像质量。
3、然而,由于多旋翼uav一般具有多对旋翼,每对旋翼的转向相反,从而抵消彼此间的反扭力矩。多旋翼uav平台的航向速度误差幅度最大、频率高,且平动误差的高频分量多,频谱复杂、补偿难度大,通过常规运动补偿技术方法估计高频相位误差是困难的。例如,若将上述专利文献cn113670301a中的方法直接应用于多旋翼无人机sar,会导致成像效果差。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于小波变换的多旋翼无人机sar运动补偿方法。本发明要解决的技术问题通过以下技术方案实现:
2、一种基于小波变换的多旋翼无人机sar运动补偿方法,包括:
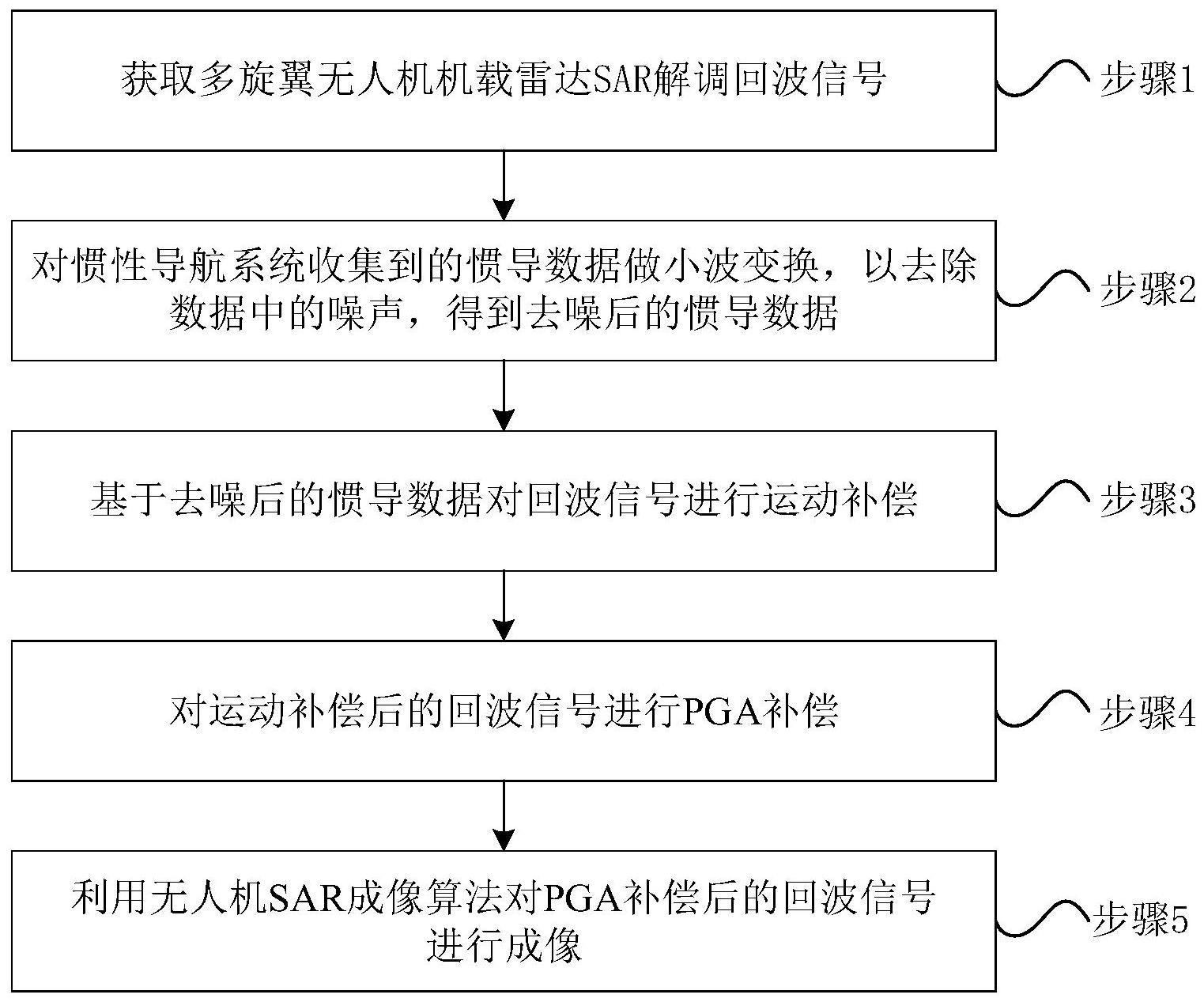
3、步骤1:获取多旋翼无人机机载雷达sar解调回波信号;
4、步骤2:对惯性导航系统收集到的惯导数据做小波变换,以去除数据中的噪声,得到去噪后的惯导数据;
5、步骤3:基于所述去噪后的惯导数据对所述回波信号进行运动补偿;
6、步骤4:对运动补偿后的回波信号进行pga补偿;
7、步骤5:利用无人机sar成像算法对pga补偿后的回波信号进行成像。
8、在本发明的一个实施例中,步骤2包括:
9、2a)基于symlet小波基函数对惯性导航系统收集到的惯导数据进行小波分解,得到各尺度小波系数;
10、2b)基于所述小波系数计算噪声在每个子带内对应的方差,计算公式为:
11、σu,j=median(dj(k))/0.6745
12、其中,σu,j表示噪声在某个子带的方差,dj(k)表示子带内的小波系数,median()表示将子带内的小波系数模按大小排列并取中间;
13、2c)基于所述方差,利用固定阈值估计方法确定噪声在小波域的阈值门限,其计算公式为:
14、
15、其中,λ表示噪声在小波域的阈值,nf表示信号长度;
16、2d)基于所述阈值利用软阈值去噪法对所述小波系数进行过滤,以去除高斯噪声系数;
17、2e)对过滤后的小波系数进行小波重构,得到去噪后的惯导数据。
18、在本发明的一个实施例中,步骤3包括:
19、3a)基于所述去噪后的惯导数据对所述回波信号在距离频域进行包络时延补偿;
20、3b)对包络时延补偿后的回波信号在二维时域进行相位补偿;
21、3c)对包络时延补偿后的回波信号的相位误差按各距离单元进行补偿,得到运动补偿后的回波信号。
22、在本发明的一个实施例中,步骤3a)包括:
23、对运动补偿后的回波信号在距离向做傅里叶变换;
24、根据所述去噪后的惯导数据计算运动误差量;
25、基于所述运动误差量构造滤波器,以对傅里叶变换后的信号进行包络时延补偿;其中,所述滤波器的表达式如下:
26、
27、其中,fr表示距离频率,δr表示运动误差量,c表示光速。
28、在本发明的一个实施例中,步骤3b)包括:
29、对包络时延补偿后的回波信号做逆傅里叶变换,得到二维时域信号;
30、基于所述运动误差量构建相位补偿函数,以对所述二维时域信号进行相位补偿;其中,所述相位补偿函数为:
31、
32、其中,c表示光速,λ为波长,δr表示运动误差量。
33、在本发明的一个实施例中,步骤4包括:
34、4a)将运动补偿后的回波信号的残余相位误差展开为距离的二阶多项式,其表达式为:
35、φ(η,rb)=b0(η)+b1(η)δr+b2(η)δr2
36、其中,η表示方位慢时间,δr表示场景中其他目标点的斜距与场景中心斜距的差值,b0,b1,b2分别表示相位误差的常数项、一次项系数、二次项系数;
37、4b)将经过运动补偿的数据分为d个距离块,对每个距离块内的多个距离样本进行相干叠加来估计残余相位误差其表达式如下:
38、
39、其中,arg为取相位函数,j为距离样本数,h=1,2,…,j为任意一个方位位置,d=1,2,…,d为距离块位置,md,j为第d距离块中第j样本单元sd(j,:)对应的信杂比权值,conj为取共轭操作;
40、4c)计算每个距离块对应的δr;
41、4d)基于步骤4c)计算的δr构造距离空变矩阵ab、相位梯度估计φ以及信杂比加权矩阵w;
42、4e)根据所述距离空变矩阵ab、相位梯度估计φ以及信杂比加权矩阵w计算距离空变多项式的相位梯度最小二乘估计,计算公式为:
43、
44、其中,t为转置操作,()-1为矩阵的求逆运算;
45、4f)根据所述相位梯度最小二乘估计公式估计积分得到b0,b1,b2,并根据样本对应的距离单元计算空变的残余相位误差并对该残余相位误差进行补偿处理,以实现pga补偿。
46、本发明的有益效果:
47、1、本发明提供的基于小波变换的多旋翼无人机sar运动补偿方法首先采用小波变换对惯导数据进行处理,可以自动适应时频信号分析的要求,从而可聚焦到信号的任意细节;然后利用pga算法来补偿运动误差,能够估计任意阶的相位误差。通过以上两步运动补偿方法,可以解决多旋翼uav平台的航向速度误差幅度最大、频率高,且平动误差的高频分量多,频谱复杂、补偿难度大的问题,能够高效估计多旋翼uav平台的高频运动误差,从而实现多旋翼无人机sar的精准成像;
48、2、本发明在多旋翼无人机sar成像中,提出了基于数据的相位估计方法,利用相位梯度自聚焦算法估计运动参数,补偿残余相位误差,补偿精度更高,满足实际工程分辨率的要求,成像效果更好。
49、以下将结合附图及实施例对本发明做进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!