合成基线水声定位系统参数全局灵敏度分析方法
本发明属于无人潜行器水下定位,涉及定量分析水下无人潜行器定位计算算法输入参数误差对多关节潜器定位精度影响的方法。
背景技术:
1、多关节潜器(multi-joint autonomous underwater vehicle,mauv)是一种能够实现在垂直方向上灵活折返和转向的深海潜器。在作业过程中,mauv各舱段间的相对转动会导致首尾舱段搭载的水听器所形成的基线长度发生变化,需要借助适合求取可变基线的长度的合成基线定位系统对其进行精确定位。受环境和测量误差影响,输入合成基线定位系统的参数往往伴随着各种随机误差,这些随机误差会降低定位系统的定位精度。
2、灵敏度分析可以定性和定量分析定位计算模型的输入参数对其输出的影响,是模型构建、评估和优化的重要环节。灵敏度分析可分为局部灵敏度分析和全局灵敏度分析两类。目前,对于水声定位系统的误差分析基本都是基于局部灵敏度的分析。局部灵敏度分析方法只能单独分析系统的某个参数,并且只能分析输入参数在某一位置对定位结果的影响;为了了解各参数对不同位置的影响,需要进行大量的计算。此外,局部灵敏度分析只能评估单个参数对模型输出的影响,而不能评估参数之间相互作用的影响,对于非线性多参数系统的分析局限性较大;全局灵敏度分析则是在整个参数空间中分析多个参数对模型输出的共同影响并分析参数间的相互作用,较适用于复杂非线性多参数系统的研究与分析。
技术实现思路
1、本发明为解决多关节潜器水声定位系统受水下复杂环境影响,仪器测量数据会产生一定的误差导致定位精度受到影响需要提供优化方案的问题,提出了一种基于sobol全局灵敏度的直观、方便的测量输入参数的误差对定位精度影响的灵敏度测量方法。
2、本发明综合考虑合成基线定位算法中各类参数误差分布情况,在参数取值范围内利用分层抽样技术采样,基于方差分解的sobol方法对研究区内的模型参数的灵敏度进行定量分析,计算各参数对模型输出结果方差的影响,具体评估各参数的灵敏度,为之后的模型参数校核以及模型优化提供支持。
3、本方法的实施按以下步骤进行:
4、步骤s1.合成基线水声定位系统参数全局灵敏度分析方法,其特征在于:包含如下步骤:
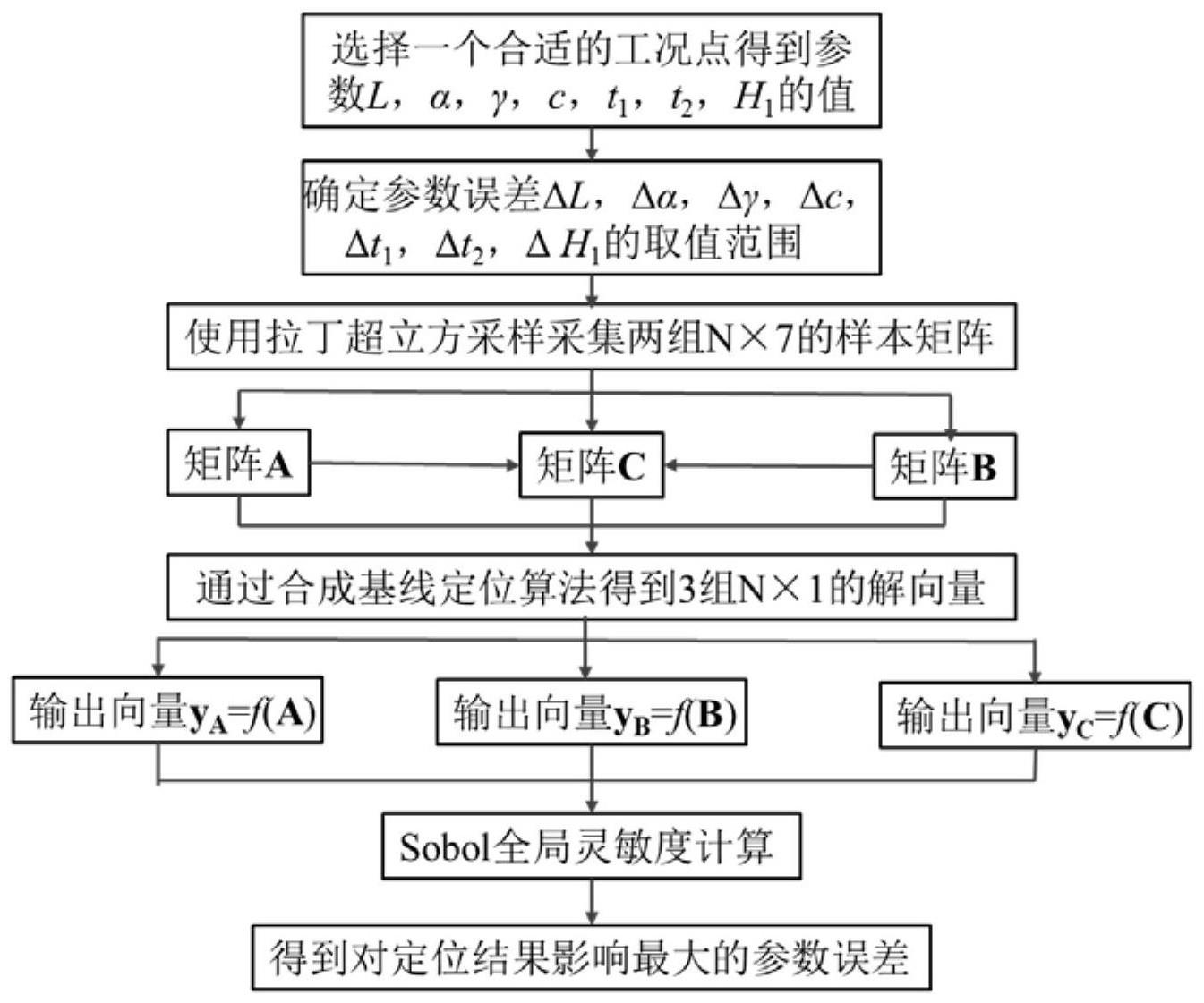
5、s1.确定合成基线定位算法输入参数波动范围,通过取值范围进行采样;根据潜器传感器的规格确定输入参数的波动范围,该波动范围可以是参数误差的小范围,也可以是该参数的整个定义域范围,根据参数误差发生的概率分布利用拉丁超立方法进行采样。
6、s2.根据采样值得到采样矩阵;将s1中得到的采样值组合成3个采样矩阵;样本均分为两组,分别记为矩阵a、b;构造矩阵ci,矩阵ci由b中除了第i列的其他列组成,第i列来自a中的第i列。
7、s3.根据样本矩阵带入合成基线定位算法得到输出向量;将采样矩阵中的值作为的输入参数带入合成基线定位算法,计算得到三组输出向量。
8、s4.计算全局灵敏度;根据s3中计算得到的输出向量计算全局灵敏度,得到一阶灵敏度系数和总阶灵敏度系数;一阶灵敏度系数代表单个参数对定位结果精度的主要影响;总阶灵敏度代表该参数对定位结果精度产生的总影响,总影响包括主要影响和该参数的交互影响。
9、s5.按照灵敏度系数大小的进行排序,得到参数误差的重要性顺序,对于参数误差影响较大的参数应着重改善其输入的精度,由此来改善定位结果。
10、进一步,步骤s1具体包括:设定大地全局坐标系p(oxyz),潜标的位置为r0=(x0,y0,z0),将mauv上的头部水听器与尾部水听器的连线称为基线l。α为基线的俯仰角,朝上为正,α∈[-π/2,π/2];γ定义为基线的航向角,基线在水平面上的投影沿x正方向时为0°,向y正方向偏为正,且γ∈[-π,π]。这些数据可以根据,干仓中陀螺仪输出的mauv第二节干仓的俯仰角,航向角,翻滚角,以及第一节和第三节相对与第二节的俯仰角与横摇角计算得到。头部水听器到潜标深度的距离为h1,该数据由深度计可以得出。c为信号从潜标到水听器阵列的有效声速,根据实际声速剖面而定。t1、t2分别为头部水听器、尾部水听器接收到潜标信号的时延信息。根据有效声速和时延,可得斜距r1、r2。
11、由上述原理,可以列出以下式子
12、
13、对(1)进行求解,可得头部水听器和尾部水听器x-y水平面的解,其解的形式如下:
14、
15、通过水听器解可得到合成基线定位算法的误差源。误差源包括声速误差dc,时延误差dt1和dt2,基线长度误差dl,基线俯仰角误差dα,基线航向角误差dγ和水听器1与信标之间的深度差误差(深度计误差)dh1。根据现有仪器指标确定参数误差范围,假设每个参数误差服从正态分布,均值为0,标准差为误差上限的1/3。用拉丁超立方采样对各参数误差在参数误差范围内采样n次。
16、进一步,步骤s2具体包括:
17、当所有的随机输入变量采样结束后,把每个随机变量的采样值随机排列为矩阵的一行,则所有的采样值形成一个2n×7阶的采样矩阵,将该矩阵分为两部分,前n行组成采样矩阵a,后n行组成采样矩阵b。
18、
19、
20、定义一个矩阵c,当计算第i个参数误差的灵敏度时,矩阵c由b中除了第i列的其他列组成,第i列来自a中的第i列,例如当我们计算δt1的全局灵敏度时:
21、
22、现以合成基线算法的输入参数误差对定位结果x的全局灵敏度计算为例,式(6)和式(7)分别为定位结果的精确解和实际解:
23、x=f1(t1,t2,c,l,α,γ,h1) (6)
24、x'=f1(t1',t2',c',l',α',γ',h1') (7)
25、其中:l'=l+δl,α'=α+δα,γ'=γ+δγ,c'=c+δc,t1'=t1+δt1,t2'=t2+δt2。
26、mauv在运动时,由合成基线定位算法得出的定位点组成潜器的运动轨迹,选择其中合适的定位点并得到其工况数据(α,γ,l,c,t1,t2,h1)后,式(7)的输入变量只有各参数的误差,即:
27、x'=f1(δt1,δt2,δc,δl,δα,δγ,δh1) (8)
28、进一步,步骤s3具体包括:
29、用样本矩阵a,b和ci中的所有输入值计算模型输出,得到3个n×1维模型输出向量:
30、
31、进一步,步骤s4具体包括:
32、一阶灵敏度系数的方法如下:
33、
34、其中
35、
36、同样,该方法估计总阶灵敏度系数如下:
37、
38、一阶灵敏度系数表示单个输入参数误差对定位结果影响的贡献,总阶灵敏度系数不但反映单个参数误差对定位结果的影响,还反映与其他参数交互作用时对定位结果所产生的影响。全局灵敏度系数越大代表该参数误差对于定位结果的影响越大。按照灵敏度系数大小的进行排序,得到参数误差的重要性顺序,对于参数误差影响较大的参数应着重改善其输入的精度,由此来改善定位结果。
39、本发明通过量化合成基线水声定位系统输入参数误差对于输出参数的影响,根据对最终计算得到的灵敏度系数大小的排序结果,可以快速找到对输出结果影响较大的输入参数误差,并以此来制定相应的优化方案,提高定位系统的精确度与稳定性。
40、本发明的有益效果:
41、1.本发明方法提出一种合成基线水声定位算法参数全局灵敏度分析方法,涉及对合成基线定位系统的建模分析,在此基础上建立其全局灵敏度模型,通过全局灵敏度分析得到合成基线定位算法参数波动对输出影响最大的因素。具体为通过合成基线定位算法建模分析得到水听器水平面的解,研究输入设计参数波动对输出坐标参数的全局灵敏度的影响,并根据计算得到灵敏度的系数大小对参数误差的重要性进行排序,为合成基线定位算法的性能参数设计与优化提供方案指导。
42、2.本发明方法通过全局灵敏度分析方法研究了合成基线定位算法的设计参数的波动对其定位精度的影响,全局灵敏度分为一阶灵敏度系数和总阶灵敏度系数。全局灵敏度可以为设计人员对合成基线定位算法进行合理参数设计和资源分配,从而将输入参数波动对于定位精度的影响降到最小,从而提高系统在复杂、不确定的环境下的可靠性和定位精确度。
- 还没有人留言评论。精彩留言会获得点赞!