一种机器人定位方法及相关设备与流程
本发明涉及机器人控制,尤其涉及一种机器人定位方法及相关设备。
背景技术:
1、随着机器人制造技术的增强和应用领域的拓展,对机器人的智能程度的要求日益增加。目前的机器人多采用amcl(adaptive monte carlo localization)自适应蒙特卡洛定位技术对机器人进行定位,采用粒子滤波器对机器人所处的位置进行评估,并根据评估结果结合已知的地图信息确定机器人的当前所处位置,适用于大范围地图的局部定位问题。
2、但是目前的机器人定位方法无法自动确定机器人当前所处的地图,尤其是在机器人发生较大范围的位移的情况下,无法及时检测到地图的转换,导致无法同步更新进行匹配定位的地图信息,使得机器人基于错误的地图继续进行定位,进而则会导致定位信息准确性降低,并且难以及时定位故障的发生时间,导致数据的实用性进一步降低。
技术实现思路
1、本发明提供了一种机器人定位方法及相关设备,以解决目前的机器人定位方法通过已知地图进行匹配定位,无法自动确定机器人当前所处的地图,且无法检测到地图的转换,进而导致机器人的定位信息准确性降低,难以及时定位故障的发生时间,导致数据的实用性进一步降低的问题。
2、第一方面,本发明提供了一种机器人定位方法,包括:
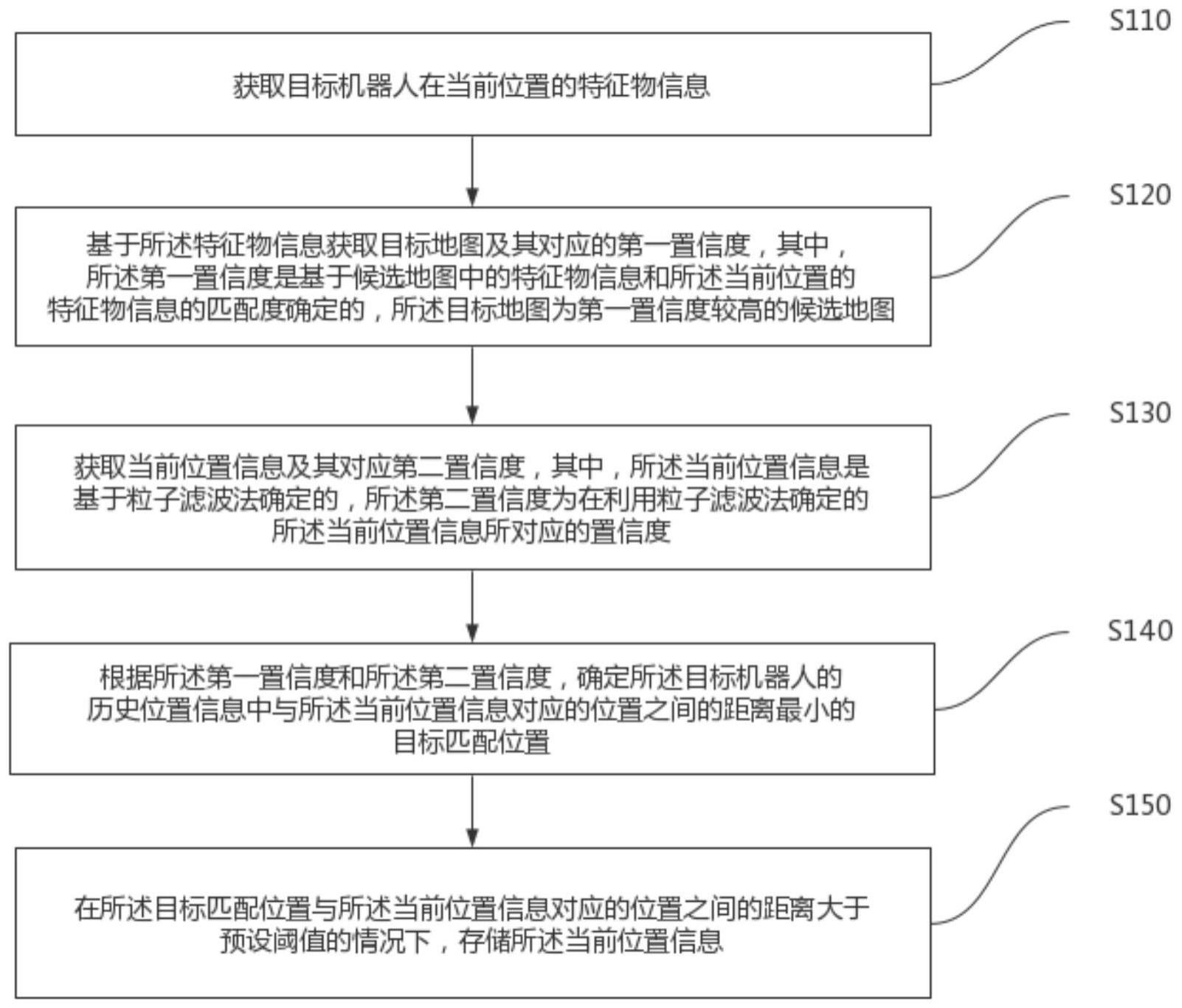
3、获取目标机器人在当前位置的特征物信息;
4、基于所述特征物信息获取目标地图及其对应的第一置信度,其中,所述第一置信度是基于候选地图中的特征物信息和所述当前位置的特征物信息的匹配度确定的,所述目标地图为第一置信度较高的候选地图;
5、获取当前位置信息及其对应第二置信度,其中,所述当前位置信息是基于粒子滤波法确定的,所述第二置信度为在利用粒子滤波法确定的所述当前位置信息所对应的置信度;
6、根据所述第一置信度和所述第二置信度,确定所述目标机器人的历史位置信息中与所述当前位置信息对应的位置之间的距离最小的目标匹配位置;
7、在所述目标匹配位置与所述当前位置信息对应的位置之间的距离大于预设阈值的情况下,存储所述当前位置信息。
8、可选的,所述的机器人定位方法,还包括:
9、在所述距离小于或等于所述预设阈值的情况下,获取所述目标匹配位置的目标匹配样本集;
10、在所述目标匹配样本集的样本数量小于第一预设样本数量的情况下,将所述当前位置信息添加至所述目标匹配样本集中。
11、可选的,所述的机器人定位方法,还包括:
12、在所述样本数量大于或等于所述第一预设样本数量的情况下,确定第一样本集和第二样本集,其中,所述第一样本集包括第二预设样本数量的存储时间较早且连续存储的目标匹配样本,所述第二样本集包括第三预设样本数量的存储时间较晚且连续存储的目标匹配样本;
13、获取所述第一样本集和/或所述第二样本集中的所述目标匹配样本对应的所述第二置信度的置信度差值;
14、在所述置信度差值大于或等于预设置信度差值的情况下,停止将所述当前位置信息添加至所述目标匹配样本集中。
15、可选的,所述的机器人定位方法,还包括:
16、在所述置信度差值小于预设置信度差值的情况下,获取所述第二样本集中的所述目标匹配样本对应的所述第二置信度的置信度方差;
17、基于所述置信度方差确定所述当前位置信息的第二置信度的可信程度;
18、在所述可信程度大于或等于所述预设可信阈值的情况下,获取所述目标地图的所述第一置信度与所述第一样本集中的所述目标匹配样本对应的所述第一置信度的匹配情况;
19、在未匹配到所述目标机器人所处的目标地图的第一置信度的情况下,停止将所述当前位置信息添加至所述目标匹配样本集中。
20、可选的,所述的机器人定位方法,还包括:
21、在匹配到所述目标机器人所处的目标地图的第一置信度的情况下,获取所述目标所处位置的特征物分布情况;
22、根据所述特征物分布情况,判断所述目标机器人当前是否处于无特征区域;
23、在所述目标机器人处于所述无特征区域的情况下,停止将所述当前位置信息添加至所述目标匹配样本集中。
24、可选的,所述的机器人定位方法,还包括:
25、在所述目标机器人未处于所述无特征区域的情况下,将所述目标机器人所处的目标地图、所述第一置信度、所述当前位置信息及所述第二置信度存储至所述目标机器人的所述历史位置信息中所述目标匹配位置的所述目标匹配样本集中。
26、可选的,在所述根据所述第一置信度和所述第二置信度,确定所述目标机器人的历史位置信息中与所述当前位置信息对应的位置之间的距离最小的目标匹配位置的步骤之前,还包括:
27、获取所述历史位置信息中的位置信息数量;
28、在所述位置信息数量为零的情况下,将所述目标机器人所处的目标地图、所述第一置信度、所述当前位置信息及所述第二置信度存储至所述历史位置信息中。
29、第二方面,本发明还提供了一种机器人定位装置,其特征在于,包括:
30、特征获取模块,用于获取目标机器人在当前位置的特征物信息;
31、地图匹配模块,用于基于所述特征物信息获取目标地图及其对应的第一置信度,其中,所述第一置信度是基于候选地图中的特征物信息和所述当前位置的特征物信息的匹配度确定的,所述目标地图为第一置信度较高的候选地图;
32、位置匹配模块,用于获取当前位置信息及其对应第二置信度,其中,所述当前位置信息是基于粒子滤波法确定的,所述第二置信度为在利用粒子滤波法确定的所述当前位置信息所对应的置信度;
33、确定模块,用于根据所述第一置信度和所述第二置信度,确定所述目标机器人的历史位置信息中与所述当前位置信息对应的位置之间的距离最小的目标匹配位置;
34、存储模块,用于在所述目标匹配位置与所述当前位置信息对应的位置之间的距离大于预设阈值的情况下,存储所述当前位置信息。
35、第三方面,本发明还提供了一种电子设备,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机程序时实现如上述第一方面任一种所述的机器人定位方法的步骤。
36、第四方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面任一种所述的机器人定位方法的步骤。
37、由以上技术方案可知,本技术实施例提供了一种机器人定位方法及相关设备,包括:获取目标机器人在当前位置的特征物信息;基于所述特征物信息获取目标地图及其对应的第一置信度,其中,所述第一置信度是基于候选地图中的特征物信息和所述当前位置的特征物信息的匹配度确定的,所述目标地图为第一置信度较高的候选地图;获取当前位置信息及其对应第二置信度,其中,所述当前位置信息是基于粒子滤波法确定的,所述第二置信度为在利用粒子滤波法确定的所述当前位置信息所对应的置信度;根据所述第一置信度和所述第二置信度,确定所述目标机器人的历史位置信息中与所述当前位置信息对应的位置之间的距离最小的目标匹配位置;在所述目标匹配位置与所述当前位置信息对应的位置之间的距离大于预设阈值的情况下,存储所述当前位置信息。由于目前的机器人定位方法无法自动确定机器人当前所处的地图,且无法检测到地图的转换,进而导致机器人的定位信息准确性降低,难以及时定位故障的发生时间,导致数据的实用性进一步降低的问题。而本技术实施例通过目标机器人在当前位置的特征物信息确定一个第一置信度较高的目标地图,可以确定机器人当前所处的地图,通过粒子滤波法基于确定的目标地图确定目标机器人的当前位置信息及其第二置信度,基于上述第一置信度和第二置信度判断是否需要获取历史位置信息,进而可以确定历史位置信息中与当前位置信息对应的位置之间的距离最小的目标匹配位置,在目标匹配位置与当前位置信息对应的位置之间距离大于预设阈值的情况下,可以认为目标机器人当前处于一个新的位置,则存储当前位置信息,从而可以提高机器人定位信息的准确性、客观性和实用性。
- 还没有人留言评论。精彩留言会获得点赞!