一种用于多线激光三维测量系统的光平面标定方法
本发明涉及光学测量领域,具体地说,是一种用于多线激光三维测量系统的光平面标定方法。
背景技术:
1、基于激光三角法原理的线结构光三维测量具有高精度的测量优势,在进行结构光线扫测量时,如何提高测量效率成为研究重点。为了实现快速测量的目标,最多研究的就是多线结构光三维测量,保证测量精度的同时提高测量效率。
2、研究人员提出一种利用半导体激光模块将多个光平面同时投射到被测物表面的三维测量技术,并给出了多线结构光系统测量的数学模型和相关算法。该方法中传感器可以安装在一个相对随机的位置,因此系统的安装和调整变得非常容易和灵活。通过各光平面独立标定,可以视为多个线激光独立工作。有学者提出了一种基于激光扫描测量技术的多结构线性照明(或多光刀)非接触测量新方法。为提高所研制的多光刀测量装置的精度,应用虚拟网络映射和最小二乘方法分别对多光刀测量装置在整个测量领域内进行标定,分别对每条线进行标定,精度不高且标定过程复杂。有研究人员对现有标定板进行修改,并利用随机样本一致性算法(ransac)将每条条纹的中心线变换成三维点云拟合成一个平面。可降低多线结构光平面整体拟合结果的相对误差,并从标定光平面间的角度误差方面提高了光平面的整体标定精度。同样的,这个方法还是独立对光平面进行标定,相较而言容易带来误差。除了通过光平面的方式对系统进行标定,还有研究人员提出多平行线激光系统的测量模型,引入了多基面概念推导测量系统公式,从而简化标定过程;但是这类基于系统数学模型的标定方式依赖系统安装精度。
3、当前多线激光平面的标定方法或者各激光平面独立标定,或者基于系统的数学模型,这样的方式往往由于光路或机械误差而导致标定精度降低。光栅作为精密光学元件,可以通过光栅生成各种结构光照明物体并利用生成的精细结构光分布实现三维重建过程,基于光栅衍射约束的标定方式能够实现更高的测量精度。
技术实现思路
1、为解决现有技术的不足,本发明的目的在于提供一种用于多线激光三维测量系统的光平面标定方法,通过光栅衍射生成线结构光,调整光阑宽度选择工作的激光条纹衍射级次;利用相位板进行激光条纹亮度重新分布;利用多线激光的衍射方程约束实现系统标定;提高多线激光系统光平面的标定精度,实现测量精度和效率的提高。
2、为了实现上述目标,本发明采用的技术方法具体如下:
3、本发明公开了一种用于多线激光三维测量系统的光平面标定方法,包括:
4、获取不同位置下多组棋盘格标定图片,正常曝光下采集清晰的棋盘格图像,在低曝光参数下采集落在棋盘格平面上的各级次激光条纹图像;
5、通过上述正常曝光下采集清晰的棋盘格图像组来标定相机的内外参矩阵;
6、通过相机的外参矩阵计算对应位置棋盘格平面的相机坐标系的平面方程;
7、通过上述低曝光参数下采集落在棋盘格平面上的各级次激光条纹图像,采用中心线提出算法计算各级次激光条纹中心线像素坐标;
8、通过相机内参矩阵和各级次激光条纹中心线的像素坐标计算激光条纹中心线的相机坐标系下的齐次坐标;
9、通过相机各位置的外参将对应位置处的世界坐标系下的棋盘格平面方程转换到相机坐标系下的平面方程;
10、联立激光条纹中心线相机齐次坐标和相机坐标系下棋盘格的平面方程,将激光条纹中心线的相机齐次坐标转化为激光条纹中心线的相机坐标系下的三维坐标;
11、确定低曝光参数下采集的落在棋盘格平面上的激光条纹图像上各激光条纹对应的衍射激光线级次,并将对应衍射激光条纹的中心线相机坐标代入对应级次的激光条纹光平面方程,得到各衍射激光条纹所在光平面方程系数的初始值;
12、选取激光条纹中心点到光平面方程的距离平方作为目标函数,光栅方程衍射角关系为约束,通过有约束的最小二乘优化算法得到各平面法向量(ai,bi,ci)的优化值;
13、根据各衍射光平面在空间交于一条直线,并通过空间直线方程表达并代入各光平面的法向量优化值,完成对各光平面位置参数的优化。
14、作为进一步地改进,本发明所述的获取不同位置下多组棋盘格标定图片,具体为:
15、相机和线激光器保持位置不变,而移动棋盘格位置,棋盘格在同一位置时采集两张标定图像:相机正常曝光下采集清晰的棋盘格照片,在相机低曝光参数下采集落在棋盘格平面上的激光条纹图像,两张图像拍完后移动棋盘格采集多组图像。
16、作为进一步地改进,本发明所述将对应衍射激光条纹的激光条纹中心线的相机坐标代入,得到各激光条纹所在光平面方程,具体为:
17、第i级衍射条纹对应的光平面πi上的激光条纹中心线相机坐标为
18、(xik,yik,zik),i=0,±1,...±n,k=1,2,...m;
19、上式中,m为各级次激光条纹上的中心点数量,若光平面的法向量为(ai,bi,ci),平面点云各方向取平均(xi0,yi0,zi0),平面方程可表示为
20、ai(x-xi0)+bi(y-yi0)+ci(z-zi0)=0;
21、将所有激光条纹中心线点坐标(xik,yik,zik)代入上述公式,并用矩阵形式表示为
22、
23、通过svd算法得到各平面法向量(ai,bi,ci)的初始值。
24、作为进一步地改进,本发明所述以选取激光条纹中心点到光平面方程的距离平方作为目标函数,光栅方程衍射角关系为约束,通过有约束的最小二乘优化算法得到各平面法向量(ai,bi,ci)的优化值具体为:
25、选取激光条纹中心点坐标(xik,yik,zik)到光平面方程的距离平方作为目标函数,即
26、
27、同时,i级光平面的与0级光平面的夹角θi满足如下关系
28、
29、
30、上式中,λ为激光中心波长,dg为光栅常数;
31、通过有约束的最小二乘优化算法得到各平面法向量(ai,bi,ci)的优化值。
32、作为进一步地改进,本发明所述根据各衍射光平面在空间交于一条直线,并通过空间直线方程表达并代入各光平面的法向量优化值,完成对各光平面位置参数的优化具体为:
33、衍射激光条纹的光平面空间内共线,可表示为两基平面组合
34、λ(e11x+e12y+e13z+e14)+μ(e21x+e22y+e23z+e24)=0;
35、将得到的平面法(ai,bi,ci)向量代入上式,可得到如下矩阵
36、
37、通过拟合得到基平面方程和各激光条纹的光平面的系数组合,各激光条纹的光平面方程可由对应的组合系数和两个基平面方程得到,从而完成对光平面标定的优化。
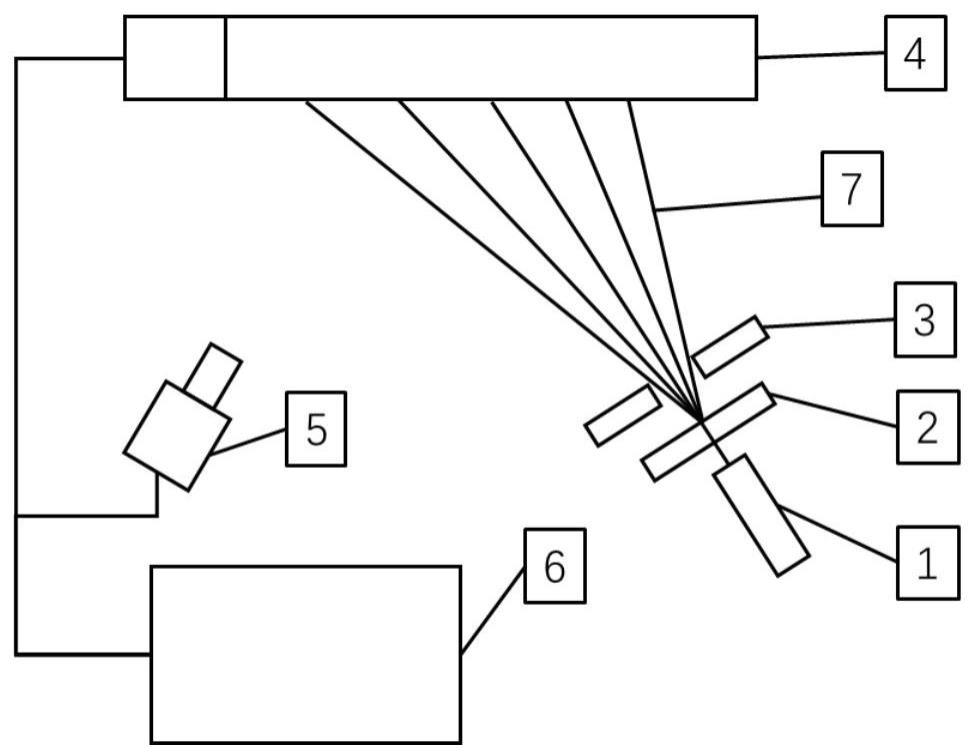
38、作为进一步地改进,本发明所述的标定方法基于以下装置实现:
39、线激光器用于发射线激光条纹;
40、多线激光条纹由线激光器通过光栅衍射方式产生;位于线激光器前方的衍射光栅,用于将线激光条纹分为具有一定空间分布的多级次线激光条纹;条纹分布可以根据光栅参数进行调整;
41、位于衍射光栅前方的矩形光阑,用于遮挡高级次的低能量激光条纹,使得产生的特定级次的多束线型激光条纹投影到物体表面;并通过相位板使得生成的激光条纹光强均匀分布;
42、从另外一个角度采集变形的多线激光条纹图像的相机;
43、放置物体且移动物体进行扫描测量的平移台;
44、分别与相机和平移台的驱动电机相连的工控机。
45、与现有技术相比,本发明所达到的有益效果:
46、本文提出了一种新的基于衍射光栅生成的多线结构光的三维测量系统。在其中的物体前的激光线光路后添加衍射光栅以生成多线结构光。
47、与传统的多线激光三维传感器相比,衍射光栅在物体上产生多个衍射线激光,这样可以同时获得物体表面的多条线位置处的表面三维信息。同时,衍射级次的选择可以根据物体的面型进行选择。
48、由于光栅衍射生成多线结构光,各级次的激光线具有精确的空间光场分布。
49、由于多线的光平面存在精密的约束,通过该约束对系统进行标定可以提高光平面标定精度,从而提高系统测量精度。
50、本系统不但能够提高测量系统的精度,还具有光源紧凑的优势,便于装置的小型化,具有很大的应用价值。
- 还没有人留言评论。精彩留言会获得点赞!