垂直组件运动位置的纠正方法及装置、设备及存储介质与流程
本发明涉及位置纠正,尤其涉及基于垂直组件运动位置的纠正方法及装置、设备及存储介质。
背景技术:
1、血液分析仪中常见采样组件为旋转式,旋转式的采样组件主要包括垂直组件和水平组件,垂直组件与水平组件之间连接,正常工作时,水平组件水平方向旋转将所述垂直组件移至目标位置,进行移液操作;垂直组件上下移动至相应的位置进行加样或者吸样操作。
2、但是垂直组件的工作时,可能会受到水平电机或者其他因素影响,发生位置偏移,从而影响垂直组件运动准确性,导致系统误差较大。
技术实现思路
1、基于此,有必要针对上述问题,提出垂直组件运动位置的纠正方法及装置、设备及存储介质,以解决垂直组件运动准确性低,系统误差大的问题。
2、为实现上述目的,本技术第一方面提供一种垂直组件运动位置的纠正方法,所述方法应用于采样组件,所述采样组件至少包括垂直组件和水平组件,所述垂直组件与所述水平组件连接,所述方法包括:
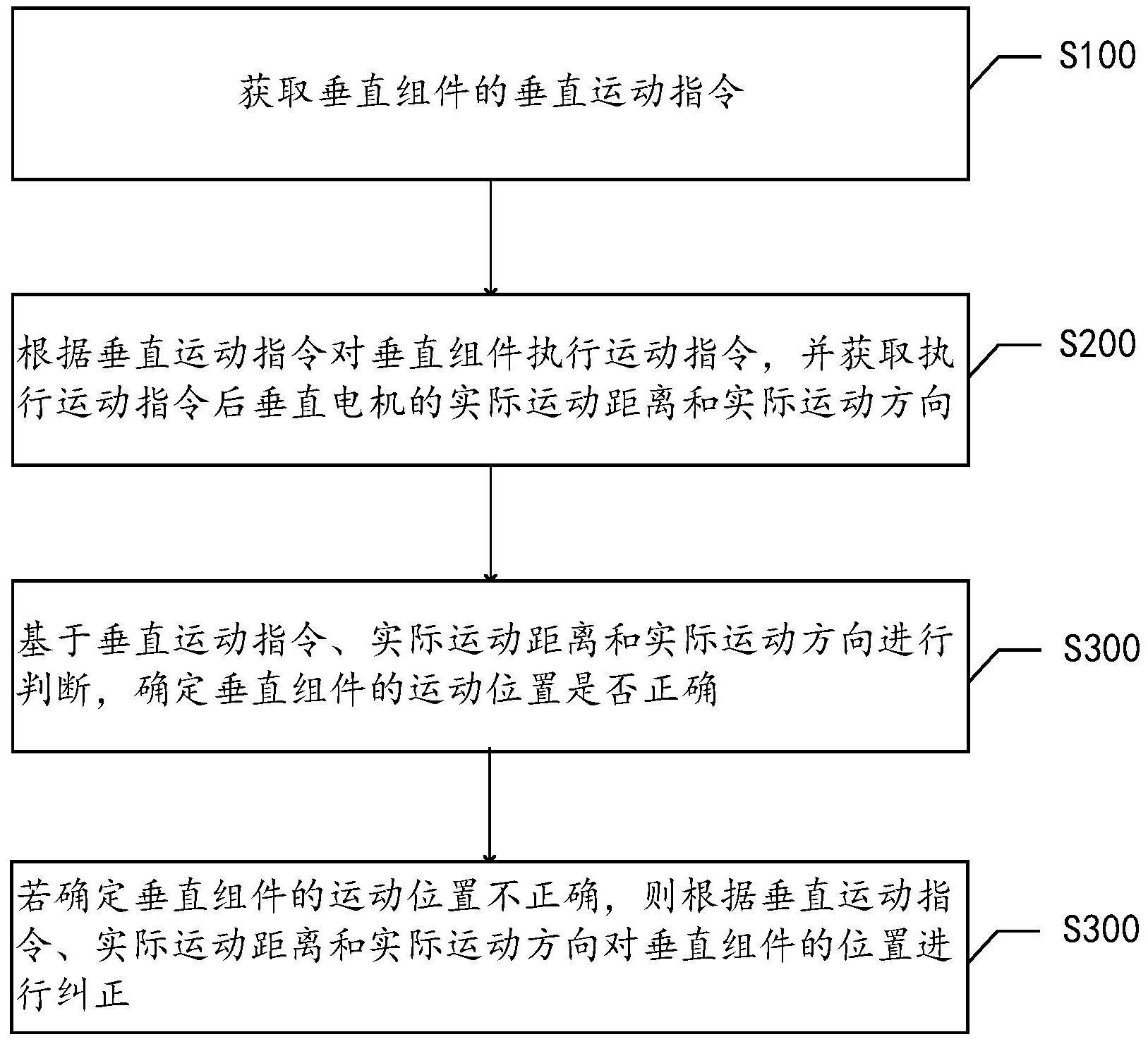
3、获取所述垂直组件的垂直运动指令,所述垂直运动指令包括垂直运动距离和垂直运动方向;
4、根据所述垂直运动指令对所述垂直组件执行运动指令,并获取执行运动指令后所述垂直电机的实际运动距离和实际运动方向;
5、基于所述垂直运动指令、所述实际运动距离和所述实际运动方向进行判断,确定所述垂直组件的运动位置是否正确;
6、若确定所述垂直组件的运动位置不正确,则根据所述垂直运动指令、所述实际运动距离和所述实际运动方向对所述垂直组件的位置进行纠正。
7、进一步的,所述基于所述垂直运动指令、所述实际运动距离和所述实际运动方向进行判断,确定所述垂直组件的运动位置是否正确,具体包括:
8、基于所述垂直运动方向和所述实际运动方向,判断所述实际运动方向是否与所述垂直运动方向一致;
9、若确定所述实际运动方向与所述垂直运动方向不一致,则所述垂直组件的运动位置不正确;
10、若确定所述实际运动方向与所述垂直运动方向一致,则基于所述实际运动距离与所述垂直运动距离,判断所述实际运动距离与所述垂直运动距离是否相同;
11、若确定所述实际运动距离与所述垂直运动距离相同,则所述垂直组件的运动位置正确;
12、若确定所述实际运动距离与所述垂直运动距离不相同,则所述垂直组件的运动位置不正确。
13、进一步的,所述根据所述垂直运动指令对所述垂直组件执行运动指令,具体包括:
14、若接收到水平组件的水平运动指令,则获取所述水平运动指令,所述水平运动指令包括水平旋转角度和所述水平运动方向;
15、基于所述水平组件与所述垂直组件之间发生位置偏移的相对关系,以及所述水平运动指令,得到所述垂直组件的补偿方向和补偿步数;
16、根据所述补偿方向、所述补偿步数对所述垂直运动指令进行更新,生成目标运动指令,对所述垂直组件执行所述目标运动指令,所述目标运动指令包括目标运动方向与目标运动距离。
17、进一步的,所述相对关系包括机械比和转动关系,其中,所述机械比为所述水平组件转动单位角度与所述垂直组件产生位置偏移的距离之间的比值,所述转动关系为所述水平组件的运动方向与所述垂直组件的偏移方向之间的转动关系;
18、所述基于所述水平组件与所述垂直组件之间发生位置偏移的相对关系,以及所述水平运动指令,得到所述垂直组件的补偿方向和补偿步数,具体包括:
19、根据所述水平旋转角度和所述机械比进行计算,得到补偿距离;
20、基于所述水平旋转方向和所述转动关系分析,得到补偿方向。
21、进一步的,所述基于所述水平旋转方向和所述转动关系分析,得到补偿方向,具体包括:
22、当所述水平组件顺时针旋转,所述垂直组件偏移的方向为垂直水平面向上时,所述补偿方向为垂直水平面向下;
23、当所述水平组件顺时针旋转,所述垂直组件偏移的方向为垂直水平面向下时,所述补偿方向为垂直水平面向上。
24、进一步的,所述根据所述补偿方向、所述补偿步数对所述垂直运动指令进行更新,生成目标运动指令,对所述垂直组件执行所述目标运动指令,具体包括:
25、若垂直运动方向与所述补偿方向相同,则确定所述目标运动方向为所述垂直运动方向,及确定所述目标运动距离为所述垂直运动步数与所述补偿步数的和;
26、若垂直运动方向与所述补偿方向不同,则判断所述垂直运动步数与所述补偿步数的大小;
27、若所述垂直运动步数大于所述补偿步数,则确定所述目标运动方向为所述垂直运动方向,及确定所述目标运动距离为所述垂直运动步数与所述补偿步数的差;
28、若所述垂直运动步数小于所述补偿步数,则确定所述目标运动方向为所述补偿方向,及确定所述目标运动距离为所述补偿步数与所述垂直运动步数的差;
29、若所述垂直运动步数与所述补偿步数相同,则确定所述目标运动方向为任意方向,及确定所述目标运动距离为零;
30、基于所述目标运动方向和所述目标运动距离对所述垂直组件执行所述垂直运动指令。
31、进一步的,在所述基于所述垂直运动指令、所述实际运动距离和所述实际运动方向进行判断,确定所述垂直组件的运动位置是否正确,之后还包括:
32、若确定所述垂直组件的运动位置不正确,则发出系统故障的警告提醒。
33、为实现上述目的,本技术第二方面提供一种垂直组件运动位置的纠正装置,所述装置包括:指令获取单元、指令执行单元和位置控制单元;
34、所述指令获取单元,用于获取所述垂直组件的垂直运动指令,所述垂直运动指令包括垂直运动距离和垂直运动方向;
35、所述指令执行单元,用于根据所述垂直运动指令对所述垂直组件执行运动指令,并获取执行运动指令后所述垂直电机的实际运动距离和实际运动方向;
36、所述位置控制单元,用于基于所述垂直运动指令、所述实际运动距离和所述实际运动方向进行判断,确定所述垂直组件的运动位置是否正确;
37、若确定所述垂直组件的运动位置不正确,则根据所述垂直运动指令、所述实际运动距离和所述实际运动方向对所述垂直组件的位置进行纠正。
38、为实现上述目的,本技术第三方面提供一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,使得所述处理器执行如第一方面所述方法的步骤。
39、为实现上述目的,本技术第四方面提供一种计算机设备,包括存储器和处理器,其特征在于,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如第一方面所述方法的步骤。
40、采用本发明实施例,具有如下有益效果:
41、本发明的垂直组件运动位置的纠正方法应用于采样组件,首先获取垂直组件的垂直运动指令,垂直运动指令包括垂直运动距离和垂直运动方向,根据垂直运动指令对垂直组件执行运动指令,并获取执行运动指令后垂直电机的实际运动距离和实际运动方向,基于垂直运动指令、实际运动距离和实际运动方向进行判断,确定垂直组件的运动位置是否正确,若确定垂直组件的运动位置不正确,则根据垂直运动指令、实际运动距离和实际运动方向对垂直组件的位置进行纠正,通过垂直组件的实际运动方向、实际运动距离、垂直运动距离和垂直运动方向判断垂直组件的运动位置是否准确,以及对垂直组件的位置进行纠正,消除垂直组件的位置偏移的情况,使得垂直组件的运动位置更加准确,有效地减小了系统误差。
- 还没有人留言评论。精彩留言会获得点赞!