一种柔性空间盘绕式伸展臂位姿确定装置和方法
本发明属于空间可展开机构的测量,涉及到空间柔性盘绕式伸展臂展开后顶部相对于根部的位姿确定装置。
背景技术:
1、空间盘绕式伸展臂是一种比刚度大、展开收拢比高的一维空间展开机构,通常由纵杆、横架以及对角加劲索组成。空间盘绕式伸展臂可分成若干节,每一节包括对应的横架、对角加劲索以及纵杆的一部分。纵杆和横杆通常采用弹性较高、弯曲能力较强的材料,如s2/环氧树脂或记忆合金等。在航天器发射阶段,纵杆沿横架周向弯曲,使得空间盘绕式伸展臂处于收拢状态,包络极小,航天器入轨后,存储在变形材料中的应变能转化为空间盘绕式伸展臂的展开动能,纵杆伸直,伸展臂展开至预定构型,展开收拢比可达20:1以上。由于盘绕式伸展臂可以提供远离卫星本体的安装环境,且构型简单、展开可靠、可重复性强,因而在空间任务中有着广泛地应用。盘绕式伸展臂是一种大长细比柔性展开机构,多次重复收拢展开后容易积累残余变形;同时,在轨运行过程中航天器交替进入光照区与地影区,温度环境恶劣,也会引起材料热变形的产生。空间盘绕式伸展臂的变形会引起指向偏差,这将对顶端所搭载精密科学载荷的探测工作产生影响,因而需要实时测量伸展臂顶端相对底部基座的位置及姿态,进而对相关数据进行有针对性地补偿或校准。
技术实现思路
1、为了有效测量空间盘绕式伸展臂由于热变形等因素引起的指向偏差问题,本发明设计了一种空间盘绕式伸展臂位姿确定装置。盘绕式伸展臂展开后,位于伸展臂顶端的位置传感器接收伸展臂底部平台激光器所发射激光,根据激光束在传感器上的位置变化,可以确定盘绕式伸展臂的展开位姿。
2、本发明的技术方案如下:
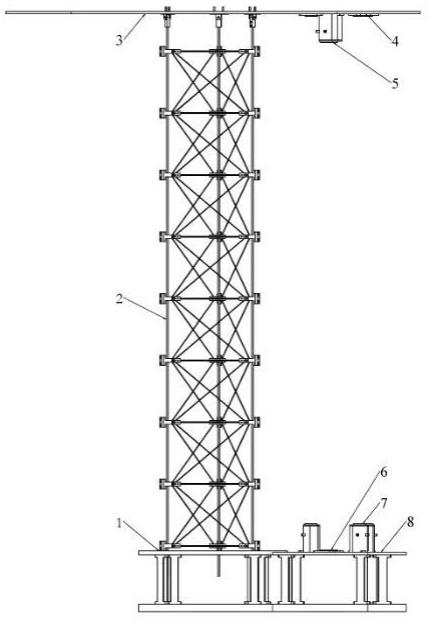
3、本发明公开了一种空间盘绕式伸展臂位姿确定装置,包括伸展臂基座[1]、被测盘绕式伸展臂[2]、设备安装板[3]、顶部测量组件(位置传感器)[4]、顶部测量组件(激光发射器)[5]、底部测量组件(位置传感器)[6]、底部测量组件(激光发射器)[7]、测量基座[8]:
4、所述伸展臂基座[1]位置固定,是整个装置的测量基准;被测盘绕式伸展臂[2]底部安装在伸展臂基座[1]上,顶部则是设备安装板[3];设备安装板[3]可提供定制化接口,用于有效载荷等设备的安装;被测盘绕式伸展臂[2]具备收拢和展开两种状态,位姿确定过程仅针对其展开状态。
5、所述测量基座[8]可根据需求沿伸展臂基座[1]周向调整位置,选定位置后保持固定;底部测量组件[6-7]包括激光器支架ⅰ/ⅱ/ⅲ[9-11]、激光发射器ⅰ/ⅱ/ⅲ[12-14]、位置传感器ⅳ/ⅴ[15-16]。激光器支架ⅰ/ⅱ/ⅲ[9-11]固定于测量基座[8]上,激光发射器ⅰ/ⅱ/ⅲ[12-14]安装在支架中,可根据指令向正上方发射光斑极小的激光束。位置传感器ⅳ/ⅴ[15-16]固定于测量基座[8]上,可接收激光束,并输出接收时间以及入射点的二维坐标信息。
6、顶部测量组件[4-5]包括位置传感器ⅰ/ⅱ/ⅲ[17-19]、激光器支架ⅳ/ⅴ[20-21]、激光发射器ⅳ/ⅴ[22-23]。根据激光发射与接收的位置、时间等信息,即可解算出顶部设备安装板与底部测量基座的相对位姿信息。
7、本发明所述的空间盘绕式伸展臂位姿确定装置,其优点是:以实施简单、可靠性好的形式实现了盘绕式伸展臂在空间环境中的相对位姿测量,使用到的零件数量少,原理简单,占用星上计算资源少。可用于盘绕式伸展臂、航天器大型太阳电池阵、空间站柱结构等的高精度测量和控制。
技术特征:
1.一种空间盘绕式伸展臂位姿确定装置,包括伸展臂基座、被测盘绕式伸展臂、设备安装板、测量基座、底部测量组件、顶部测量组件。由测量组件相关信息,可解算出被测盘绕式伸展臂展开状态下顶部与底部的相对位姿。
2.如权利要求1所述的空间盘绕式伸展臂位姿确定装置,其特征在于:所述被测盘绕式伸展臂安装在伸展臂基座上,解锁后可在内贮应变能的作用下自行旋转展开,是一种空间展开机构。
3.如权利要求1所述的空间盘绕式伸展臂位姿确定装置,其特征在于:所述设备安装板固定于盘绕式伸展臂顶部,在执行空间任务时,搭载其上的有效载荷可随着伸展臂的展开移动至远离航天器本体的位置。
4.如权利要求1所述的空间盘绕式伸展臂位姿确定装置,其特征在于:所述测量基座可沿着伸展臂基座周向调整位置,从而保证激光发射器发射的光束能够顺利进入位置传感器的光敏面范围内。
5.如权利要求1所述的空间盘绕式伸展臂位姿确定装置,其特征在于:所述激光器支架用于安装激光发射器,激光发射器受激励后可向前方发射光斑极小的激光束;所述位置传感器与激光发射器配对使用,可以输出激光束入射时间及入射点的二维坐标信息。
6.如权利要求1所述的空间盘绕式伸展臂位姿确定装置,其特征在于:所述激光发射器与位置传感器安装位置坐标固定,结合激光束输出的入射点位置信息,可以确定被测盘绕式伸展臂顶部与底部的相对位姿关系。
技术总结
本发明公开了一种空间盘绕式伸展臂位姿确定装置,该装置包括:伸展臂基座、被测盘绕式伸展臂、设备安装板、测量基座、底部测量组件和顶部测量组件。安装在基座(卫星、空间站等航天器)上的被测盘绕式伸展臂展开后,激光发射器启动工作,位置传感器可接收相关激光束并输出入射点位置信息。结合设备安装坐标及入射点坐标等信息,可确定伸展臂顶部与底部的相对位姿。本发明可以用于大型伸展臂、通信天线等空间展开机构的相对位姿测量,极具工程应用价值。
技术研发人员:孙亮,黄海,赵旭瑞,段诗阳,刘宇
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!