一种SINS/CNS深组合导航方法及其系统
本发明涉及惯性/天文组合导航,更具体的说是涉及一种sins/cns深组合导航方法及其系统。
背景技术:
1、捷联惯导子系统(sins)是一种完全自主的导航技术,具有短时精度高、输出连续、抗干扰能力强、导航信息完整等优点,但其导航误差随时间积累,难以长时间独立工作,需要与其他导航系统进行组合以提高导航性能。天文导航子系统(cns)利用星敏感器观测恒星,从而确定载体的导航参数,其隐蔽性强、自主性好,且无累积误差,能够提供高精度的姿态和位置信息,但也存在输出信息不连续、易受气象条件影响等缺陷。由于sins、cns各有优缺点,将两者结合起来进行组合导航,可以实现优势互补。
2、在现有sins/cns紧组合导航方法中,cns通过星点质心提取算法获得直射星和折射星的星点质心坐标,并进一步计算折射星的视高度。同时,利用sins输出的姿态和位置信息估计直射星星点质心坐标和折射星视高度,然后将sins和cns输出的直射星星点质心坐标差值和折射星视高度差值作为量测量输入至组合导航滤波器中,利用kalman滤波算法对惯导子系统的误差进行估计和补偿。这种方案存在以下几方面缺点:
3、(1)星点质心坐标仅通过星点质心提取算法计算得到,由于天空背景辐射、星敏感器噪声等因素的影响,星图信噪比降低,将导致星点质心提取误差增大,从而导致组合系统导航精度下降。
4、(2)紧组合系统中,每颗恒星的量测信息是等权重的。实际上,由于每颗恒星的星等、星图噪声不同,使得每颗恒星量测信息的精度不同,采用相同的权值会导致组合系统在低信噪比环境中的导航精度下降。
5、(3)星敏感器在进行星点质心提取时,需要对整幅星图进行遍历扫描和阈值分割,从而完成星点与背景的分离。因此,紧组合系统的星点质心提取过程所需时间较长,影响系统的实时性。
6、因此,如何提供一种精度高实时性好的sins/cns深组合导航方法及其系统是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种sins/cns深组合导航方法及其系统,本发明通过引入sins陀螺仪测量的星敏感器角速度信息,为每颗恒星设计了一个单独的星点质心跟踪通道滤波器,在星点预测位置附近范围进行星点质心提取,并利用kalman滤波算法获得高精度的星点质心坐标估计结果。同时根据跟踪通道滤波器的估计均方误差阵,自适应调整组合导航滤波器的量测噪声协方差矩阵,以提高组合导航系统在强噪声下的导航性能。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种sins/cns深组合导航方法,基于惯导子系统sins和天文导航子系统cns,包括以下步骤:
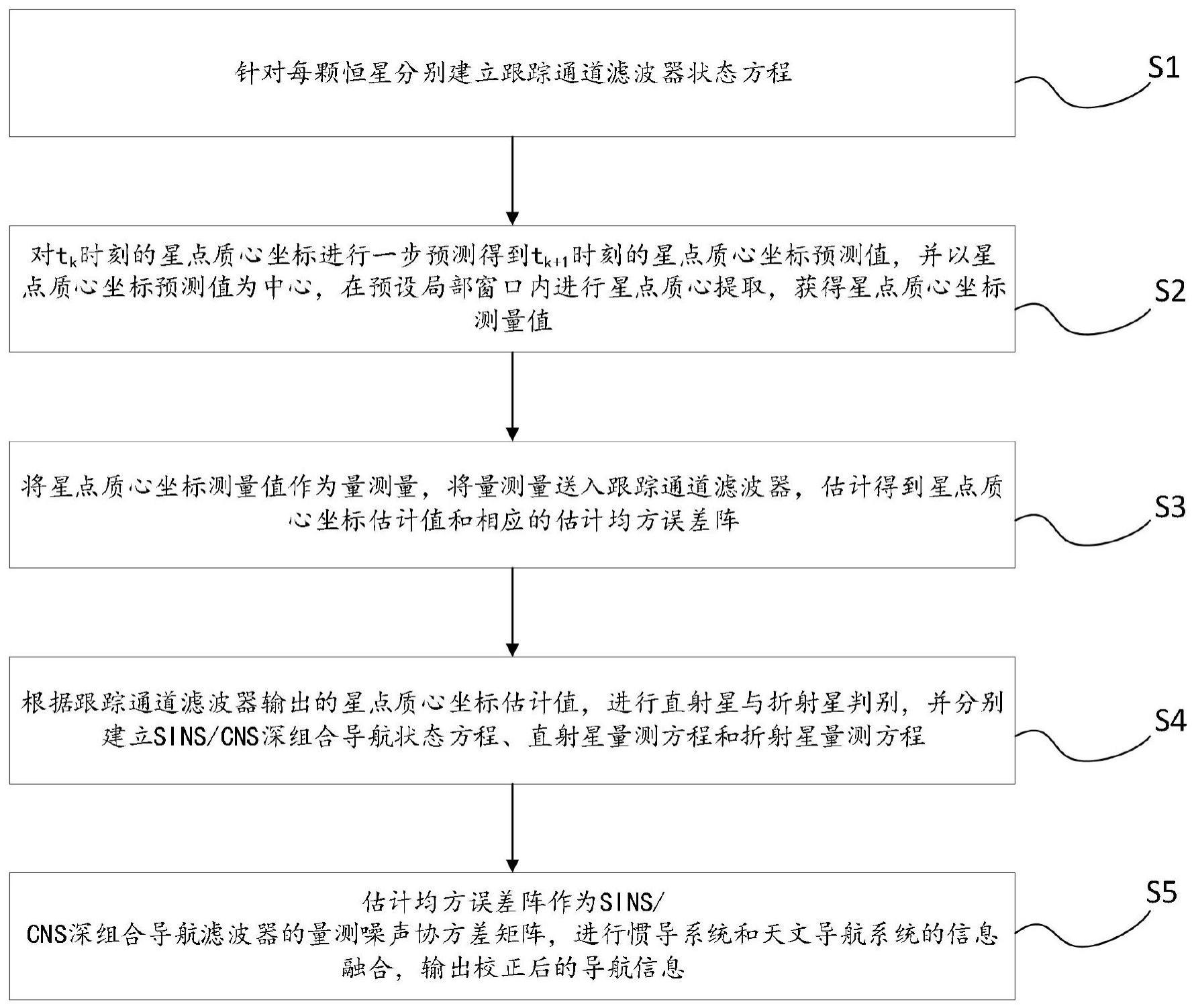
4、s1.根据sins陀螺仪测量的角速度信息,针对每颗恒星分别建立跟踪通道滤波器状态方程;
5、s2.根据所述跟踪通道滤波器状态方程,对tk时刻的星点质心坐标进行一步预测得到tk+1时刻的星点质心坐标预测值,并以星点质心坐标预测值为中心,在预设局部窗口内进行星点质心提取,获得星点质心坐标测量值;
6、s3.将星点质心坐标测量值作为量测量,将量测量送入跟踪通道滤波器,估计得到星点质心坐标估计值和相应的估计均方误差阵;
7、s4.根据跟踪通道滤波器输出的星点质心坐标估计值,进行直射星与折射星判别,并分别建立sins/cns深组合导航状态方程、直射星量测方程和折射星量测方程;
8、s5.利用sins/cns深组合导航状态方程进行sins/cns深组合导航滤波器的时间更新,利用直射星量测方程和折射星量测方程进行sins/cns深组合导航滤波器的量测更新,以估计均方误差阵作为sins/cns深组合导航滤波器的量测噪声协方差矩阵,进行惯导子系统和天文导航子系统的信息融合,并输出校正后的导航信息。
9、优选的,s1的具体内容包括:
10、以恒星的星点质心坐标u,v和陀螺仪常值漂移εx,εy,εz为跟踪通道滤波器的状态量xc,建立跟踪通道滤波器的状态方程为:
11、
12、式中:
13、
14、
15、
16、
17、
18、xc=[u v εx εy εz]t
19、
20、
21、
22、其中,f为星敏感器的焦距;为星敏感器的安装矩阵;为sins陀螺仪输出的角速率;wgx,wgy,wgz为sins陀螺仪的随机测量误差。
23、优选的,s2的具体内容包括:
24、利用sins陀螺仪输出的角速度计算星点质心坐标在像平面上的移动速度
25、
26、式中,(uk,vk)为tk时刻星图中的星点质心坐标;f为星敏感器的焦距;cij为星敏感器安装矩阵中第i行第j列的元素,i=1,2,3,j=1,2,3;为sins陀螺仪输出的角速率;
27、根据tk时刻的星点质心坐标(uk,vk)和星点质心坐标移动速度计算tk+1时刻的星点质心坐标预测值
28、
29、以每个星点质心坐标预测值为中心,在预设局部窗口内进行星点质心提取,获得星点质心坐标测量值
30、优选的,s3的具体内容包括:
31、将星点质心坐标测量值作为跟踪通道滤波器的量测量建立跟踪通道滤波器的量测方程为:
32、zc=hcxc+vc
33、式中,
34、
35、vc=[vu vv]t为星点质心坐标的量测噪声向量;
36、将量测量送入跟踪通道滤波器,估计得到高精度的星点质心坐标估计值和相应的估计均方误差阵。
37、优选的,通过kalman滤波估计得到高精度的星点质心坐标估计值和相应的估计均方误差阵。
38、优选的,s4中建立sins/cns深组合导航状态方程的具体内容包括:
39、解算载体的位置、速度和姿态,并选取sins/cns深组合导航滤波器的状态量x为地理系下数学平台失准角速度误差δvn=[δve δvn δvu]t、位置误差δp=[δl δλ δh]t、陀螺仪常值漂移εb=[εx εy εz]t和加速度计零偏
40、建立sins/cns深组合导航滤波器的状态方程为:
41、
42、式中,
43、
44、
45、
46、
47、
48、
49、
50、03×3为3阶全零矩阵;rm和rn分别为地球子午圈和卯酉圈的曲率半径;λ,l,h分别为载体的经度、纬度、高度;ωie为地球自转角速率;为地球自转角速率在地理系下的分量;为构成的反对称矩阵;为地理下比力fn构成的反对称矩阵;vn=[ve vn vu]t为地理下载体速度;av为vn构成的反对称矩阵;aω为构成的反对称矩阵;wg和wa分别表示陀螺仪和加速度计的测量噪声矢量。
51、优选的,建立sins/cns深组合导航的直射星量测方程的具体内容包括:
52、若为直射星,则根据惯导子系统输出的姿态矩阵估计直射星星点质心坐标并以惯导子系统和天文导航子系统输出的直射星星点质心坐标之差作为量测量,建立sins/cns深组合导航的直射星量测方程:
53、z1=h1x+v1
54、式中:
55、
56、
57、
58、
59、
60、为第j颗直射星在星敏感器坐标系下的星光矢量;为第j颗直射星在星敏感器坐标系下的星光矢量的反对称矩阵。
61、优选的,建立sins/cns深组合导航的折射星量测方程的具体内容包括:
62、若为折射星,则根据跟踪通道滤波器输出的折射星星点坐标,计算折射星的视高度,同时根据sins输出的位置估计折射星视高度,并将sins和cns输出的折射星视高度之差作为量测量,建立sins/cns深组合导航的折射星量测方程:
63、z2=h2x+v2
64、式中:
65、
66、h2=[0n×6 hahb 0n×6];v2=-[vh1 vh2 … vhn]t;
67、
68、
69、
70、
71、x,y,z为载体在惯性系下的位置;[ux uy uz]t为第j颗折射星折射前的星光矢量;rj为第j颗折射星的折射角。
72、优选的,在s5中,利用kalman滤波进行惯导子系统与天文导航子系统的信息融合。
73、一种sins/cns深组合导航系统,基于惯导子系统sins和天文导航子系统cns,包括:跟踪通道滤波器状态方程建立模块、星点质心坐标测量值计算模块、跟踪通道滤波器、直射星折射星判别模块和融合校正模块;
74、跟踪通道滤波器状态方程建立模块,用于根据sins陀螺仪测量的角速度信息,针对每颗恒星分别建立跟踪通道滤波器状态方程;
75、星点质心坐标测量值计算模块与跟踪通道滤波器状态方程建立模块相连,用于根据所述跟踪通道滤波器状态方程,对tk时刻的星点质心坐标进行一步预测得到tk+1时刻的星点质心坐标预测值,并以星点质心坐标预测值为中心,在预设局部窗口内进行星点质心提取,获得星点质心坐标测量值;
76、跟踪通道滤波器与星点质心坐标测量值计算模块相连,用于获取星点质心坐标测量值作为量测量,估计得到星点质心坐标估计值和相应的估计均方误差阵;
77、直射星折射星判别模块与跟踪通道滤波器相连,用于根据跟踪通道滤波器输出的星点质心坐标估计值,进行直射星与折射星判别,并分别建立sins/cns深组合导航状态方程、直射星量测方程和折射星量测方程;
78、融合校正模块与直射星折射星判别模块相连,用于利用sins/cns深组合导航状态方程进行sins/cns深组合导航滤波器的时间更新,利用直射星量测方程和折射星量测方程进行sins/cns深组合导航滤波器的量测更新,以估计均方误差阵作为sins/cns深组合导航滤波器的量测噪声协方差矩阵,进行惯导子系统和天文导航子系统的信息融合,并输出校正后的导航信息。
79、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种sins/cns深组合导航方法,具备以下有益效果:
80、(1)通过引入sins陀螺仪输出的星敏感器角速度信息,为每颗恒星建立单独的跟踪通道滤波器,以星点质心坐标的运动模型为状态方程,并以星点质心提取结果作为量测量,对星点质心坐标进行估计与跟踪,能够提高星点质心估计精度,从而为组合导航滤波器提供更加精确的量测信息,提高系统的导航精度;
81、(2)利用跟踪通道滤波器不仅可以输出高精度的星点质心坐标,为组合导航滤波器提供量测量,还可以输出每颗恒星星点质心坐标的估计均方误差阵,使得组合导航滤波器能够根据每颗恒星的测量精度分配不同的权重,自适应调整组合导航滤波器的量测噪声协方差矩阵,从而提高系统在强噪声环境下的导航性能;
82、(3)通过跟踪通道滤波器的一步预测步骤,星敏感器可以预测恒星在当前星图中的成像位置;从而在每个预测星点位置附近区域内进行星点质心提取,避免对全图进行阈值扫描,提高星点质心提取速度,并降低将噪声尖峰等提取为假星的概率,从而改善组合导航系统的实时性。
- 还没有人留言评论。精彩留言会获得点赞!