一种无人机航迹优化方法、装置以及无人机控制系统与流程
本申请涉及电力领域,具体涉及一种无人机航迹优化方法、装置以及无人机控制系统。
背景技术:
1、在电力巡检场景中,可以采用无人机在进行更为高效的巡检任务,通过无人机进行现场图像的采集,来为后方基于图像处理的巡检分析提供数据依据。
2、目前无人机通过提前预设飞行航线执行任务航线,在给定的航线轨迹结合实时定位来检测地理位置进行航线的拍摄,飞行误差在3-5米。此外,还有一种实时动态(realtime kinematic,rtk)技术,通过一个安装在地面的基准站和一个安装在无人机上的流动站,根据的实时差分观测值来实现厘米级定位。
3、但是,本申请发明人也发现,rtk技术实现需要一直保持基准站和流动站的数据交换,由于户外复杂的电力巡检场景并不能像城市里通信方便,难以一直保持基准站和流动站之间的通讯,具体工作中时常出现基准站和流动站的通讯中断,差分定位也会随着基准站和流动站之前通讯的中断而无法实现,从而定位精度也会随之下降,影响了无人机飞行任务的执行。
技术实现思路
1、本申请提供了一种无人机航迹优化方法、装置以及无人机控制系统,对无人机航迹的调整提供了一种更为精确且便捷的航迹优化方案,从而有利于保障电力巡检场景中高效且精确的无人机巡检效果。
2、第一方面,本申请提供了一种无人机航迹优化方法,方法包括:
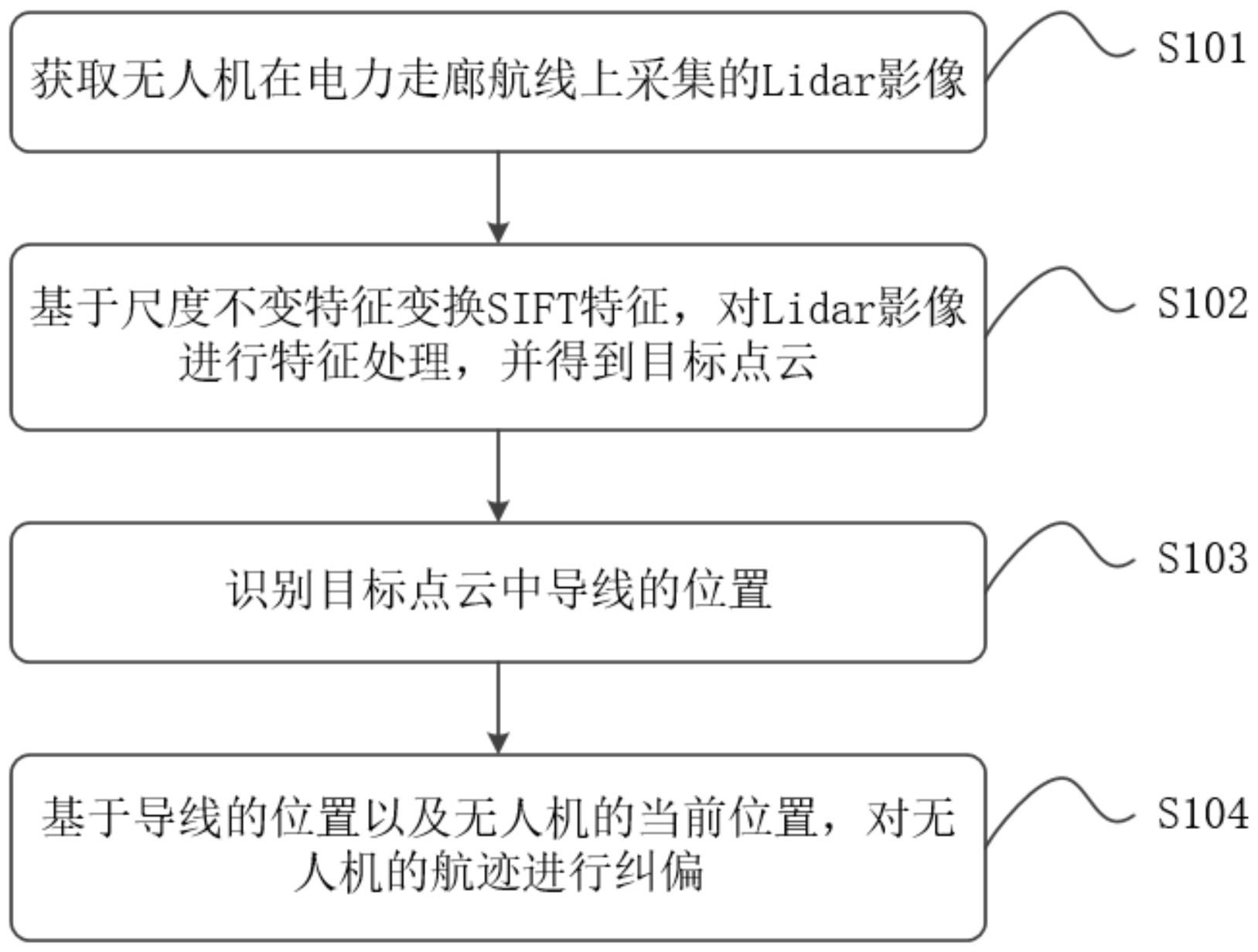
3、获取无人机在电力走廊航线上采集的lidar影像;
4、基于尺度不变特征变换sift特征,对lidar影像进行特征处理,并得到目标点云;
5、识别目标点云中导线的位置;
6、基于导线的位置以及无人机的当前位置,对无人机的航迹进行纠偏。
7、第二方面,本申请提供了一种无人机航迹优化装置,装置包括:
8、获取单元,用于获取无人机在电力走廊航线上采集的lidar影像;
9、处理单元,用于基于尺度不变特征变换sift特征,对lidar影像进行特征处理,并得到目标点云;
10、识别单元,用于识别目标点云中导线的位置;
11、纠偏单元,用于基于导线的位置以及无人机的当前位置,对无人机的航迹进行纠偏。
12、第三方面,本申请提供了一种无人机控制系统,包括处理器和存储器,存储器中存储有计算机程序,处理器调用存储器中的计算机程序时执行本申请第一方面或者本申请第一方面任一种可能的实现方式提供的方法。
13、第四方面,本申请提供了一种计算机可读存储介质,计算机可读存储介质存储有多条指令,指令适于处理器进行加载,以执行本申请第一方面或者本申请第一方面任一种可能的实现方式提供的方法。
14、从以上内容可得出,本申请具有以下的有益效果:
15、针对电力巡检场景,本申请在获取到无人机在电力走廊航线上采集的lidar影像后,基于尺度不变特征变换sift特征,对lidar影像进行特征处理,并得到目标点云;接着识别该目标点云中导线的位置,并基于导线的位置以及无人机的当前位置,对无人机的航迹进行纠偏,在该处理过程中,借助尺度不变特性变换匹配sift算法使用少量的影像信息可以快速创建三维模型的优点,并将其与无人机巡检技术相结合,加强对视觉信息和图片数据进行三维重建与地图构建的效果,可以获得更为精确的三维模型数据,如此对于导线目标来说视觉的精准匹配跟踪进可以促使实时优化无人机的航迹,进而有利于保障电力巡检场景中高效且精确的无人机巡检效果。
技术特征:
1.一种无人机航迹优化方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于尺度不变特征变换sift特征,对所述lidar影像进行特征处理的过程中,包括以下内容:
3.根据权利要求1所述的方法,其特征在于,所述识别所述目标点云中导线的位置之前,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,所述识别所述目标点云中导线的位置的过程中,包括以下内容:
5.根据权利要求1所述的方法,其特征在于,所述识别所述目标点云中导线的位置的过程中,包括以下内容:
6.根据权利要求5所述的方法,其特征在于,所述基于所述导线的位置以及所述无人机的当前位置,对所述无人机的航迹进行纠偏的过程中,包括以下内容:
7.根据权利要求1所述的方法,其特征在于,所述识别所述目标点云中导线的位置之前,所述方法还包括:
8.一种无人机航迹优化装置,其特征在于,所述装置包括:
9.一种无人机控制系统,其特征在于,包括处理器和存储器,所述存储器中存储有计算机程序,所述处理器调用所述存储器中的计算机程序时执行如权利要求1至7任一项所述的方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行权利要求1至7任一项所述的方法。
技术总结
本申请提供了一种无人机航迹优化方法、装置以及无人机控制系统,对无人机航迹的调整提供了一种更为精确且便捷的航迹优化方案,从而有利于保障电力巡检场景中高效且精确的无人机巡检效果。本申请提供的无人机航迹优化方法,包括:获取无人机在电力走廊航线上采集的Lidar影像;基于尺度不变特征变换SIFT特征,对Lidar影像进行特征处理,并得到目标点云;识别目标点云中导线的位置;基于导线的位置以及无人机的当前位置,对无人机的航迹进行纠偏。
技术研发人员:唐兴智,周妙林,凌飞,江万寿,杨成城,黄伟,江聪世,吴飞,粟骏龙,陈晓健,王进米,刘扬,唐潮
受保护的技术使用者:广东数字生态科技有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!