一种提高光纤陀螺仪测量精度的方法及装置与流程
本发明涉及光学陀螺,尤其涉及一种提高光纤陀螺仪测量精度的方法及装置。
背景技术:
1、光纤陀螺作为全固态光学陀螺,在现代惯导系统中有着广泛的应用,并向着高精度方向发展。标度因数是光纤陀螺测试中的重要参数之一,高性能的光纤陀螺需要在整个动态测量范围内都具有良好的测量精度,光纤陀螺精度直接受到标度因数误差的影响,因此对光纤陀螺标度因数的测试评估是光纤陀螺性能测试中必不可少的一部分。
2、传统的光纤陀螺标度因数参数的测试方法中,在旋转角速率测试点下要求转台连续旋转,对转台的输出速率的稳定性有很高的要求,尤其对于高精度光纤陀螺,转台输出速率的要求对测试结果影响更大。
技术实现思路
1、本发明实施例提供了一种提高光纤陀螺仪测量精度的方法及装置,解决了现有技术中要求转台连续旋转,对转台的输出速率以及稳定性有很高的要求的问题,实现提高光纤陀螺仪的标度因数测量精度的技术效果。
2、根据本发明的一方面,提供了一种提高光纤陀螺仪测量精度的方法,其中,包括:
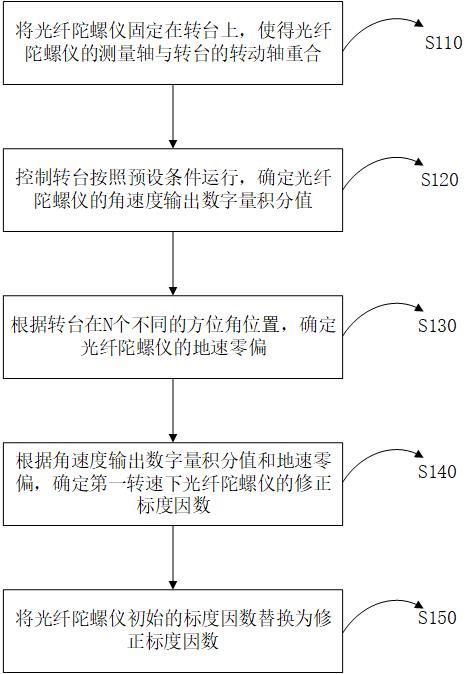
3、将光纤陀螺仪固定在转台上,使得所述光纤陀螺仪的测量轴与所述转台的转动轴重合;
4、控制所述转台按照预设条件运行,确定所述光纤陀螺仪的角速度输出数字量积分值;
5、根据所述转台在n个不同的方位角位置,确定所述光纤陀螺仪的地速零偏;
6、根据所述角速度输出数字量积分值和所述地速零偏,确定第一转速下所述光纤陀螺仪的修正标度因数;
7、将所述光纤陀螺仪初始的标度因数替换为所述修正标度因数;
8、其中,所述第一转速为所述转台按照预设条件运行时的最大转速,n≥4且n为偶数。
9、可选的,在将所述光纤陀螺仪初始的标度因数替换为所述修正标度因数之前,还包括:
10、确定多个不同转速下对应的所述光纤陀螺仪的修正标度因数;
11、根据所述转速与所述修正标度因数的对应关系拟合转速-修正标度因数曲线,确定与任意转速的对应的修正标度因数。
12、可选的,所述控制所述转台按照预设条件运行,确定所述光纤陀螺仪的角速度输出数字量积分值,包括:
13、在所述转台静止状态下,定义此时所述转台方位角位置为,采集所述光纤陀螺仪的角速度输出数字量,数据采集启动时刻为,采集持续时间为;
14、控制所述转台从位置、时刻开始旋转,转速从0提高至第一转速,所述转台旋转m圈后停止在位置,数据采集持续时间为,m为正整数;
15、继续采集所述光纤陀螺仪的角速度输出数字量,采集持续时间为,在时刻停止采集;
16、根据预设的角速度输出数字量采样频率f,计算角速度输出数字量积分值。
17、可选的,所述根据预设的角速度输出数字量采样频率f,计算角速度输出数字量积分值,包括:
18、检查数据采集过程中所采集的数据并确认是否丢帧;
19、若否,采集数字量的个数为,计算角速度输出数字量积分值。
20、可选的,在检查数据采集过程中所采集的数据并确认是否丢帧之后,还包括:
21、若是,先根据丢帧前后的数据进行插值,将插值结果填充至采集数据的丢帧位置后再计算角速度输出数字量积分值。
22、可选的,所述角速度输出数字量积分值的测量精度越高,m的取值越大。
23、可选的,所述根据所述转台在n个不同的方位角位置,确定所述光纤陀螺仪的地速零偏,包括:
24、定义所述转台n个不同的方位角位置,分别为、、……、,相邻位置的夹角为360°/n;
25、控制所述转台旋转至位置,测量位置处所述光纤陀螺仪的静态数字输出量,测量持续时间为,并计算所述光纤陀螺仪在位置对地球转速的静态数字输出量的平均值;
26、依次测量其它n-1个方位角位置处所述光纤陀螺仪对地球转速的静态数字输出量的平均值、、……、,计算n个方位角位置处所述光纤陀螺仪对地球转速的静态数字输出量的平均值,即为所述地速零偏。
27、可选的,所述根据所述角速度输出数字量积分值和所述地速零偏,确定第一转速下所述光纤陀螺仪的修正标度因数,包括:
28、根据下式确定所述修正标度因数:
29、。
30、可选的,在确定所述地速零偏时,在测量每个转速时进行重新测量以纠正所述光纤陀螺仪所测量的地速零偏变化。
31、根据本发明的另一方面,提供了一种提高光纤陀螺仪测量精度的装置,其中,包括:
32、转台,用于承载光纤陀螺仪,所述光纤陀螺仪的测量轴与所述转台的转动轴重合;
33、角速度输出数字量积分值确定模块,用于控制所述转台按照预设条件运行,确定所述光纤陀螺仪的角速度输出数字量积分值;
34、地速零偏确定模块,用于根据所述转台在n个不同的方位角位置,确定所述光纤陀螺仪的地速零偏;
35、标度因数修正模块,用于根据所述角速度输出数字量积分值和所述地速零偏,确定第一转速下所述光纤陀螺仪的修正标度因数;
36、替换模块,用于将所述光纤陀螺仪初始的标度因数替换为所述修正标度因数;
37、其中,所述第一转速为所述转台按照预设条件运行时的最大转速,n≥4且n为偶数。
38、本发明实施例提供的一种提高光纤陀螺仪测量精度的方法及装置,通过控制转台按照预设条件运行,确定光纤陀螺仪的角速度输出数字量积分值,并通过转台在n个不同的方位角位置,确定光纤陀螺仪的地速零偏,进而通过角速度输出数字量积分值和地速零偏,确定第一转速下光纤陀螺仪的修正标度因数,进而将初始的标度因数替换为修正标度因数,解决了现有技术中转台连续旋转,对转台的输出速率以及稳定性有很高的要求的问题,实现提高光纤陀螺仪的标度因数测量精度的技术效果。
39、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种提高光纤陀螺仪测量精度的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在将所述光纤陀螺仪初始的标度因数替换为所述修正标度因数之前,还包括:
3.根据权利要求1所述的方法,其特征在于,所述控制所述转台按照预设条件运行,确定所述光纤陀螺仪的角速度输出数字量积分值,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据预设的角速度输出数字量采样频率f,计算角速度输出数字量积分值,包括:
5.根据权利要求4所述的方法,其特征在于,在检查数据采集过程中所采集的数据并确认是否丢帧之后,还包括:
6.根据权利要求3所述的方法,其特征在于,所述角速度输出数字量积分值的测量精度越高,m的取值越大。
7.根据权利要求3所述的方法,其特征在于,所述根据所述转台在n个不同的方位角位置,确定所述光纤陀螺仪的地速零偏,包括:
8.根据权利要求7所述的方法,其特征在于,所述根据所述角速度输出数字量积分值和所述地速零偏,确定第一转速下所述光纤陀螺仪的修正标度因数,包括:
9.根据权利要求7所述的方法,其特征在于,在确定所述地速零偏时,在测量每个转速时进行重新测量以纠正所述光纤陀螺仪所测量的地速零偏变化。
10.一种提高光纤陀螺仪测量精度的装置,其特征在于,包括:
技术总结
本发明实施例公开了一种提高光纤陀螺仪测量精度的方法及装置。其中,该方法包括:将光纤陀螺仪固定在转台上,使得光纤陀螺仪的测量轴与转台的转动轴重合;控制转台按照预设条件运行,确定光纤陀螺仪的角速度输出数字量积分值;根据转台在N个不同的方位角位置,确定光纤陀螺仪的地速零偏;根据角速度输出数字量积分值和地速零偏,确定第一转速下光纤陀螺仪的修正标度因数;将光纤陀螺仪初始的标度因数替换为修正标度因数;其中,第一转速为转台按照预设条件运行时的最大转速,N≥4且N为偶数。本发明的技术方案,解决了现有技术中转台连续旋转,对转台的输出速率以及稳定性有很高的要求的问题,实现提高光纤陀螺标度因数测量精度的技术效果。
技术研发人员:赵衍双,罗巍,金利民,刘伯晗,唐若祥
受保护的技术使用者:中国船舶集团有限公司第七〇七研究所
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!