一种对地三轴稳定观测卫星的磁强计在轨标定系统及标定方法与流程
本发明属于航空航天,具体地,涉及一种对地三轴稳定观测卫星的磁强计在轨标定系统及标定方法。
背景技术:
1、随着微电子技术的发展和卫星应用技术的成熟,微小卫星不仅能够实现传统大型航天器的功能,而且在设计灵活性、研制速度、研制成本和风险承受能力等方面也具有独特优势。目前,微小卫星技术被广泛应用于遥感、通信、导航、气象观测和科学试验等各个领域。
2、磁强计在实际工作中,地磁信号和各类误差信号耦合在一起,组成传感器输出,这将严重影响磁强计的精度。根据三轴磁强计的输出模型,可将外界干扰等效成三轴磁场数据的零偏误差和标度因数;三轴磁强计是卫星不可缺失的重要传感器,用于测量卫星所处环境的磁场强度大小和方向,在卫星长期稳定模式下可以完成姿态确定和动量卸载的任务,其性能关系着微小卫星在轨运行的稳定性和安全性。在传统卫星设计过程中,大多采用测量精度较高,稳定性较好的高精度磁强计。为了控制研制成本,微小卫星的姿态控制系统多采用质量轻、成本低的工业级磁强计。低成本的工业级磁强计由于自身性能的限制和相对较差的抗干扰能力,其测量的磁场信息存在一定的偏差,这导致卫星的动量卸载效率下降,以及双矢量姿态确定存在定姿偏差。
技术实现思路
1、针对长期工作于对地三轴稳定模式的微小卫星,本发明提出了一种对地三轴稳定观测卫星的磁强计在轨标定系统及标定方法,在卫星长期对地三轴稳定工作模式下,保证高效率的角动量卸载功能,并提供高精度的双矢量姿态确定信息,实现高指向精度和稳定度的控制。
2、本发明通过以下技术方案实现:
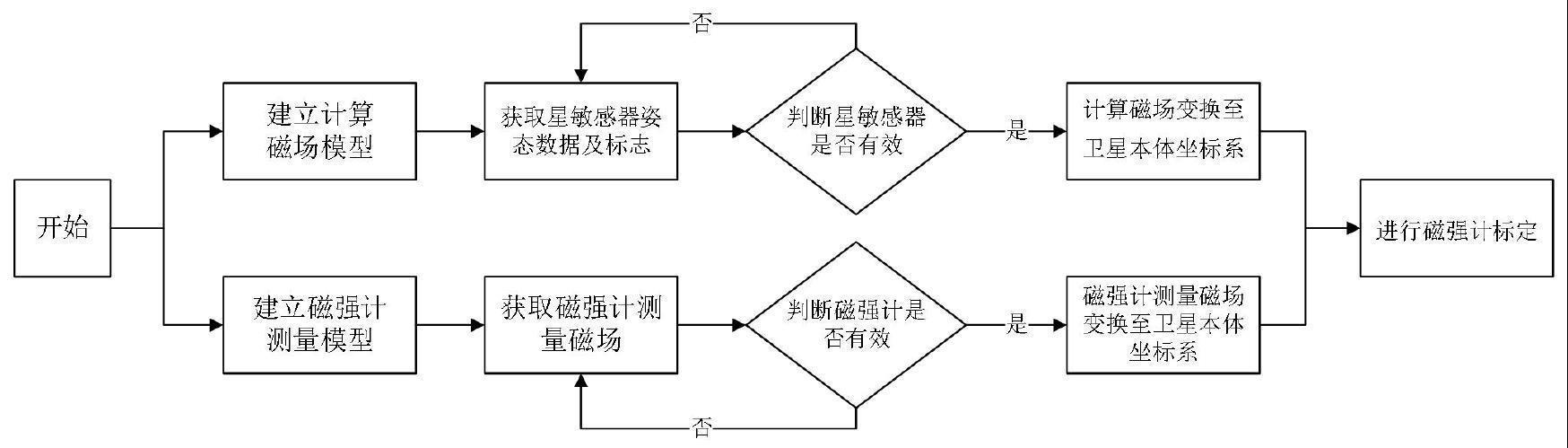
3、一种对地三轴稳定观测卫星的磁强计在轨标定方法:所述方法具体包括以下步骤:
4、步骤1,根据惯性坐标和卫星本体坐标,建立星载磁强计的测量模型;获取磁强计测量磁场,并判断磁强计是否有效,无效则重新获取测量磁场,有效则进行步骤2;
5、步骤2,建立星载计算磁场模型;获取星敏感器姿态数据及标志,判断星敏感器是否有效,无效则重新获取姿态数据及标志,有效则进行步骤3;
6、步骤3,将计算磁场变换至卫星本体坐标系;
7、步骤4,建立对地三轴稳定模式下的标定模型,将磁强计测量磁场变换至卫星本体坐标系;
8、步骤5,进行磁强计标定,最终得到测量标度系数k和测量偏差系数be的所有变量。
9、进一步地,在步骤1中,
10、定义fi表示惯性坐标系,fb表示卫星本体坐标系;构建工业级磁强计的测量模型为:
11、
12、式中:bm为3×1的向量,表示磁强计坐标系下的测量磁场强度;bb为3×1的向量,表示卫星本体坐标系下校准后的测量磁场强度;
13、ηm为3×1的向量,表示磁强计的测量随机噪声;k=diag(k1,k2,k3)为3×3矩阵,表示磁强计的测量标度系数;
14、b为3×1的向量,表示磁强计的测量偏差系数;为3×3矩阵,表示卫星惯性坐标系至本体坐标系的旋转变换矩阵;
15、将公式简化可以得到:
16、
17、令表示卫星本体坐标系下校准前的测量磁场强度;表示卫星本体坐标系下总的测量偏差系数;表示卫星本体坐标系下总的测量随机噪声;
18、根据上述定义,三轴磁强计的测量模型最终简化为:
19、bb=kbbm+be+ηbm (3)。
20、
21、进一步地,在步骤2中,
22、星载的计算磁场模型采用国际地磁场参考模型(international geomagneticreference field,igrf),在地面或上空的任意一点,由igrf模型将主磁场的标量位函数用球谐级数表示为:
23、
24、式中,a=6371.2km为地球平均半径,r为球体的参考中心到球体表面的计算点的距离,r=a+h,h为地程高;θ为地心余纬度;
25、λ为自格林尼治向东算起的经度;为经过标准化的施密特球谐系数,
26、为施密特准归一化n次m阶勒让德函数;
27、通过位场转换原理,可以将地磁场三个轴上的分量表示为以下形式:
28、
29、式中,及其一阶导数表示为:
30、
31、
32、假设通过igrf模型得到的卫星所处位置的惯性坐标系下的磁场强度为bir,则
33、
34、式中表示地心坐标系至惯性坐标系的转换矩阵,且存在随机测量噪声为ηir。
35、进一步地,在步骤3中,
36、卫星本体坐标系fb相对惯性坐标系fi的姿态表示为单位四元数并满足约束条件
37、惯性坐标系至卫星本体坐标系的旋转矩阵r(q)有如下关系:
38、
39、式中,
40、则计算磁场在卫星本体坐标系下的分量bbc为:
41、bbc=r(q)(bir+ηir) (10)
42、定义bbr=r(q)bir,ηbr=r(q)ηir,则计算磁场的最终简化为:
43、bbc=bbr+ηbr (11)。
44、
45、进一步地,在步骤4中,
46、采用递推最小二乘法对磁强计的参数进行标定,根据公式和(11)可以得到:
47、
48、式中:η=ηbm-ηbr;
49、向量bbr,bbm,be,η和矩阵k具体展开形式为:
50、
51、根据公式(12)和(13)可以得到:
52、
53、进一步地,在步骤5中,
54、根据公式(14),定义如下变量:
55、
56、使用最下最小二乘法对变量x进行估计:
57、
58、分别令x=[k21 k22 k23 be2]t,y=bbr2和x=[k31 k32 k33 be3]t,y=bbr3,对变量x进行估计,最终可以估计得到测量标度系数k和测量偏差系数be的所有变量。
59、一种对地三轴稳定观测卫星的磁强计在轨标定系统:
60、所述系统包括磁强计测量模块、星载计算磁场模块、磁场换算模块和磁强计标定模块;
61、所述磁强计测量模块,根据惯性坐标和卫星本体坐标,建立星载磁强计的测量模型;获取磁强计测量磁场,并判断磁强计是否有效,无效则重新获取测量磁场,有效则进行步骤2;
62、所述星载计算磁场模块,用于建立星载计算磁场模型;获取星敏感器姿态数据及标志,判断星敏感器是否有效,无效则重新获取姿态数据及标志,有效则进行步骤3;
63、所述磁场换算模块,用于建立对地三轴稳定模式下的标定模型,将计算磁场变换至卫星本体坐标系;将磁强计测量磁场变换至卫星本体坐标系;
64、所述磁强计标定模块,用于进行磁强计标定,最终得到测量标度系数k和测量偏差系数be的所有变量。
65、一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
66、一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时实现上述方法的步骤。
67、本发明有益效果
68、本发明所提出的方法重点解决了三方面的问题:一是建立了对地三轴稳定模式下的磁强计标定模型,使用递推最小二乘法对磁强计进行准确的标定;二是通过磁强计的标定,保证了卫星平台高效率的卸载功能;三是以国际地磁场参考模型为参考基准来进行标定后可以得到准确、无明显偏差的双矢量姿态确定信息。
69、本发明能够在对地三轴稳定模式下对磁强计进行实时标定。一方面能够在一定程度上提升角动量卸载效率,另一方面结合数字太阳敏感器的测量信息,能够提供精准的双矢量姿态确定。本发明对微小卫星实现高性能在轨任务,保证在轨安全运行具有重要的工程应用价值。
70、本发明的控制方法结构简单,易于实现,能够应用于工程实际中;能够在卫星对地三轴稳定模式下,实现对低成本工业级磁强计的在轨标定。
- 还没有人留言评论。精彩留言会获得点赞!