适用于中小型固定翼无人机的气流传感器
本发明涉及无人机传感器的领域,尤其是涉及适用于中小型固定翼无人机的气流传感器。
背景技术:
1、迎角是固定翼无人机翼弦与相对风速之间的夹角,而迎角会直接影响到无人机飞行的稳定,目前广泛应用的迎角传感器主要是机械式与气动式,机械式传感器通过探头转动来测量迎角的大小,比如风标式传感器和归零压差式传感器;气动式传感器则是通过测量飞行过程中的压力值得到迎角大小,比如差比传感器。
2、为了提升飞机飞行的稳定性,在有人机上通常会安装多种气流传感器来获得大气数据,但有人机和大型无人机飞行速度较快,所使用的角度传感器所工作的空速环境并不适合小型无人机。小型固定翼无人机通常工作在中低空环境,中低空气流流动复杂,地面起伏的山脉都会影响到中低空的气流;因此在复杂大气环境中工作的中小型固定翼无人机,需要获得更加全面的大气数据来提升飞行的稳定性。而当前中小型无人机获得大气数据的方式比较单一,主要是通过空速管以及气压计来获得空速以及飞行高度的数据,缺少迎角数据。
3、然而:1)、市面上缺少适用于中小型固定翼无人机的迎角传感器的成品;2)、中小型无人机载重和空间都有限,应用在大型无人机以及有人机上的迎角传感器对于小型无人机过于笨重,且不便于安装在小型无人机上;3)、安装在有人机和大型无人机上的迎角传感器的工作空速环境并不适合低速的小型无人机;4)、对于小型无人机安装现有的迎角传感器成本较高;因此本发明提出适用于中小型固定翼无人机的气流传感器,以解决上述问题。
技术实现思路
1、为了解决现有有人机迎角传感器和小型无人机迎角传感器之间无法互通使用的问题,本发明提供适用于中小型固定翼无人机的气流传感器。
2、本发明提供的适用于中小型固定翼无人机的气流传感器采用如下的技术方案:
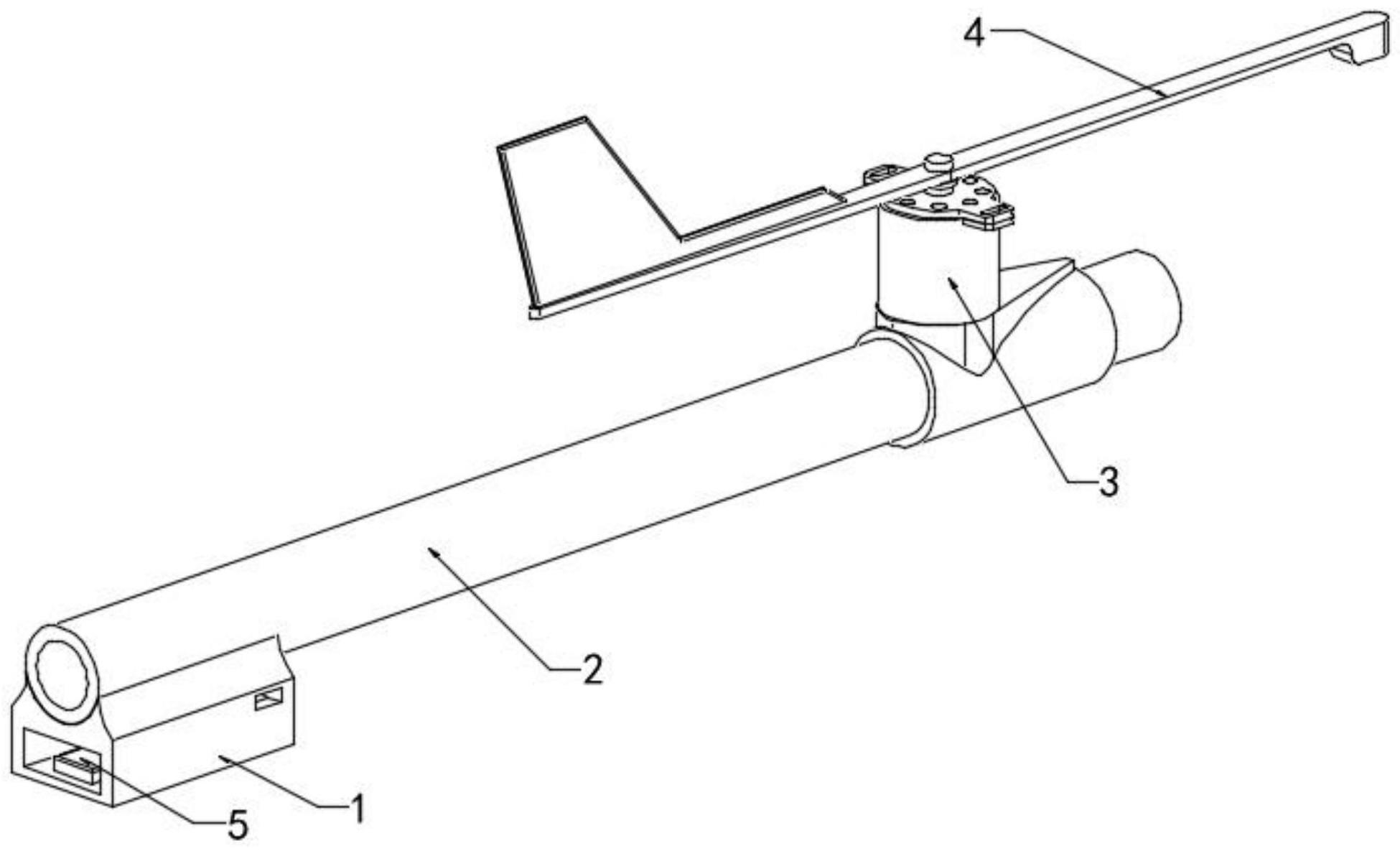
3、适用于中小型固定翼无人机的气流传感器,包括风标,所述风标的下方设置有霍尔角度传感器,霍尔角度传感器的转轴和风标的重心位置固定连接;
4、所述霍尔角度传感器的一侧设置有与无人机机头位置固定连接的底座,且底座的内部固定连接有与霍尔角度传感器电性连接的单片机模块,所述霍尔角度传感器和底座之间通过延长杆固定连接,所述延长杆将风标固定于远离无人机机体位置;
5、所述霍尔角度传感器输出电压为vcc/2时,霍尔角度传感器对应的角度为0°,输出电压≠vcc/2时,角度取正值或负值;
6、所述单片机模块采集、处理霍尔角度传感器的角度数据,并将采集、处理后信号,通过卡尔曼滤波算法进行处理,所述卡尔曼滤波算法中设置阈值,滤除坏值;
7、处理后的角度数据通过串口发送,所述角度数据作为无人机控制器的角度数据。
8、优选的,所述霍尔角度传感器输出电压>vcc/2时,角度取正值,所述霍尔角度传感器输出电压<vcc/2时,角度取负值。
9、优选的,所述风标尾翼厚度为2mm-3mm。
10、优选的,所述风标带动霍尔角度传感器转轴旋转,霍尔角度传感器将转动角度转换为电信号,霍尔角度传感器的输出电压变化,所述单片机模块上adc外设采集霍尔角度传感器的输出电压,并转换为数字信号;
11、所述单片机模块对数字信号进行处理包括如下步骤:通过单片机软件编程,使用卡尔曼滤波算法处理采集信号,再通过单片机上串口发送处理后的角度数据,该角度数据通过无人机通过串口接收处接收后,供无人机控制器使用。
12、优选的,在所述卡尔曼滤波算法中,增加阈值,当瞬时角度的改变超过阈值时,将产生的角度数据滤除,减小风标受乱流的影响。
13、优选的,所述串口通信为通用异步收发传输器,通用异步收发传输器双方接rx、tx和gnd三根线,其中:tx用于发送数据,rx用于接受数据,gnd接地,双方收发交叉对接,支持全双工方式。
14、本发明还提供了固定翼无人机气流传感器对飞行姿态的修正方法采用的技术方案:
15、小型固定翼无人机的飞行控制主要是由飞行控制器完成,飞行控制器通过控制操作各个舵面(副翼,升降舵面,方向舵面)实现调整飞行姿态;其控制方法就是根据当前无人机的飞行姿态,将pwm值输出至各操作舵面的舵机从而实现操作舵面来调整飞行姿态;在整个无人机飞行过程中飞行控制器起主要控制作用,本发明中的单片机仅用于处理和发送数据,飞行控制器通过接收单片机发送的数据来感知当前无人机的迎角来丰富飞行控制器所能采集的大气数据;因此可以在飞行控制器中添加新的控制逻辑,来修正飞控对于舵面的控制,即修正无人机的姿态控制,从而提高飞行的稳定性;
16、固定翼无人机气流传感器对飞行姿态的修正方法,包括如下步骤:
17、s1、读取无人机舵机pwm中位值;
18、s2、读取所述霍尔角度传感器测得的迎角数据a;
19、s3、无人机保持平飞所需的舵面正迎角b;
20、s4、读取飞行控制器输出给升降舵机pwm值并减去pwm中位值作为控制量c;
21、s5、当无人机抬头时,将a*k数值叠加到pwm中位值上;
22、s6、叠加b和c,输出该pwm值给升降舵面的舵机。
23、综上所述,本发明包括以下至少一种有益技术效果:
24、1)本发明的结构和外形设计主要满足小型固定翼无人机的使用,使用小巧霍尔角度传感器能够减小本发明的尺寸和重量,同时具有较高的可靠性,在较为恶劣的环境、以及在较低空速下也对气流的变化十分敏感,具有较高的精度,使用延长杆使得风标能够远离机体,一方面是为了减小无人机动力装置对气舵面的影响,另一方面小型无人的机体侧面安装位置有限,提升安装便捷性;
25、2)本发明将单片机与角度传感器结合,使用滤波算法处理数据的同时,增加阈值判断滤除掉坏值,输出处理后的传感器信号而非直接输出传感器的原始信号,进一步保证了传感器信号的精度和稳定性;
26、3)本发明通过测量小型固定翼无人机的迎角,使得小型无人机所使用的飞行控制器能够感知无人机的迎角丰富所能采集大气数据的同时,也为飞控增加了一种修正飞行姿态的控制逻辑,进一步丰富了本发明的适用范围。
技术特征:
1.适用于中小型固定翼无人机的气流传感器,其特征在于:包括风标(4),所述风标(4)的下方设置有霍尔角度传感器(3),霍尔角度传感器(3)的转轴和风标(4)的重心位置固定连接;
2.根据权利要求1所述的适用于中小型固定翼无人机的气流传感器,其特征在于:所述霍尔角度传感器(3)输出电压>vcc/2时,角度取正值,所述霍尔角度传感器(3)输出电压<vcc/2时,角度取负值。
3.根据权利要求1所述的适用于中小型固定翼无人机的气流传感器,其特征在于:所述风标(4)尾翼厚度为2mm-3mm。
4.根据权利要求1所述的适用于中小型固定翼无人机的气流传感器,其特征在于:所述风标(4)带动霍尔角度传感器(3)转轴旋转,霍尔角度传感器(3)将转动角度转换为电信号,霍尔角度传感器(3)的输出电压变化,所述单片机模块(5)上adc外设采集霍尔角度传感器(3)的输出电压,并转换为数字信号;
5.根据权利要求1所述的适用于中小型固定翼无人机的气流传感器,其特征在于:在所述卡尔曼滤波算法中,增加阈值,当瞬时角度的改变超过阈值时,将产生的角度数据滤除,减小风标(4)受乱流的影响。
6.根据权利要求5所述的适用于中小型固定翼无人机的气流传感器,其特征在于:所述串口通信为通用异步收发传输器,通用异步收发传输器双方接rx、tx和gnd三根线,其中:tx用于发送数据,rx用于接受数据,gnd接地,双方收发交叉对接,支持全双工方式。
7.固定翼无人机气流传感器对飞行姿态的修正方法,其特征在于:包括如下步骤:
技术总结
本发明涉及无人机传感器技术领域,且公开了适用于中小型固定翼无人机的气流传感器,包括风标,所述风标的下方设置有霍尔角度传感器;所述霍尔角度传感器的一侧设置有与之配合的单片机模块;所述单片机模块采集、处理霍尔角度传感器的数据,并将采集、处理后信号,通过卡尔曼滤波算法进行处理,所述卡尔曼滤波算法中设置阈值,滤除坏值;处理后的角度数据通过串口发送,作为无人机控制器的角度数据,本方案,使用具有较高的可靠性的霍尔角度传感器能够减小本发明的尺寸和重量,在较为恶劣的环境、以及在较低空速下也对气流的变化十分敏感,具有较高的精度;本发明将单片机与角度传感器结合,保证了传感器信号的精度和稳定性。
技术研发人员:李小蕴,游朝圳,吴钰桐,熊安康,荣骏一,陈昕然
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!