用于导航精度测试的工装、包括该工装的装置以及测试导航精度的方法与流程
本发明涉及医疗器械,尤其涉及导航精度测试工装、包括该工装的导航精度测试装置以及导航精度测试方法。
背景技术:
1、当前,在医疗手术中存在在术中无法直接观察到手术器械作用部位的问题。为了减低手术过程透视剂量,增大手术的可靠性,可通过导航方式对手术节段及手术器械进行显示,辅助手术的进展。
2、现有的骨科手术导航过程例如可以通过cn 113199510 a获知,包括如下操作:通过对患者进行ct扫描,获得图像数据;然后,计算机对图像数据进行三维重建,获得患者虚拟模型;利用配准算法以及光学追踪设备,获得虚拟模型与患者在光学追踪设备坐标系中的关系,将虚拟模型与患者进行配准,配准成功后,系统形成导航图形,手术导航机器人或者操作人员利用执行工具可以基于导航图像进行手术操作。
3、手术导航系统的运行精度非常重要,因此,需要对手术导航系统的精度进行检验,以保证系统的精度能满足要求。
技术实现思路
1、本发明的一个目的旨在解决现有技术中存在的上述问题和缺陷的至少一者。
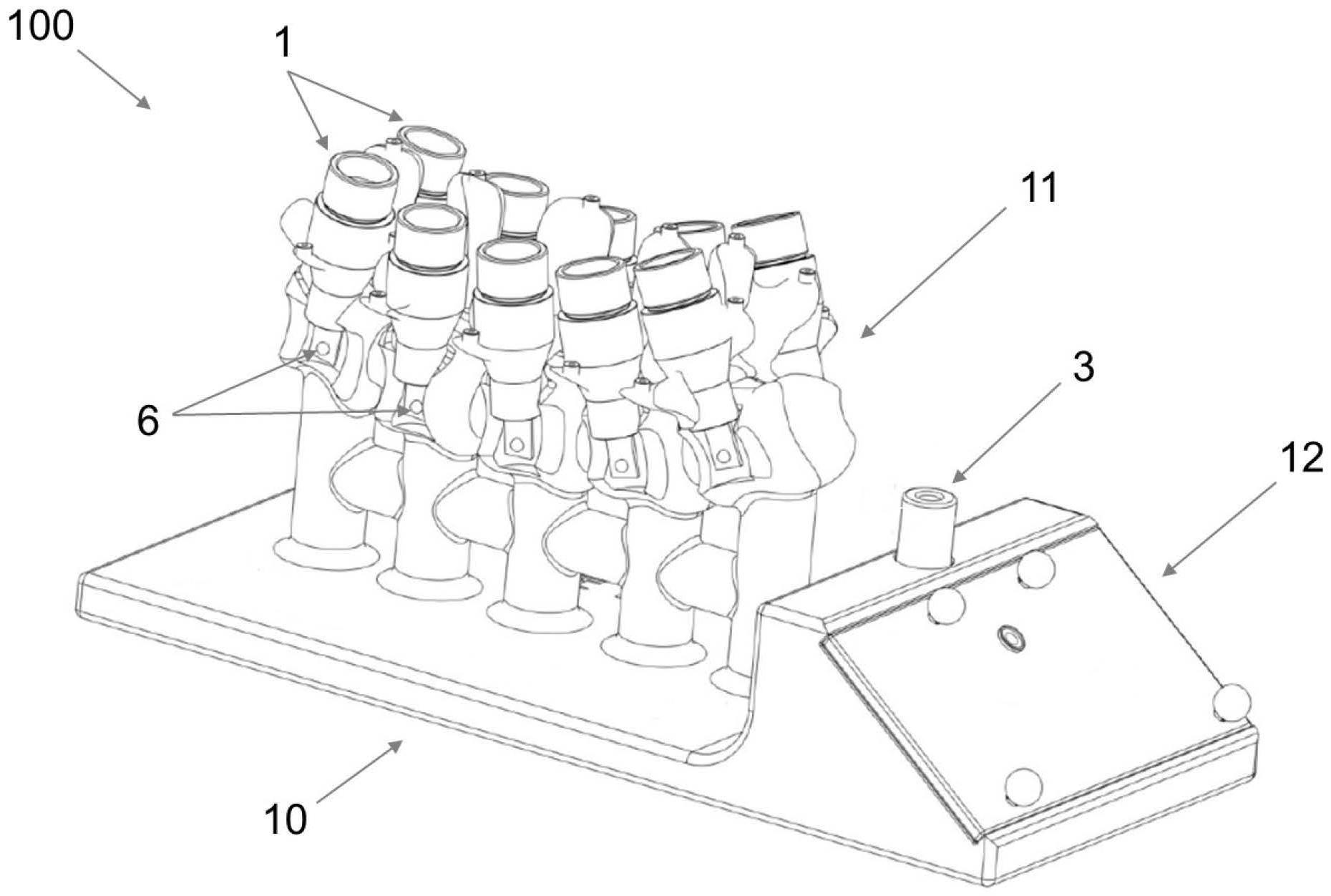
2、根据本发明的一个方面,提供了一种用于导航精度测试的工装,所述工装包括:工装载体,布置在工装载体上的模体部分,布置在工装载体的一个端部上的追踪器,以及能与模体部分可拆卸地连接的至少一个导航定位目标。
3、可选地,追踪器包括用于安装反光球的多个安装部。
4、可选地,追踪器还包括器械验证槽。
5、可选地,导航定位目标是由能显影的材料制成的单件。
6、或者,可选地,导航定位目标包括承载构件和设置在所述承载构件上的至少一个显影球。
7、可选地,承载构件可以包括上部区段、下部区段和位于上部区段与下部区段之间的中间区段,显影球可以分别设置在上部区段和下部区段中。
8、可选地,单件或承载构件的中间区段包括螺纹部,导航定位目标能借助于所述螺纹部以螺纹连接方式固定到模体部分中的相应的配合部中。
9、可选地,单件或承载构件的中间区段设有突起或沟槽,并且模体部分的配合部设有对应的沟槽或突起,使得导航定位目标能借助于突起与沟槽的协作而固定到模体部分的相应的配合部中;或者,单件或承载构件的中间区段设有销钉或销钉孔,并且模体部分的配合部设有对应的销钉孔或销钉,使得导航定位目标能借助于销钉与销钉孔的协作而固定到模体部分的相应的配合部中。
10、可选地,上部区段包括凹腔,上部区段中的显影球定位在所述凹腔的底部。
11、可选地,下部区段包括具有平坦的侧表面的侧凹部,下部区段中的显影球定位在所述侧凹部的侧表面上,从而在导航定位目标的连接状态下,下部区段中的显影球朝向工装的外部并且向外露出。
12、可选地,模体部分包括多个检测标记,所述检测标记形成为凹坑部。
13、可选地,所述工装还包括用于固定附加部件的安装台。
14、可选地,所述附加部件是另外的追踪器。
15、可选地,所述模体部分复刻人体的椎体结构。
16、可选地,所述模体部分由可透x射线的高分子材料并且利用3d打印方式制成。
17、根据本发明的另一方面,还提供一种用于导航精度测试的装置,所述装置包括手术器械、器械追踪器以及前述的用于导航精度测试的工装。
18、根据本发明的又一方面,还提供一种利用前述的用于导航精度测试的装置测试导航精度的方法,所述方法包括以下步骤:a)利用坐标测量仪测量工装的导航定位目标的坐标,其中,导航定位目标与工装的模体部分处于连接状态;b)提供工装的3d模型并且进行所述3d模型的配准注册;c)根据导航定位目标的显影在导航软件界面中确定植入物的计划位置;d)在将导航定位目标从工装的模体部分拆卸之后,利用手术器械将植入物植入工装的模体部分中,并且在需要时调节工装和植入物的空间位置以使得植入物被导航至计划位置;e)在步骤d)之后,基于步骤a)中所使用的同一坐标测量仪测量植入物的坐标;以及f)比较在步骤a)中与在步骤e)中分别测得的坐标,从而确定导航误差,所述导航误差包括位置误差和/或角度误差。
19、可选地,步骤a)可以在步骤b)之前、也可以在步骤b)之后执行。
20、利用根据本发明的工装、装置和方法,能够准确地评价导航系统的导航精度。
技术特征:
1.一种用于导航精度测试的工装(100),其特征在于,所述工装包括:
2.根据权利要求1所述的用于导航精度测试的工装(100),其中,追踪器(12)包括用于安装反光球(2)的多个安装部(7)。
3.根据权利要求1所述的用于导航精度测试的工装(100),其中,追踪器(12)还包括器械验证槽(4)。
4.根据权利要求1所述的用于导航精度测试的工装(100),其中,导航定位目标(1)是由能显影的材料制成的单件。
5.根据权利要求1所述的用于导航精度测试的工装(100),其中,导航定位目标(1)包括承载构件和设置在所述承载构件上的至少一个显影球(6)。
6.根据权利要求5所述的用于导航精度测试的工装(100),其中,所述承载构件包括上部区段(1a)、下部区段(1c)和位于上部区段与下部区段之间的中间区段,显影球(6)分别设置在上部区段(1a)和下部区段(1c)中。
7.根据权利要求4或6所述的用于导航精度测试的工装(100),其中,所述单件或所述承载构件的中间区段包括螺纹部(1b),导航定位目标(1)能借助于所述螺纹部(1b)以螺纹连接方式固定到模体部分(11)中的相应的配合部中。
8.根据权利要求4或6所述的用于导航精度测试的工装(100),其中,
9.根据权利要求6所述的用于导航精度测试的工装(100),其中,上部区段(1a)包括凹腔,上部区段中的显影球(6)定位在所述凹腔的底部。
10.根据权利要求6所述的用于导航精度测试的工装(100),其中,下部区段(1c)包括具有平坦的侧表面的侧凹部,下部区段中的显影球(6)定位在所述侧凹部的侧表面上,从而在导航定位目标(1)的连接状态下,下部区段中的显影球(6)朝向工装的外部并且向外露出。
11.根据权利要求1至6中任一项所述的用于导航精度测试的工装(100),其中,模体部分(11)包括多个检测标记(5),所述检测标记(5)形成为凹坑部。
12.根据权利要求1至6中任一项所述的用于导航精度测试的工装(100),还包括用于固定附加部件的安装台(3)。
13.根据权利要求12所述的用于导航精度测试的工装(100),其中,所述附加部件是另外的追踪器。
14.根据权利要求1至6中任一项所述的用于导航精度测试的工装(100),其中,所述模体部分(11)复刻人体的椎体结构。
15.根据权利要求1至6中任一项所述的用于导航精度测试的工装(100),其中,所述模体部分(11)由可透x射线的高分子材料并且利用3d打印方式制成。
16.一种用于导航精度测试的装置,其特征在于,所述装置包括手术器械、器械追踪器(30)以及根据权利要求1-15中任一项所述的用于导航精度测试的工装(100)。
17.一种利用根据权利要求16所述的用于导航精度测试的装置测试导航精度的方法,其特征在于,所述方法包括以下步骤:
18.根据权利要求17所述的方法,其中,步骤a)在步骤b)之前或之后执行。
技术总结
本发明涉及一种用于导航精度测试的工装(100),所述工装包括:工装载体(10),布置在工装载体(10)上的模体部分(11),布置在工装载体(10)的一个端部上的追踪器(12),以及能与模体部分(11)可拆卸地连接的多个导航定位目标(1)。本发明还提供一种包括所述工装(100)的用于导航精度测试的装置,以及利用该装置测试导航精度的方法。
技术研发人员:彭婧华,刘秋真,潘昕荻
受保护的技术使用者:常州市康辉医疗器械有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!