地图更新方法、地图更新装置、自移动设备及存储介质与流程
本申请属于地图构建,尤其涉及一种地图更新方法、地图更新装置、自移动设备及计算机可读存储介质。
背景技术:
1、随着机器的智能化,自移动设备逐渐融入了日常的生产生活中,目前自移动设备可应用于家庭、商场、工厂及户外等多种场景。在不同的场景下,自移动设备可先根据作业要求规划可通行的移动路线,而后基于该移动路线实现自移动,以完成相应作业。
2、为了规划得到符合场景地形的移动路径,自移动设备在移动路径规划前,可先构建作业区域的障碍地图,以保证规划得到的移动路径能够避开作业区域内的障碍物。然而,在障碍物地图构建的过程中,容易将动态障碍物识别为静态障碍物,使得得到的障碍物地图的准确率偏低。
技术实现思路
1、本申请提供了一种地图更新方法、地图更新装置、自移动设备及计算机可读存储介质,能够提高障碍物地图的准确率。
2、第一方面,本申请提供了一种地图更新方法,包括:
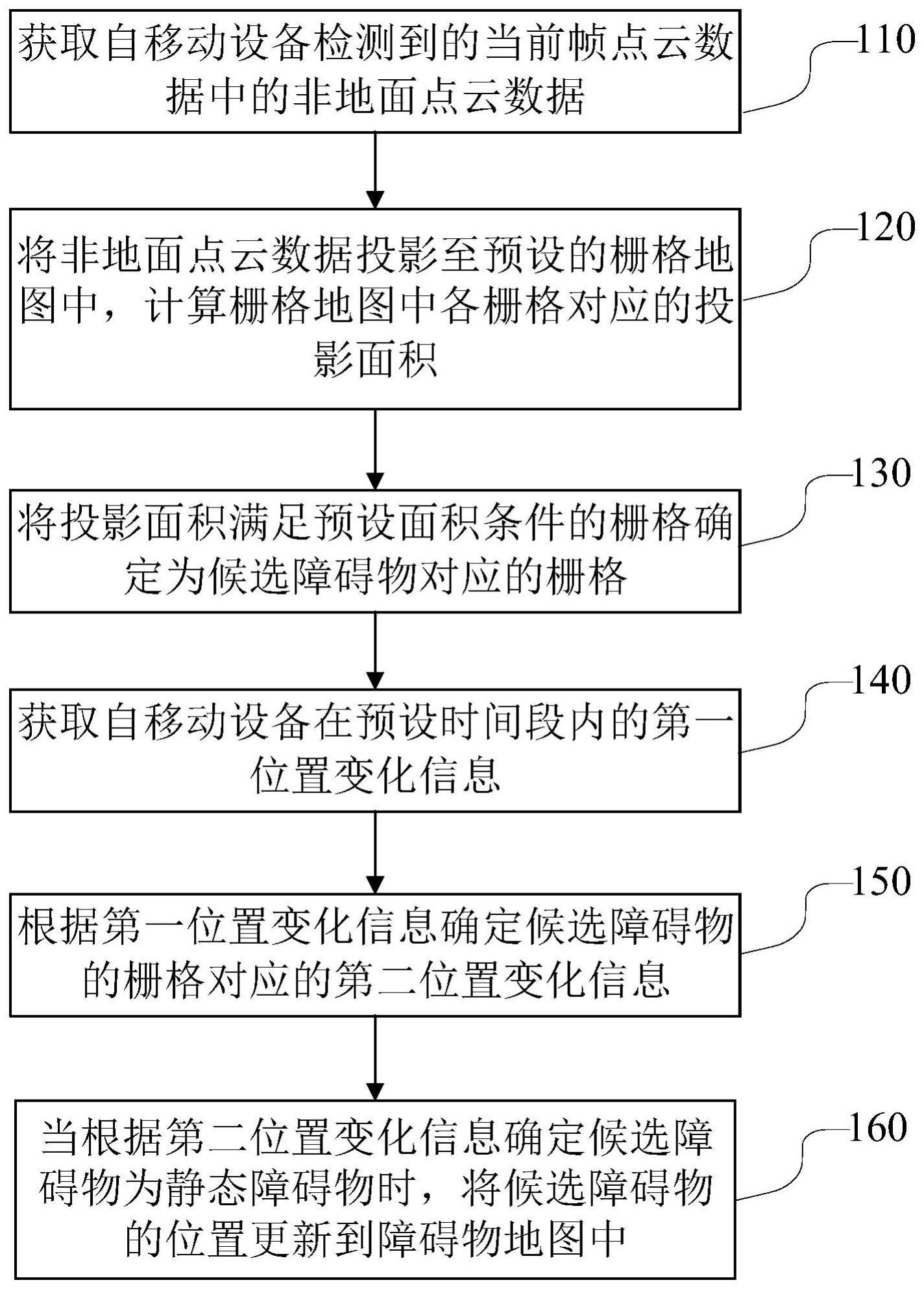
3、获取自移动设备检测到的当前帧点云数据中的非地面点云数据;
4、将非地面点云数据投影至预设的栅格地图中,计算栅格地图中各栅格对应的投影面积;
5、将投影面积满足预设面积条件的栅格确定为候选障碍物对应的栅格;
6、获取自移动设备在预设时间段内的第一位置变化信息;预设时间段为检测到前一帧点云数据和检测到当前帧点云数据之间的时间段;
7、根据第一位置变化信息确定候选障碍物的栅格对应的第二位置变化信息;
8、当根据第二位置变化信息确定候选障碍物为静态障碍物时,将候选障碍物的位置更新到障碍物地图中。
9、第二方面,本申请提供了一种地图更新装置,包括:
10、第一获取模块,用于获取自移动设备检测到的当前帧点云数据中的非地面点云数据;
11、第一计算模块,用于将非地面点云数据投影至预设的栅格地图中,计算栅格地图中各栅格对应的投影面积;
12、第一确定模块,用于将投影面积满足预设面积条件的栅格确定为候选障碍物对应的栅格;
13、第二获取模块,用于获取自移动设备在预设时间段内的第一位置变化信息;预设时间段为检测到前一帧点云数据和检测到当前帧点云数据之间的时间段;
14、第二确定模块,用于根据第一位置变化信息确定候选障碍物的栅格对应的第二位置变化信息;
15、更新模块,用于当根据第二位置变化信息确定候选障碍物为静态障碍物时,将候选障碍物的位置更新到障碍物地图中。
16、第三方面,本申请提供了一种自移动设备,该自移动设备包括存储器、处理器以及存储在上述存储器中并可在上述处理器上运行的计算机程序,上述处理器执行上述计算机程序时实现如上述第一方面的方法的步骤。
17、第四方面,本申请提供了一种计算机可读存储介质,上述计算机可读存储介质存储有计算机程序,上述计算机程序被处理器执行时实现如上述第一方面的方法的步骤。
18、第五方面,本申请提供了一种计算机程序产品,上述计算机程序产品包括计算机程序,上述计算机程序被一个或多个处理器执行时实现如上述第一方面的方法的步骤。
19、本申请与相关技术相比存在的有益效果是:通过将当前帧点云数据中的非地面点云投影至预设的栅格地图中,并计算得到栅格地图中各栅格对应的投影面积;投影面积越大说明映射到栅格地图上的点云数据越多,即聚集在同一栅格的点云数据越密集说明点云数据识别为障碍物的可能性越大。障碍物的类别包括动态障碍物和静态障碍物,因此,先将投影面积满足预设面积条件的栅格确定候选障碍物对应的栅格。鉴于动态障碍物在预设时间段内存在位置变化的特点,因此,可以通过计算预设时间段内自移动设备的第一位置变化信息来计算候选障碍物的第二变化信息,以消除自移动设备的运动对候第二位置变化信息的确定带来的影响。通过第二位置变化信息可准确确定候选障碍物在预设时间段内是否出现变化,从而在候选障碍物为静态障碍物时,将候选障碍物的位置更新至障碍物地图中,提高了静态障碍物的识别准确性,从而提高了障碍物地图更新的准确率。
20、可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
技术特征:
1.一种地图更新方法,其特征在于,所述地图更新方法包括:
2.如权利要求1所述的地图更新方法,其特征在于,所述计算所述栅格地图中各栅格对应的投影面积,包括:
3.如权利要求1所述的地图更新方法,其特征在于,所述根据所述第一位置变化信息确定所述候选障碍物的栅格对应的第二位置变化信息,包括:
4.如权利要求1所述的地图更新方法,其特征在于,在所述当根据所述第二位置变化信息确定所述候选障碍物为静态障碍物时,将所述候选障碍物的位置更新到障碍物地图中之前,所述方法还包括:
5.如权利要求4所述的地图更新方法,其特征在于,所述根据所述第二位置变化信息,确定当前帧点云数据中所述候选障碍物对应的得分值,包括:
6.如权利要求1所述的地图更新方法,其特征在于,在所述当根据所述第二位置变化信息确定所述候选障碍物为静态障碍物时,将所述候选障碍物的位置更新到障碍物地图中之前,所述方法还包括:
7.如权利要求1所述的地图更新方法,其特征在于,所述将所述投影面积满足预设面积条件的栅格确定为候选障碍物对应的栅格,包括:
8.一种地图更新装置,其特征在于,包括:
9.一种自移动设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的地图更新方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的地图更新方法。
技术总结
本申请公开了一种地图更新方法、地图更新装置、自移动设备及计算机存储介质,该更新方法包括:获取自移动设备检测到的当前帧点云数据中的非地面点云数据;将非地面点云数据投影至预设的栅格地图中,计算栅格地图中各栅格对应的投影面积;将投影面积满足预设面积条件的栅格确定为候选障碍物对应的栅格;获取自移动设备在预设时间段内的第一位置变化信息;预设时间段为检测到前一帧点云数据和检测到当前帧点云数据之间的时间段;根据第一位置变化信息确定候选障碍物的栅格对应的第二位置变化信息;当根据第二位置变化信息确定候选障碍物为静态障碍物时,将候选障碍物的位置更新到障碍物地图中。该方法能够提高障碍物地图的准确率。
技术研发人员:刘元财,张泫舜,陈浩宇
受保护的技术使用者:深圳市正浩创新科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!