一种基于区间扩展合并的雷达点迹凝聚方法
本发明涉及雷达数据处理,尤其涉及一种基于区间扩展合并的雷达点迹凝聚方法。
背景技术:
1、随着半导体、计算机技术等各个领域的快速发展,雷达技术的相关研究取得了重大突破,其应用领域及研究内容也在不断扩展,现代雷达不仅在军事上发挥了重要作用,也常用于国民经济等领域。早期雷达由于其分辨率较低,雷达信号处理后探测的目标原始信息仅由一个或少数几个点组成,目标点迹凝聚处理运算量相对较少。随着雷达成像技术的发展以及雷达测量精度的提高,雷达数据处理端接收到有效目标信息数据成倍增加,然而理想的雷达数据处理结果要求一个目标在一次扫描中仅产生一个点迹,大量的有效信息便于更精确测量目标的同时,对点迹凝聚算法也提出了更高的要求。
2、电子科技大学在其申请的专利文献“一种基于峰值聚类的目标检测点迹凝聚方法”(专利申请号:202110538477.5,申请公开号:cn113269242a)中公开了一种基于峰值聚类的目标检测点迹凝聚方法,该算法考虑了cfar检测点迹结果中同一类别的数据点向峰值点聚集的特点,设计了自动寻找峰值点的聚类算法,对采集的所有数据根据距离-多普勒二维信息计算欧式距离,利用幅度信息寻找每一类别的峰值数据点进而进行聚类,能够克服彼此相邻、点迹数据幅度和密度分布差异较大的多目标难以正确分类的难点。
3、北京中安锐达电子科技有限公司在其申请的专利文献“一种基于扇块结构的一次点迹凝聚方法”(专利申请号:202111217802.4,申请公开号:cn113820685a)中公开了一种基于扇块结构的一次点迹凝聚方法,适用于边扫描边跟踪(tws)的工作模式,以方位扇区和距离扇块为基本单位,对特定方位扇区中某一距离扇块的一次点迹,首先跟本距离扇块的剩余一次点迹进行点迹凝聚;然后跟本方位扇区中本距离扇块的前一个距离扇块中的所有一次点迹进行点迹凝聚;最后,跟本方位扇区之前若干个方位扇区中对应的距离扇块及对应距离扇块的前一个距离扇块中的所有一次点迹进行点迹凝聚。该发明可以有效避免距离相差较大的一次点迹之间进行的无效匹配,但多方位扇块和距离扇块之间的重复判断仍然增加了点迹凝聚的复杂度,不利于算法运算量的进一步提高。
4、西安科锐盛创新科技有限公司在其申请的专利文献“基于轮廓跟踪区域生长的海面目标点迹凝聚方法及系统”(专利申请号:202011602419.6,申请公开号:cn112630743a)中公开了一种基于轮廓跟踪区域生长的海面目标点迹凝聚方法及系统,该方法包括:获取海面图像并对图像进行二值化和形态学的预处理;并利用轮廓跟踪技术对图像中的各个海面目标进行检测和跟踪,然后使用区域生长手段得到各海面目标的区域像素点,并对各目标的区域像素点进行点迹凝聚,得到最终的凝聚结果。该方法能够得到更加精确的目标凝聚位置,提高点迹凝聚精度。其中检测和区域生长主要在二维网格中通过二维搜索和邻域遍历方法实现,每个网格像素灰度值被多次遍历判断,高精度凝聚的同时也带来了一定的耗时;在海面成像方面,成像总是预示着一定的数据积累,成像数据在边缘部分的点迹凝聚问题是一直以来的处理难点。
5、综上,传统点迹凝聚算法通过方位向滑窗来确定目标在方位向的信息,然后在距离向进行点迹凝聚处理,得到当前的目标信息,包括目标的距离中心、目标的幅度、目标的方位角、俯仰角等。主要思想通过设置一定的方位滑窗宽度对数据进行积累,当达到积累条件后对积累的数据进行内部凝聚,但是,对于大目标或者高方位分辨率雷达,目标检测点迹可能正好被滑窗边缘分割或跨多个滑窗宽度,而两坐标预警雷达由于没有方位测角,其方位波束宽度很窄因此以天线指向作为单次检测目标的方位角度,原始点迹在方位上的分裂以雷达方位分辨率为基本分裂单元,方位维分裂比较严重,同时由于其循环周扫的特性,运动目标在雷达一圈的扫描中被扫描角度与天线半功率波束宽度相一致,若要求凝聚点迹只有一个点时不能使用滑窗法来进行方位凝聚。
6、另一类基于dbscan聚类思想的凝聚方法较传统凝聚算法,可在积累一圈后对整个极坐标系下的原始数据进行聚类凝聚,克服了滑窗问题,其主要思想是通过递归计算任一两点之间的欧式距离,将所有满足欧式距离门限内的点划分为一个簇,簇内进行点迹凝聚。但因两坐标预警雷达体制下的方位分裂性质,同一方位分辨率下,近距离两点间的欧式距离和远距离两点间的欧式距离差距过大,凝聚门限过小时容易在远距离失效,门限过大又容易造成近距离或相邻目标的误凝。
技术实现思路
1、为了解决上述问题,本发明考虑了两坐标预警雷达工作特性与点迹特征,提出一种基于区间扩展合并的雷达点迹凝聚方法。本发明从区间角度入手,有效解决了方位滑窗法带来的凝聚不充分问题,点迹滤波效果良好,保证性能的同时满足了雷达数据预处理的实时性要求。
2、本发明采用的技术方案如下:
3、一种基于区间扩展合并的雷达点迹凝聚方法,包括如下步骤:
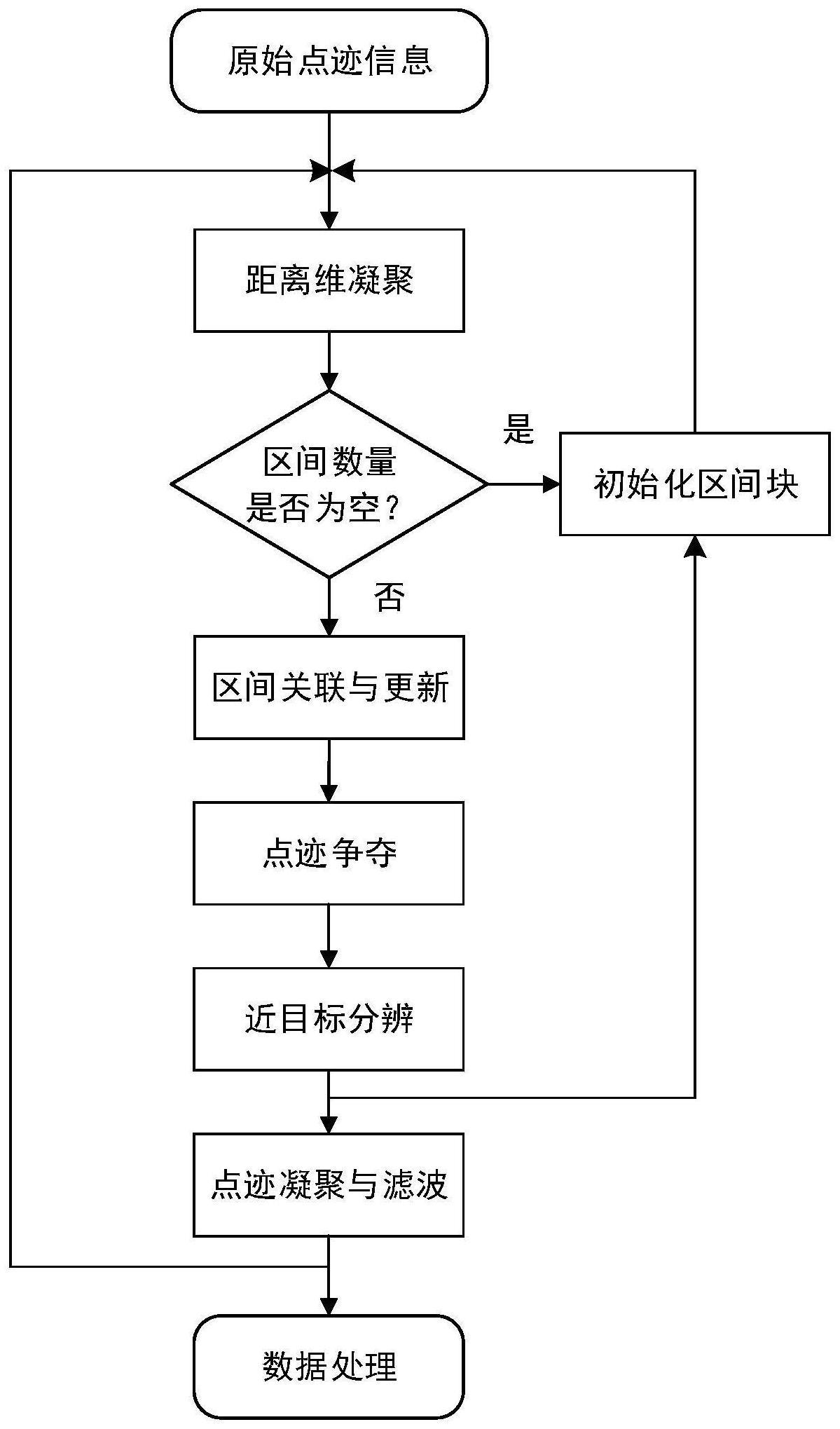
4、(1)对原始点迹数据进行距离维凝聚:对原始点迹数据进行同一方位上的距离维归并凝聚;
5、(2)初始化区间块结构体参数:完成距离维凝聚后,且区间块数量为空时将当前批次下的新生点迹初始化为新的区间块;
6、(3)迭代进行新生点迹和区间块的关联与更新:根据新生点迹与原有区间参数的距离方位信息进行关联尝试,将符合条件的距离维凝聚点添加到对应的区间块内,并扩展更新区间块的范围参数;
7、(4)点迹争夺与近目标分辨:对存在重叠、争夺或邻近小目标的区间块,结合现有区间块质心与点迹特征参数进行冲突情况处理;
8、(5)区间块内部数据的质心凝聚:对满足凝聚条件的区间内部数据进行最终凝聚;
9、(6)点迹滤波:根据凝聚点迹的结果特征滤除非目标点迹。
10、进一步地,步骤(1)中,在接收到来自雷达信号处理机目标检测模块的原始检测结果后,提取当前批次结果中各原始点迹的距离、回波幅度信息,使用两点滑窗法进行距离维一次凝聚,所述原始点迹的数据包括点迹的录取时间、距离、多普勒速度、方位角和回波幅度。
11、进一步地,所述使用两点滑窗法进行距离维一次凝聚包括如下步骤:
12、(1a)对直接接收到的原始点迹按距离信息从小到大的顺序进行排序;
13、(1b)依次遍历排序后的点迹数据,同时计算相邻两目标点之间的距离差值,当相邻差值满足凝聚距离门限条件时,归为同一目标;当相邻差值不满足距离门限时,将两点滑窗中的最新点看作新目标,并以此为基准继续向后判断,将距离维点迹划分为一系列的一维点迹块;
14、(1c)对划分好的点迹块完成一次点迹凝聚。
15、进一步地,步骤(2)中,需建立以方位角度为横坐标轴、目标与雷达之间的径向距离为纵坐标轴的二维坐标系,区间块在二维坐标系中的形状体现为长方形块,具有方位宽度和距离宽度,区间块参数包括区间的起始方位角azistart、终止方位角aziend、起始距离rmin、终止距离rmax、待凝聚点迹列表以及区间块达到凝聚条件时包含的所有原始点迹个数。
16、进一步地,步骤(3)中,新生点迹和区间块的关联方法包括如下步骤:
17、(3a)对原有区间块和距离维凝聚点迹进行特征分析,对m个区间块,保证其按区间起始距离信息从小到大排序,n个距离维凝聚点按距离信息排序;
18、(3b)两类数据并行遍历时,对第i个区间块和第j个距离维凝聚点,当区间起始距离和凝聚点距离的差值大于距离凝聚门限时,跳转到下一个距离点,对第i个区间块和第j+1个距离点继续进行关联判断;而当区间终止距离和待关联点距离的差值大于距离凝聚门限时,继续遍历下一个区间,即对第i+1个区间块和第j个距离点进行关联判断;其他情况下,判定当前点迹可与区间块进行关联,将目标点加入区间块内部的点迹序列,同时更新区间的边界参数,之后继续对第i+1个区间块和第j+1个待关联点进行判断,重复迭代直至完成所有数据的遍历。
19、进一步地,步骤(4)中,在区间关联判断的遍历过程时,对单一点迹被多个区间块关联的争夺现象进行冲突解决,对在扩展过程中逐渐重叠或具有重叠趋势的区间块进行邻近目标分辨,完成各点迹数据的正确关联,最终剩余的点迹数据则各自形成新的区间块结构,在下一轮新生点迹来临时参与关联遍历。
20、进一步地,步骤(4)包括如下子步骤:
21、(4a)对点迹争夺与近目标重叠现象涉及的区间块参数,根据质心公式计算各区间块相应的临时质心结果,包括当前点迹列表数据的距离、方位、幅值质心信息;
22、(4b)对点迹争夺现象,判断多个区间临时质心与待关联点迹的位置关系,取最近的区间块作为点迹最终的关联对象;对邻近区间而言,比较相应临时质心的位置和幅值特征信息,当临时质心满足点迹凝聚门限时,将两个区间块合并,判定为同一个目标的区间点迹;否则判断为两个邻近小目标,以临时质心为基准继续进行扩展凝聚。
23、进一步地,步骤(5)中,根据雷达天线指向,对满足凝聚条件的区间块,采用幅度加权的方法对内部数据进行二次凝聚,并提取最终目标点的特征参数。
24、进一步地,步骤(5)中,当天线方位角指向与区间终止角的角度差值大于方位凝聚门限时,区间块达到凝聚条件,相应的判断公式为:
25、(azi1+360-azi0)%360≥azinum*azipix
26、式中,azi1表示当前天线中心的方位角指向,azi0表示区间块的终止方位角,azinum表示方位维凝聚时方位单元的凝聚门限个数,azipix表示雷达系统的方位分辨率。
27、进一步地,步骤(6)中,对最终得到的凝聚点迹数据,结合雷达体制中目标点的分裂特性,设置相应的点迹分裂数量、距离宽度、方位宽度和幅值门限,对非目标点迹进行滤除。
28、本发明的有益效果在于:
29、1.本发明在进行距离维一次凝聚时,采用的两点滑窗归并方法,只需要计算相邻点迹之间的距离差值,每个点迹至多只会遍历两次,较其他方法进行所有距离单元的峰值检索遍历次数大大降低,提高了数据处理的性能。
30、2.本发明在进行方位维凝聚时采取区间块扩展合并的关联方式,在二次凝聚时综合考虑距离和方位两维度信息,较现有技术在方位凝聚时仅仅进行同一距离下不同方位点迹的处理策略,大大提高了点迹归并的效率和容错率,同时采取边检测边凝聚的方法,有效抑制了滑窗式数据积累带来的分裂现象,能够有效解决点迹争夺和邻近目标分辨问题。
31、3.本发明在点迹凝聚基础上进一步进行了点迹滤波处理,综合考虑最终目标点迹的各项特征,能够实现离散噪声点和密集杂波区点迹的有效识别和滤除,提高了点迹处理的准确性。
32、4.现有的点迹凝聚技术所研究的点迹对象大多基于经过方位俯仰测角后的雷达探测体制,点迹凝聚时原始点迹数据的主要误差来源于角度测量自身的误差,点迹的分布还是以真实点迹为中心的空间随机误差为主;而本发明所针对的研究对象则以两坐标预警雷达为主,可通用于同一体制下的多种型号雷达。
33、5.传统点迹凝聚技术主要采取滑窗积累的方式对一定时间内的数据进行积累后再进行点迹凝聚操作,滑窗边缘点迹容易形成分裂现象且处理结果具有一定的滞后性;本发明使用二维区间扩展合并的凝聚方式,不再需要数据积累,有效解决了凝聚不充分和滞后问题。
- 还没有人留言评论。精彩留言会获得点赞!