一种三维能量场水下融合通信定位方法与流程
本发明涉及水下监控通信定位,具体涉及一种三维能量场水下融合通信定位方法。
背景技术:
1、水声导航是在声纳和无线电导航的综合技术基础上发展起来的导航技术。水声定位系统具有多个基元,基元一般为接收器或应答器,基元间连线称为基线,根据基线长度可分为长基线系统、短基线系统和超短基线系统。这三种系统导航都需事先在海域布放换能器或换能器阵以实现声学导航。换能器(或换能器阵)声源(信标或应答器)发出的脉冲被一个或多个设在母船上的声学传感器接收,收到的脉冲信号经过处理和按预定的数学模型进行计算就可以得到声源的位置。
2、目前水下定位应用比较广泛的是usbl超短基线定位技术。船上基站接受水下设备声源信号,通过计算声源信号数据的到达时间进行平面坐标的定位,传统的usbl超短基线水声定位技术是基于固定基站的定位系统。整套系统对地面基站的依赖度非常高。一旦地面基站停止工作或者出现故障,水下设备就会失去定位信息。
3、因此,发明一种三维能量场水下融合通信定位方法来解决上述问题很有必要。
技术实现思路
1、本发明的目的是提供一种三维能量场水下融合通信定位方法,通过本通信定位方法,以解决现有技术中一旦地面基站停止工作或者出现故障,水下设备就会失去定位信息,水下设备不能完全独立通信定位的问题。
2、为了实现上述目的,本发明提供如下技术方案:一种三维能量场水下融合通信定位方法,包括以下步骤;
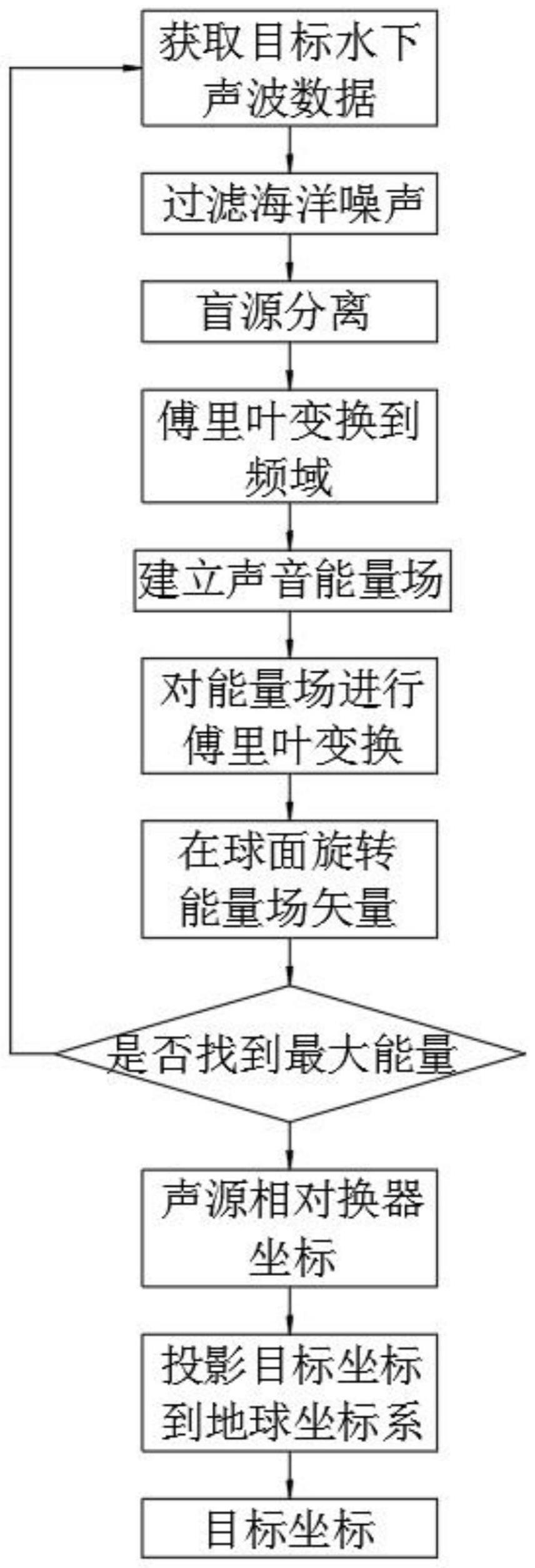
3、s1、实时监测、获取目标设备水下声波数据,并对获取的数据进行初步整合,发送水下目标设备周围区域的声波数据,执行s2;
4、s2、进行水下声波数据的处理,进行海洋噪声的过滤处理,对收集到的声音信息进行预处理,过滤掉高频噪声和低频海洋噪声后,将声源数据进行声源盲源分离,对声音源头进行数量估计,执行s3;
5、s3、通过估计出来的数量进一步与声源型号数据进行融合处理,使用时间加窗算法将声音波形相似的部分判定为同一声音源头,执行s4;
6、s4、分离6个声音源头后,会得到6个通道的声音数据,通过盲源分离模块对6个声音通道数据进行傅里叶频域变换,建立声音能量场,将频域变换得到的频域图进行能量加权后得到二维的声音频谱能量映射场,执行s5;
7、s5、建立三维能量场矢量模型,将三维能量场离散分割为以一度为离散单位的栅格图空间,在三维球形空间内旋转二维能量场的矢量矩阵,执行s6;
8、s6、在执行s5时,同时计算每一个矢量相对于原点的空间能量,将每一个栅格输出的能量值进行比较,得出在三维空间内能量最大的区域,在这个能量最大区域内使用聚类算法得到最后能量最大的最小区域,这个最小的区域就是目标设备在三维空间相对于本地设备的坐标位置,输出声源相对于本地设备的坐标,执行s7;
9、s7、通过惯性导航计算目标设备相对于地球的坐标,接收目标设备对于本地设备的投影,结合s6得到的目标设备相对于地球坐标系的坐标位置,将所得目标位置坐标通过本地设备投影到地球坐标系,即获得目标物体相对于本地设备的坐标矩阵,建立目标物体位置的三维坐标信息;
10、作为本发明的一种优选方案,所述步骤s1中获取主要内容为水下声波数据,获取惯性导航数据,获取水压,水温数据。
11、作为本发明的一种优选方案,所述获取惯性导航数据,过滤加速度,角加速度数据,对数据进行初步整合。
12、作为本发明的一种优选方案,所述纪录坐标历史数据,使用卡尔曼滤波算法对目标设备相对于地球坐标系的运动轨迹进行预测。
13、作为本发明的一种优选方案,所述获取目标设备当前位置的水深水温数据和由s6产生的目标物体的坐标位置。
14、作为本发明的一种优选方案,所述结合目标位置的声音速度和当前设备的水深水温数据,将计算得出的声音速度传输给s4的盲源分离模块。
15、作为本发明的一种优选方案,所述计算得出的声音速度传输给s4的声音能量场,数据每50ms更新一次。
16、作为本发明的一种优选方案,所述将s7得到的目标位置相对与设备的相对坐标,结合现有得到的设备相对与地球的相对坐标。
17、作为本发明的一种优选方案,所述投影计算出目标位置相对于地球坐标系的绝对坐标位置。
18、在上述技术方案中,与现有技术相比本发明提供的技术效果和优点如下:
19、1、通过在各船上均建立此设置,设备可互相接收彼此目标位置的设备信息,获取目标位置水声波数据和其他数据,在对声波数据和其他数控进行一系列分析计算处理,从而建立目标物体位置的三维坐标信息,即可在不需要地面基站的条件下做到水下定位设备互相定位,并且实时补偿校准定位误差;
20、2、通过对地球坐标不断迭代目标位置来计算相应的声音速度。在迭代多个循环后将得到相对准确的目标位置发出声音较为准确的声音速度,对当前水深水温数据对声音速度进行更新,不断修正目标位置的声音速度,从而对整套系统的算法模块进行数据修正,修正因为声音速度不同而导致的分离误差,修正因为声音速度不同而导致的能量场坐标误差。
技术特征:
1.一种三维能量场水下融合通信定位方法,其特征在于:包括以下步骤;
2.根据权利要求1所述的一种三维能量场水下融合通信定位方法,其特征在于:所述步骤s1中获取主要内容为水下声波数据,获取惯性导航数据,获取水压,水温数据。
3.根据权利要求2所述的一种三维能量场水下融合通信定位方法,其特征在于:所述获取惯性导航数据,过滤加速度,角加速度数据,对数据进行初步整合。
4.根据权利要求3所述的一种三维能量场水下融合通信定位方法,其特征在于:所述纪录坐标历史数据,使用卡尔曼滤波算法对目标设备相对于地球坐标系的运动轨迹进行预测。
5.根据权利要求4所述的一种三维能量场水下融合通信定位方法,其特征在于:所述获取目标设备当前位置的水深水温数据和由s6产生的目标物体的坐标位置。
6.根据权利要求5所述的一种三维能量场水下融合通信定位方法,其特征在于:所述结合目标位置的声音速度和当前设备的水深水温数据,将计算得出的声音速度传输给s4的盲源分离模块。
7.根据权利要求6所述的一种三维能量场水下融合通信定位方法,其特征在于:所述计算得出的声音速度传输给s4的声音能量场,数据每50ms更新一次。
8.根据权利要求7所述的一种三维能量场水下融合通信定位方法,其特征在于:所述将s7得到的目标位置相对与设备的相对坐标,结合现有得到的设备相对与地球的相对坐标。
9.根据权利要求8所述的一种三维能量场水下融合通信定位方法,其特征在于:所述投影计算出目标位置相对于地球坐标系的绝对坐标位置。
技术总结
本发明公开了一种三维能量场水下融合通信定位方法,包括以下步骤;S1、实时监测、获取设备水下声波数据,并对获取的数据进行初步整合,发送水下设备周围区域的声波数据,执行S2;S2、进行水下声波数据的处理,进行海洋噪声的过滤处理,对收集到的声音信息进行预处理,过滤掉高频噪声和低频海洋噪声后,将声源数据进行声源盲源分离,对声音源头进行数量估计,执行S3;S3、通过估计出来的数量进一步与声源型号数据进行融合处理。本发明通过本通信定位方法,以解决现有技术中一旦地面基站停止工作或者出现故障,水下设备就会失去定位信息,水下设备不能完全独立通信定位的问题。
技术研发人员:郝英男
受保护的技术使用者:郝英男
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!