一种基于猫眼效应的无人机探测方法及装置与流程
本发明属于激光成像,具体涉及一种基于猫眼效应的无人机探测方法及装置。
背景技术:
1、目前,传统雷达探测手段对高空、高速、大型无人机的探测效果较好,但对体积小、信号弱、飞行高度低的低慢小无人机的探测存在盲区大、回波小、容易与气象干扰、杂波干扰或鸟群相混淆等缺点。射频技术可以有效发现隐匿在复杂地形中的无人机,但是无法实现对无人机的精细识别。而传统光电、红外传感器也存在探测识别距离近等问题。
2、通常,光电成像设备是无人机的常见载荷,一般具有猫眼效应,即为,光电设备中的发射器件在受到外部激光的照射时会产生指向原光源方向、回波能量比普通漫反射强2-4个数量级的后向反射光。上述猫眼效应为无人机的远程探测跟踪和精准识别提供了便利条件。因此,可通过对目标区域主动发射探测激光以实现对无人机光电设备的探测与识别。
3、传统的猫眼目标识别都是在主被动差分法的基础上完成的(例如:复杂场景下的猫眼目标快速识别方法,兵器装备工程学报,2022,43(07);动态环境下“猫眼”目标快速识别算法研究,计算机仿真,2020,37(08);基于纹理特征的“猫眼”效应目标识别方法,光子学报,2014,43(02)),与此类算法配套的激光主动探测系统一般采用脉冲激光作为照明激光器,照明激光器每间隔一帧的时间照明一次,从而使探测器获得主动和被动图像并做差分来减小背景噪声的干扰,接着再将差分图像进行一系列图像处理从而进一步滤除背景噪声,这种方法是目前的猫眼效应识别的最常用方法。
4、但是,主被动差分法具有以下缺陷:一是需要额外配置触发电路来控制出射激光脉冲使得其能与探测器采集帧频同步;二是在实际的复杂背景环境和气象条件下,尤其是在远距离探测动态低慢小无人机的情况下,由于猫眼效应回波会受到大气湍流、探测平台震动、目标运动以及背景杂散光等各方面因素的影响,造成回波图像信噪比低、所占像素过少、猫眼光斑强度在时间尺度上波动较大(例如连续采集的两幅图像均为主动图像或被动图像)等问题,使得成像质量较差,主被动图像匹配率低,从而导致探测系统对动态猫眼目标探测识别不清、虚警率高。可见,基于主被动差分法的猫眼目标探测识别方法实现对远距离复杂背景条件下无人机带载光电设备的探测与识别难度较大。
技术实现思路
1、本说明书的目的是提供一种基于猫眼效应的无人机探测方法,以克服上述在远距离复杂环境下对低慢小无人机的探测和识别缺陷。为实现上述目的,本说明书采用如下技术方案:
2、一方面,本说明书提供一种基于猫眼效应的无人机探测方法,包括:
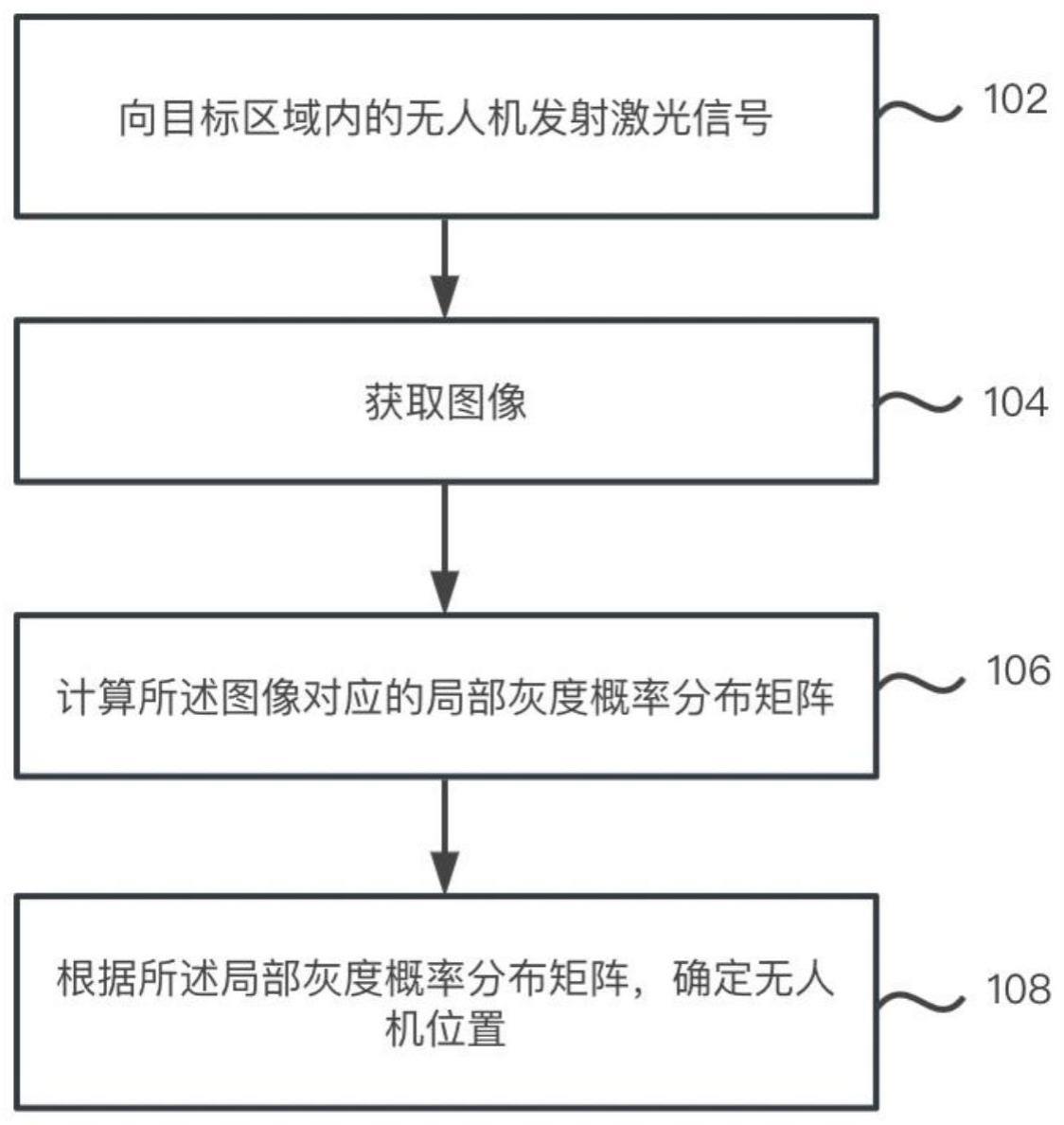
3、向目标区域内的无人机发射激光信号;
4、获取图像,所述图像包含目标区域内无人机接收所述激光信号后产生的猫眼回波信号且所述图像的采集周期与所述激光信号的脉冲相匹配;
5、计算所述图像对应的局部灰度概率分布矩阵,所述局部灰度概率分布矩阵包含所述图像中各像素点对应的局部灰度概率值;
6、根据所述局部灰度概率分布矩阵,确定无人机位置。
7、另一方面,本说明书还提供一种基于猫眼效应的无人机探测装置,主要包括:
8、发射模块,用于处理向目标区域内无人机发射的激光信号,并用于发射处理后的激光信号;
9、接收模块,用于获取图像,所述图像包含目标区域内无人机接收所述激光信号后产生的猫眼回波信号;
10、信号处理模块,用于接收所述图像,计算所述图像对应的局部灰度概率分布矩阵,所述局部灰度概率分布矩阵包含所述图像中各像素点对应的局部灰度概率值;根据所述局部灰度概率分布矩阵,确定无人机位置。
11、基于上述任一技术方案,本说明书能够获得如下技术效果:
12、与现有技术相比,该无人机探测方法基于猫眼回波效应,通过计算采集而得的图像的局部灰度概率分布矩阵(即获得各图像的像素点的局部灰度特征),确定无人机的位置。该探测方法可大大降低远距离和复杂环境等外在条件对猫眼效应造成的不利影响,以提升鲁棒性。而且,该方案无需预先进行图像预处理或背景去噪处理,如此,可大大简化方法的复杂程度,以降低探测时间,提升其响应性能。例如,对于动态飞行的低慢小无人机可进行实时探测和定位。
技术特征:
1.一种基于猫眼效应的无人机探测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述计算所述图像对应的局部灰度概率分布矩阵,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述灰度矩阵,计算所述图像对应的局部灰度概率分布矩阵,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述局部灰度概率分布矩阵,确定无人机位置,包括:
5.根据权利要求1所述的方法,其特征在于,所述向目标区域内的无人机发射激光信号之前,还包括:
6.一种基于猫眼效应的无人机探测装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,所述接收模块包括光学镜头和光学探测器,其中:
8.根据权利要求7所述的装置,其特征在于,所述接收模块还包括滤光片,所述滤光片设置于所述光电探测器与目标之间,所述滤光片用于滤除目标区域的反射光的背景噪声,并将经滤除后的反射光发送至所述光电探测器。
9.根据权利要求6所述的装置,其特征在于,还包括控制模块,用于控制所述发射模块和所述接收模块同步,以使所述激光信号的脉冲与所述图像的获取周期匹配。
10.根据权利要求6所述的装置,其特征在于,还包括显示模块,所述显示模块分别与所述信号处理模块和所述接收模块连接,所述显示模块用于同时显示自所述接收模块获取的原图像和自所述信号处理模块获取的处理后图像。
技术总结
本说明书涉及一种基于猫眼效应的无人机探测方法及装置,涉及激光成像技术领域。该方法包括向目标区域内的无人机发射激光信号;获取图像,图像包含目标区域内无人机接收激光信号后产生的猫眼回波信号且图像的采集周期与激光信号的脉冲相匹配;计算图像对应的局部灰度概率分布矩阵,局部灰度概率分布矩阵包含图像中各像素点对应的局部灰度概率值;根据局部灰度概率分布矩阵,确定无人机位置。该方法可大大降低远距离和复杂背景环境等外在条件对猫眼效应探测造成的不利影响,以提升鲁棒性。而且,该方法无需预先进行图像预处理和背景去噪处理,如此,可大大简化方法的复杂程度,以降低探测时间,提升其响应性能。
技术研发人员:雷成敏,周峰,马瑶瑶,陈河,田苗,韩国良,徐文玲
受保护的技术使用者:中国人民解放军93236部队
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!