一种时间延时积分型直接飞行时间LiDAR传感器及处理方法与流程
本发明属于激光雷达传感器,尤其是一种时间延时积分型直接飞行时间lidar传感器及处理方法。
背景技术:
1、近年来,激光雷达(light detectionandranging,lidar)传感器已在用户识别、ar/vr设备和自动驾驶汽车等多种领域中得到了广泛应用。由于具有比间接飞行时间(indirect time-of-flight,itof)激光雷达传感器更大的检测范围以及更强的抗背景光干扰能力,基于单光子雪崩二极管(single photon avalanche diode,spad)的直接飞行时间(direct time-of-flight,dtof)激光雷达传感器已经成为户外环境中远距离测量的理想选择。
2、对于大多数dtof-lidar传感器而言,在spad接收到光信号的时候会产生一个电信号,然后经过像素前端电路的处理后会传递给时间数字转换电路(time-to-digitalconverter,tdc)进行量化,再通过读出电路将存有时间信息的数据读出,那么通过多次测量就可以在在片外得到大量数据,从而计算出实际距离。然而,对于这种片外处理数据的方式而言,读出电路输出的数据量太大,从而限制了帧率。为了减少数据量,直方图型tdc被提出。传统的直方图tdc的工作方式如图1所示。spad像素在接收到反射的光信号时将产生一个脉冲给tdc,tdc经过一次测量会在对应的时间戳上对计数值加1。直方图的形成方式如图2,经过多次测量之后,就会在一个时间段上形成直方图,直方图中最大的计数值所对应的时间即认为是实际的飞行时间,然后只需将对应的时间信息读出即可。这种片内形成直方图方式的输出的数据量大大减小,但是却需要大量的存储电路来存储每次测量所得的数据,所以电路的面积开销很大,且精度往往不够高。
3、为了进一步降低数据率,在直方图tdc的基础上,一种基于逐次逼近型的直方图tdc被提出。逐次逼近型tdc形成直方图的方式如图3所示,其工作方式与传统的直方图tdc不同之处在于,无需在多个小的时间戳范围内都进行计数并存储,而是进行多步的逐次逼近操作,即第一步先在两个大的时间戳范围内进行计数,通过比较两个时间戳上的计数值来确定反射光所在的时间戳。第二步把上一步细化的时间范围分为两个更小的时间戳,然后在这两个更小的时间戳上再进行计数,进一步缩小反射光所在的时间戳范围。经过多步这样的操作后,就可以逐步逼近反射光所在精确时间。而且基于逐次逼近的方法与传统型的相比,无需将所有测量所得的数据均存储在片上,而是每经过一次逼近就舍弃掉一部分数据,无需将所有数据都放入存储电路中,因此其片上面积消耗较少。理论上,逐步逼近型tdc可以通过多步的操作无限提高时间精度,但是其往往受制于时钟频率的影响无法达到一个很高的精度。而且由于逐次逼近型tdc要经过多步的逼近操作,比起传统直方图tdc的工作方式帧率降低了很多。
4、为了进一步提高dtof激光雷达的精度以及帧率,就需要进一步对激光雷达的扫描方式以及读出电路结构进行改善。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提出一种时间延时积分型直接飞行时间lidar传感器及处理方法,基于面阵型扫描的工作方式,工作时在每个较小的渡越时间内就能完成一次量化并读出,即提高了帧率。传感器的读出电路采用逐次tdc逐次逼近直方图峰值的方式,可以使得量化产生的数据量大大减小,从而在减小了内部存储电路的面积开销的同时,读出的数据量也大大减少。同时该系统采用粗量化加细量化的方法,在较低的时钟频率下,提高了直方图tdc的量化精度。
2、本发明解决其技术问题是采取以下技术方案实现的:
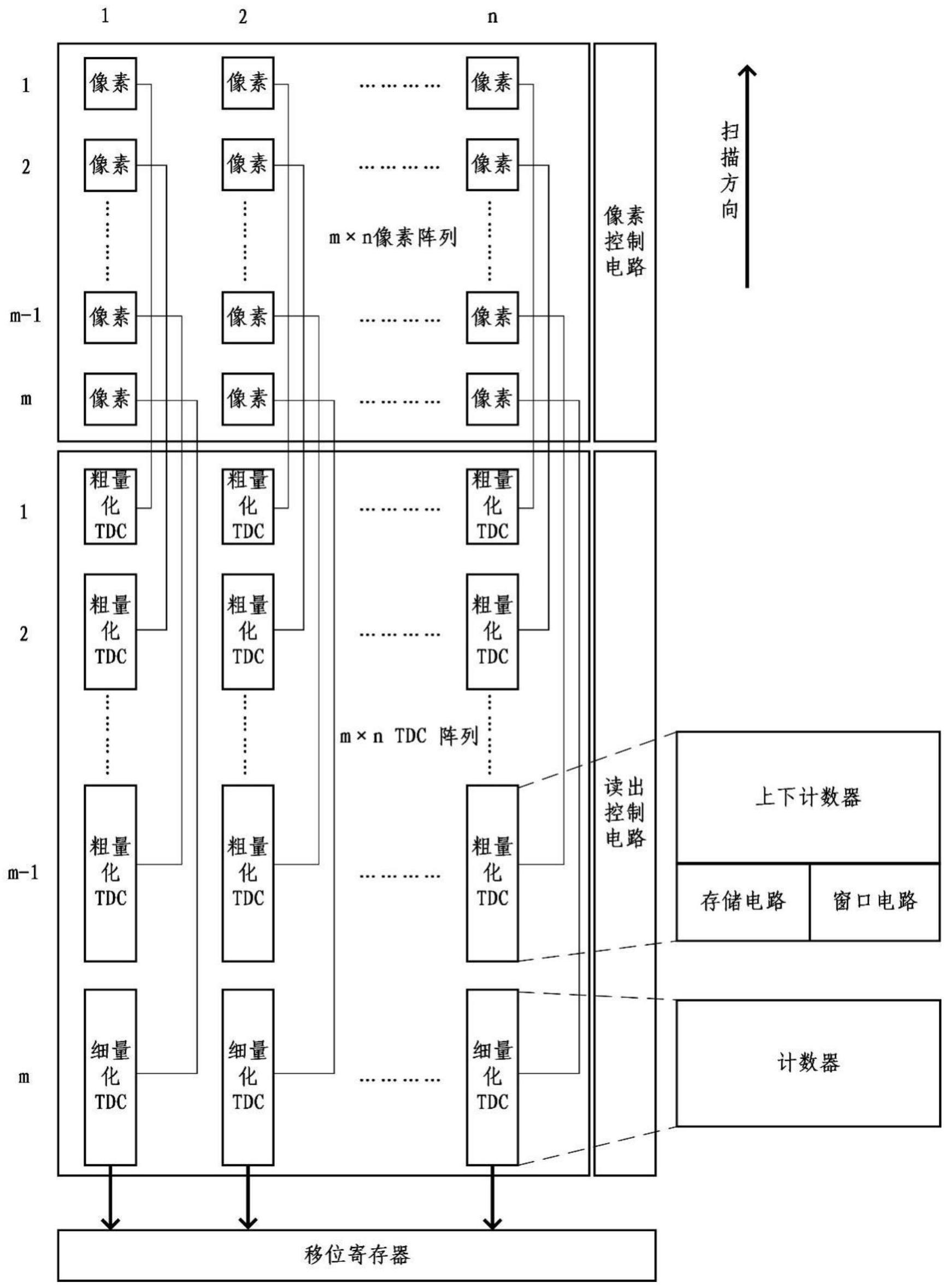
3、一种时间延时积分型直接飞行时间lidar传感器,其特征在于:包括m×n的像素阵列、m×n的tdc阵列、像素控制电路、读出控制电路以及位移寄存器,其中m×n的像素阵列分别对应连接m×n的tdc阵列,像素控制电路控制m×n的像素阵列,读出控制电路读取m×n的tdc阵列的量化数据,m×n的tdc阵列的输出端连接位移寄存器。
4、而且,所述m×n的tdc阵列采用前m-1级粗量化tdc加最后一级细量化tdc的方式。
5、而且,所述粗量化tdc包括上下计数器、存储电路和窗口电路,细量化tdc包括计数器。
6、而且,所述传感器基于扫描的方式,按照列的方向对目标物进行扫描,每个渡越时间内,m×n的tdc阵列中每一级的tdc均进行量化操作。
7、一种时间延时积分型直接飞行时间lidar传感器的处理方法,处理的具体实现方法为:
8、激光器发射一个方波脉冲,同时m×n的像素阵列中的像素从第一级开始对物体进行扫描,相应的m×n的tdc阵列中的tdc对所得到的反射光的脉冲进行量化;
9、对于第一级tdc的上下计数器,其计数的时间是所能测量的最大范围,无需窗口电路产生,在这个范围的前半段,将上下计数器切换为向上计数模式,每接收到一个脉冲信号计数器的值加1,在这个时间范围的后半段,上下计数器切换为向下计数模式,每接受到一个脉冲计数器的值就减1;
10、经过多次测量,最终取上下计数器的产生的符号位存入第一级tdc的存储电路中,然后第一级的窗口电路通过对存储电路中的符号位进行逻辑运算产生第二级计数的时间范围;
11、像素第二级扫描到物体时,第二级的tdc在第一级的窗口电路给出的时间范围内进行计数,同样是在上半段计数器进行向上计数,下半段进行向下计数,多次测量得到的符号位会存入存储电路中,然后窗口电路根据这个符号位再生成第三级的量化时间范围;经过m-1级tdc的量化操作,完成对反射光位置的逐步逼近。
12、本发明的优点和积极效果是:
13、本发明基于面阵型扫描的工作方式,工作时在每个较小的渡越时间内就能完成一次量化并读出,即提高了帧率。传感器的读出电路采用逐次tdc逐次逼近直方图峰值的方式,可以使得量化产生的数据量大大减小,从而在减小了内部存储电路的面积开销的同时,读出的数据量也大大减少。同时该系统采用粗量化加细量化的方法,在较低的时钟频率下,提高了直方图tdc的量化精度。本发明得益于粗量化每一级只产生1个符号位,tdi-dtof-lidar传感器会比传统的dtof-lidar传感器有更小的数据量,更高的帧率,以及更小的存储电路面积开销。而粗量化+细量化的方式可以使得无须在高频的时钟输入的情况下就可以达到很高的量化精度。
技术特征:
1.一种时间延时积分型直接飞行时间lidar传感器,其特征在于:包括m×n的像素阵列、m×n的tdc阵列、像素控制电路、读出控制电路以及位移寄存器,其中m×n的像素阵列分别对应连接m×n的tdc阵列,像素控制电路控制m×n的像素阵列,读出控制电路读取m×n的tdc阵列的量化数据,m×n的tdc阵列的输出端连接位移寄存器。
2.根据权利要求1所述的一种时间延时积分型直接飞行时间lidar传感器,其特征在于:所述m×n的tdc阵列采用前m-1级粗量化tdc加最后一级细量化tdc的方式。
3.根据权利要求2所述的一种时间延时积分型直接飞行时间lidar传感器,其特征在于:所述粗量化tdc包括上下计数器、存储电路和窗口电路,细量化tdc包括计数器。
4.根据权利要求2所述的一种时间延时积分型直接飞行时间lidar传感器,其特征在于:所述传感器基于扫描的方式,按照列的方向对目标物进行扫描,每个渡越时间内,m×n的tdc阵列中每一级的tdc均进行量化操作。
5.一种如权利要求1至3任一项所述的时间延时积分型直接飞行时间lidar传感器的处理方法,其特征在于:处理的具体实现方法为:
技术总结
本发明涉及一种时间延时积分型直接飞行时间LiDAR传感器及处理方法,其基于面阵型扫描的工作方式,工作时在每个较小的渡越时间内就能完成一次量化并读出,即提高了帧率。传感器的读出电路采用逐次TDC逐次逼近直方图峰值的方式,可以使得量化产生的数据量大大减小,从而在减小了内部存储电路的面积开销的同时,读出的数据量也大大减少。同时该系统采用粗量化加细量化的方法,在较低的时钟频率下,提高了直方图TDC的量化精度。本发明益于粗量化每一级只产生1个符号位,TDI‑DToF‑LiDAR传感器会比传统的DToF‑LiDAR传感器有更小的数据量,更高的帧率,以及更小的存储电路面积开销。而粗量化+细量化的方式可以使得无须在高频的时钟输入的情况下就可以达到很高的量化精度。
技术研发人员:聂凯明,吴浩然,徐江涛
受保护的技术使用者:天津天芯微系统集成研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!