一种雷达数据的处理方法及装置与流程
本发明设计通信,尤其涉及一种雷达数据的处理方法及装置。
背景技术:
1、随着无人机技术的快速发展,“无人机入侵”事件频出,传统的单雷达探测手段已经无法满足市场需求。
2、为解决这一问题,近几年来,集雷达探测、光电识别和干扰诱骗处置于一体的低空近程防御系统快速发展,成为低空防御的主力军。为了满足系统的快速响应能力,低空近程防御系统对雷达设备要求越来越高,高探测精度和高稳定跟踪能力也成为低空近程防御系统探测雷达的关键性能指标。
技术实现思路
1、本发明提供了一种雷达数据的处理方法及装置,用于提升雷达探测的数据率,进而提高雷达追踪过程的稳定性和探测精度。
2、第一方面,本发明提供了一种雷达数据的处理方法,应用于搜跟一体式雷达,方法包括:
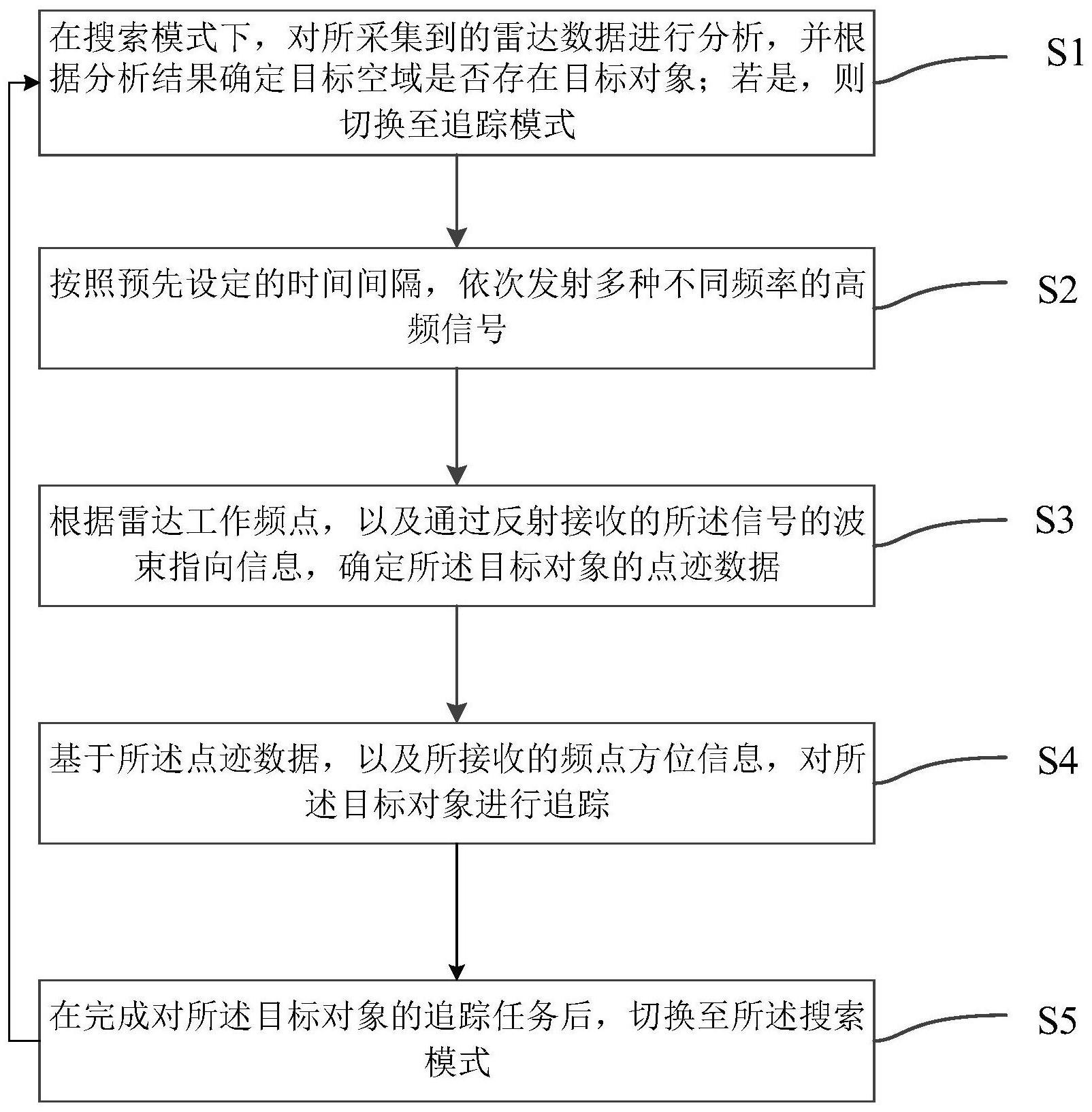
3、s1,在搜索模式下,对所采集到的雷达数据进行分析,并根据分析结果确定目标空域是否存在目标对象;若是,则切换至追踪模式,并执行步骤s2;
4、s2,按照预先设定的时间间隔,依次发射多种不同频率的高频信号;
5、s3,根据雷达工作频点,以及通过反射接收的所述信号的波束指向信息,确定所述目标对象的点迹数据;
6、s4,基于所述点迹数据,以及所接收的频点方位信息,对所述目标对象进行追踪;
7、s5,在完成对所述目标对象的追踪任务后,切换至所述搜索模式,并返回所述步骤s1。
8、可选地,所述步骤s3包括:
9、s31,根据所述雷达工作频点,以及所述波束指向信息,合成得到数字多波束合成信号;
10、s32,对所述数字多波束合成信号进行数据处理,确定所述点迹数据。
11、可选地,所述步骤s4包括:
12、s41,剔除距离所述追踪目标预设范围之外的所述点迹数据,得到目标点迹数据;
13、s42,基于所述目标点迹数据和所述频点方位信息,确定所述目标对象的运动轨迹和运动状态数据;
14、s43,基于所述目标对象的所述运动轨迹和所述运动状态数据,对所述目标对象进行追踪。
15、可选地,所述步骤s42包括:
16、s421,连接所述目标点迹数据,得到对应的目标航迹数据;
17、s422,基于所述目标航迹数据,确定所述目标对象的所述运动轨迹;
18、s423,按照平均加权的方法对所述目标点迹数据进行凝聚处理,得到所述目标对象的所述运动状态数据。
19、可选地,所述步骤s31之前,还包括:
20、对接收通道进行校正。
21、第二方面,本发明提供了一种雷达数据的处理装置,包括:
22、响应模块,用于响应于跟踪命令,按照预先设定的时间间隔,依次发射多种不同频率的高频信号;
23、合成模块,用于根据雷达工作频点,以及通过反射接收的所述信号的波束指向信息,合成得到数字多波束合成信号;
24、点迹数据确定模块,用于从所述信号波束中确定目标对象的点迹数据;
25、运动数据确定模块,用于根据所述点迹数据,以及所接收的频点方位信息,确定所述目标对象的运动轨迹和运动状态数据;
26、追踪模块,用于基于所述目标对象的所述运动轨迹和所述运动状态数据,对所述目标对象进行追踪。
27、所述点迹数据确定模块包括:
28、合成子模块,用于根据所述雷达工作频点,以及所述波束指向信息,合成得到数字多波束合成信号;
29、点迹数据确定子模块,用于对所述数字多波束合成信号进行数据处理,确定所述点迹数据。
30、第三方面,本申请提供一种电子设备,包括处理器以及存储器,所述存储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行如上述第一方面提供的所述方法中的步骤。
31、第四方面,本申请提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时运行如上述第一方面提供的所述方法中的步骤。
32、第五方面,本申请提供一种计算机程序产品,其上存储有计算机程序,所述计算机程序在所述处理器执行时运行如上述第一方面提供的所述方法中的步骤。
33、从以上技术方案可以看出,本发明具有以下优点:
34、本发明提供了一种雷达数据的处理方法及装置,应用于搜跟一体式雷达,方法包括:s1,在搜索模式下,对所采集到的雷达数据进行分析,并根据分析结果确定目标空域是否存在目标对象;若是,则切换至追踪模式,并执行步骤s2;s2,按照预先设定的时间间隔,依次发射多种不同频率的高频信号;s3,根据雷达工作频点,以及通过反射接收的所述信号的波束指向信息,确定所述目标对象的点迹数据;s4,基于所述点迹数据,以及所接收的频点方位信息,对所述目标对象进行追踪;s5,在完成对所述目标对象的追踪任务后,切换至所述搜索模式,并返回所述步骤s1。基于频率捷变技术,对数字多波束合成,以及点迹航迹的处理,从而提升雷达探测的数据率,进而提高雷达追踪过程的稳定性和探测精度。
技术特征:
1.一种雷达数据的处理方法,其特征在于,应用于搜跟一体式雷达,方法包括:
2.根据权利要求1所述的雷达数据的处理方法,其特征在于,所述步骤s3包括:
3.根据权利要求1所述的雷达数据的处理方法,其特征在于,所述步骤s4包括:
4.根据权利要求3所述的雷达数据的处理方法,其特征在于,所述步骤s42包括:
5.根据权利要求2所述的雷达数据的处理方法,其特征在于,所述步骤s31之前,还包括:
6.一种雷达数据的处理装置,其特征在于,应用于搜跟一体式雷达,装置包括:
7.根据权利要求6所述的雷达数据的处理装置,其特征在于,所述点迹数据确定模块包括:
8.一种电子设备,其特征在于,包括处理器以及存储器,所述存储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行如权利要求1-5任一项所述的方法。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时运行如权利要求1-5任一项所述的方法。
10.一种计算机程序产品,其特征在于,所述计算机程序产品在处理器上运行时执行如权利要求1-5任一项所述的方法。
技术总结
本申请提供的一种雷达数据的处理方法及装置,应用于搜跟一体式雷达,方法包括:S1,在搜索模式下,对所采集到的雷达数据进行分析,并根据分析结果确定目标空域是否存在目标对象;若是,则切换至追踪模式,并执行步骤S2;S2,按照预先设定的时间间隔,依次发射多种不同频率的高频信号;S3,根据雷达工作频点,以及通过反射接收的所述信号的波束指向信息,确定所述目标对象的点迹数据;S4,基于所述点迹数据,以及所接收的频点方位信息,对所述目标对象进行追踪;S5,在完成对所述目标对象的追踪任务后,切换至所述搜索模式,并返回所述步骤S1。从而提升雷达探测的数据率,进而提高雷达追踪过程的稳定性和探测精度。
技术研发人员:程泉,吴源昭,何文洲,蒋文,马佳骏,柳鹏程
受保护的技术使用者:四川九洲防控科技有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!