基于系统噪声估计的光电吊舱自适应EKF目标定位方法与流程
本发明涉及基于系统噪声估计的光电吊舱自适应ekf目标定位方法,属于机载光电吊舱目标定位。
背景技术:
1、机载光电吊舱集可见光摄像机、红外热像仪和激光测距仪等设备于一体,是无人机装备的重要任务载荷。随着机载光电吊舱向多功能、智能化方向发展,其被广泛应用于海上搜救、目标侦察监视、战场态势评估等一系列领域,其中,地面关键目标的高精度定位,对野外救援、激光制导打击等具有重要意义。
2、目前,基于激光测距和惯组姿态角度的有源定位方法精度较高,将卡尔曼滤波及其扩展算法用于光电吊舱的目标定位之中,能以线性最小方差状态估计方法给出地面目标的最优估计坐标。然而,对于在卡尔曼滤波器应用过程中有关滤波器参数的设定,如系统噪声方差与测量噪声方差,将对滤波结果产生巨大影响。
3、一般测量噪声取决于传感器自身的测量误差,可从传感器性能手册中获取测量噪声方差的数据;而对于系统噪声而言,常常根据经验来选取,具有一定的随机性。不同的系统噪声方差取值对滤波结果影响较大。在实际机载光电吊舱对地面目标进行激光测距定位过程中,系统噪声会受到目标测距距离、光轴稳定性、图像目标跟踪精度的影响,存在时变的特性,现有遗忘因子、期望最大化和遗传迭代等方法,虽能实现对系统噪声方差的调整,但这些方法计算过程均繁琐费时,无法满足实际应用中的实时性要求。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出基于系统噪声估计的光电吊舱自适应ekf目标定位方法,实现目标运动状态准确估计,用于无人机目标侦查、机载光电吊舱视觉伺服跟踪。
2、本发明解决技术的方案是:
3、基于系统噪声估计的光电吊舱自适应ekf目标定位方法,包括:
4、无人机挂载光电吊舱进行巡航飞行,光电吊舱的基座上安装惯导,通过地面站操作光电吊舱,使视场中心锁定地面目标,进行激光测距获得光电吊舱与地面目标之间的距离l;
5、根据光电吊舱图像跟踪目标时的水平脱靶量、垂直脱靶量与光电吊舱与地面目标之间的距离l,计算目标定位模型的系统噪声q;
6、建立目标定位的状态方程与观测方程,根据光电吊舱自身的经纬度坐标、光电吊舱与地面目标之间的距离l与系统噪声q,采用ekf滤波算法计算地面目标的地理坐标值,用于对光电吊舱进行目标跟踪。
7、进一步的,通过地面站操作光电吊舱的方法包括:
8、通过地面站摇杆搜寻并锁定地面目标,使吊舱处于稳定的目标图像跟踪状态;吊舱激光测距仪上电,对图像锁定的地面目标进行激光测距,记录光电吊舱与地面目标之间的距离l、吊舱基座惯组的gps坐标以及图像跟踪的水平、垂直脱靶量。
9、进一步的,目标定位模型中的系统噪声q的计算方法包括:
10、基于载荷视轴与地面目标的偏差角度、光电吊舱与地面目标之间的距离,计算第k时刻,激光测距点偏离实际目标的距离为:
11、
12、其中lk为k时刻光电吊舱与地面目标之间的距离,μxk为视轴水平偏差角,μyk为视轴垂直偏差角;
13、统计计算一段时间内偏离目标距离[δγ1,δγ2...δγk]的方差值,即可得到目标定位模型中的系统噪声q。
14、进一步的,在跟踪地面目标的过程中,采样点以滑窗的形式随时间后移更新,进而重新统计与计算滑窗内的偏离目标距离数据,实时更新相应系统噪声方差。
15、进一步的,通过k时刻查询可见光相机焦距值,获得当前图像水平视场角为κk,垂直视场角为λk,图像的水平与垂直方向的总像素数分别为m、n,根据水平脱靶量mk与垂直脱靶量nk计算载荷视轴偏离目标的角度为:
16、
17、进一步的,建立目标定位的观测方程的方法包括:
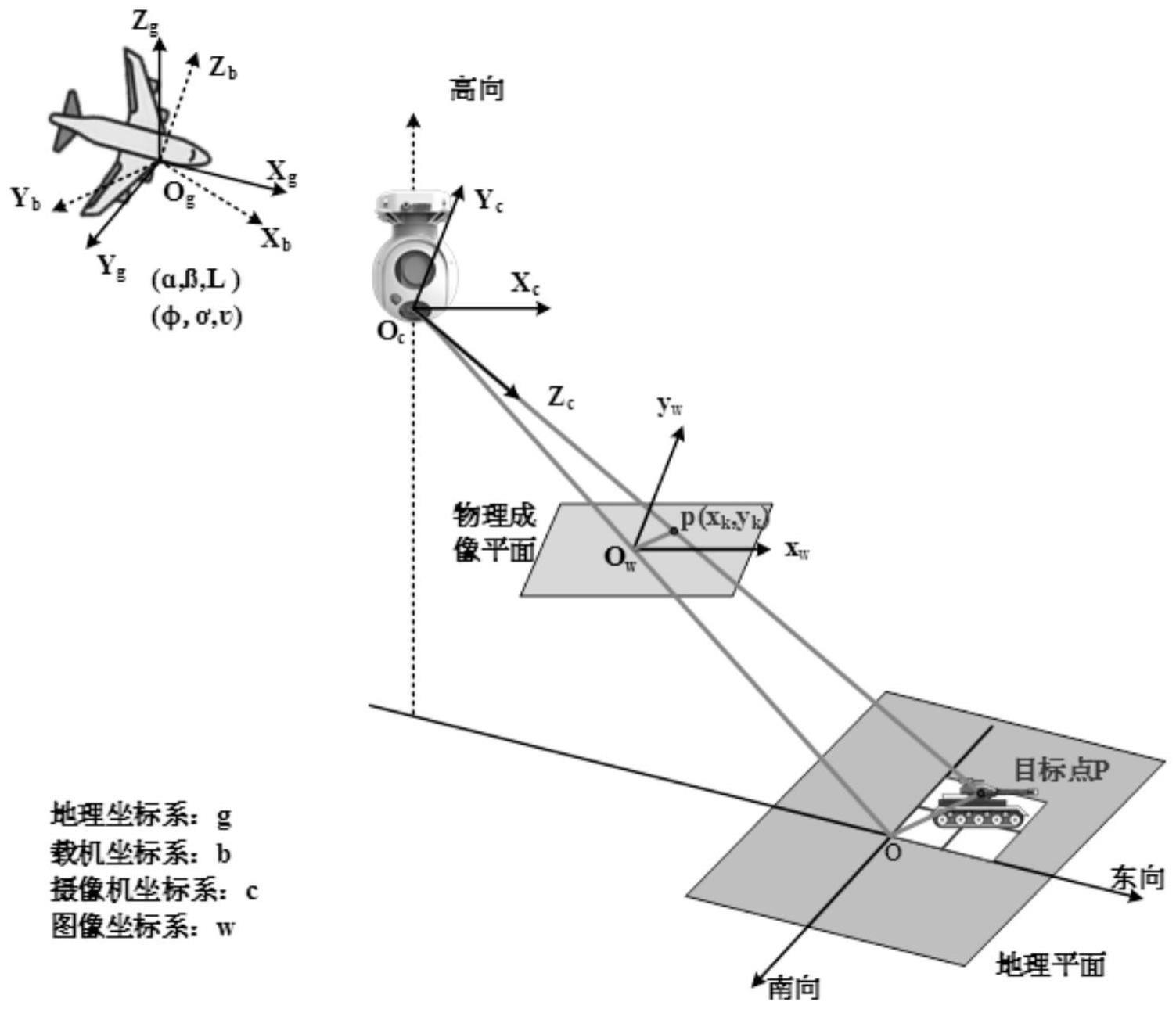
18、在k时刻获取目标相对于光电吊舱的方位姿态角α、俯仰姿态角β,以无人机吊舱为原点,目标在机体坐标系下的位置为(xbk,ybk,zbk),以α,β,l的测量值为观测量,建立目标定位系统的观测方程为:
19、
20、进一步的,所建立的状态与观测方程具有非线性特性,采用扩展卡尔曼滤波算法对目标位置进行估计,将h(xk)在处进行一阶taylor级数展开,省略二阶及以上项,得到线性化后的观测方程为:
21、
22、其中,υk为第k时刻的观测噪声,为线性化后的观测矩阵。
23、进一步的,基于线性化后的状态与观测方程,具体迭代过程如下:
24、状态一步预测:
25、
26、一步预测均方误差:
27、
28、滤波增益更新:
29、
30、状态估计更新:
31、
32、状态估计误差更新:
33、
34、其中,φk|k-1表示tk-1时刻系统的一步转移矩阵,γk|k-1表示tk-1时刻系统的噪声驱动矩阵,hk表示线性化后的观测矩阵,qk-1表示tk-1时刻的系统噪声方差矩阵,rk表示tk时刻的系统的噪声驱动矩阵。
35、进一步的,光电吊舱在进行目标定位时,采集到的吊舱基座经纬度坐标为(n0,w0,h0),按照下式计算地面目标的经度、纬度、高程坐标(ntar,wtar,htar)为:
36、
37、
38、
39、式中,re为地球半径。
40、进一步的,状态方程的表达式为:
41、xk=φxk-1+wk-1
42、其中,xk=[xk,yk,zk]t为tk时刻的目标状态,φ为单位矩阵,wk-1为系统噪声。
43、基于系统噪声估计的光电吊舱自适应ekf目标定位系统,包括:
44、光电吊舱与地面目标之间距离获得模块:无人机挂载光电吊舱进行巡航飞行,光电吊舱的基座上安装惯导,通过地面站操作光电吊舱,使视场中心锁定地面目标,进行激光测距获得光电吊舱与地面目标之间的距离l;
45、目标定位模型的系统噪声确定模块:根据光电吊舱图像跟踪目标时的水平脱靶量、垂直脱靶量与光电吊舱与地面目标之间的距离l,计算目标定位模型的系统噪声q;
46、地面目标地理坐标值确定模块:建立目标定位的状态与观测方程,根据光电吊舱自身的经纬度坐标、光电吊舱与地面目标之间的距离l与系统噪声q,采用ekf滤波算法计算地面目标的地理坐标值,用于对光电吊舱进行目标跟踪。
47、本发明与现有技术相比的有益效果是:
48、(1)对于目前ekf滤波器应用过程中的系统噪声方差,一般是通过经验选取的固定数值,这在一定程度上存在随机性,不同的选取值会对ekf的滤波结果产生巨大影响;同时,在实际机载光电吊舱对地面目标进行激光测距定位过程中,系统噪声会受到目标测距距离、光轴稳定性、图像目标跟踪精度的影响,是动态变化的过程。采用本发明方法能够始终保持系统噪声统计量自适应的逼近真实值,减少传统卡尔曼滤波算法中,因系统噪声选用常值可能导致结果发散的风险,从而实现机载光电吊舱对地面目标的高精度定位;
49、(2)现有遗忘因子、期望最大化和遗传算法等加入扩展卡尔曼滤波模型中,虽能实现对系统噪声方差的调整,但这些方法计算过程均繁琐费时,无法满足实际应用中的实时性要求。本发明所提出的系统噪声估计算法,仅需激光测距值与图像跟踪脱靶量进行统计计算,运算量小,便于部署在嵌入式系统中,具有较高的实用性。
- 还没有人留言评论。精彩留言会获得点赞!