一种接触线几何参数的实时检测方法
本发明涉及接触线检测,尤其涉及一种接触线几何参数的实时检测方法。
背景技术:
1、城市轨道交通目前是国际公认的低能耗、大运量的绿色交通,以其速度快、效率高、污染小等特点,成为当今缓解城市交通压力的首选。接触网-受电弓系统是城市轨道交通牵引供电系统中的关键设施,主要承担电客车动力的供给职能,它的可靠性直接影响电客车运行的安全,而接触网几何参数是反映弓网受流状况的重要指标。接触网几何参数主要包括拉出值和导高值,都有一定的技术指标规范。为了降低接触线与受电弓之间的磨耗,将接触线在直线路段按“之”字形状布设,使受电弓的碳滑板与接触线均匀摩擦,延长二者使用寿命。接触网的拉出值如果设置过小则无法起到均匀摩擦受电弓碳滑板的目的,如果设置过大,遇上大风等恶劣天气可能造成脱弓、断线等事故。导高值过大,会因为接触压力不够导致离线进而产生燃弧烧蚀接触线;导高值过小,接触压力过大,对碳滑板及接触线的磨损过大。
2、当今我国采用的接触网几何参数检测方法主要是专业的技术人员手动检测以及运用检测车进行自动化检测。专业技术人员进行手动检测一般使用ddj或tdj多功能手持式检测仪,人力和物力消耗大而且效率非常低。采用检测车检测的方式提高了精度和效率,但检测时占用线路,干扰客车正常运行,且在不同的检测参数项目下必须安装不同设备,无法满足检测条件的多样化需求。因此,本领域亟需一种接触线几何参数的实时检测方法来解决上述问题。
技术实现思路
1、本发明所要解决的技术问题是克服现有技术中存在的不足,提供一种接触线几何参数的实时检测方法,用以解决接触线几何参数检测的问题。
2、在第一方面,本发明提供一种接触线几何参数的实时检测方法,包括以下步骤:
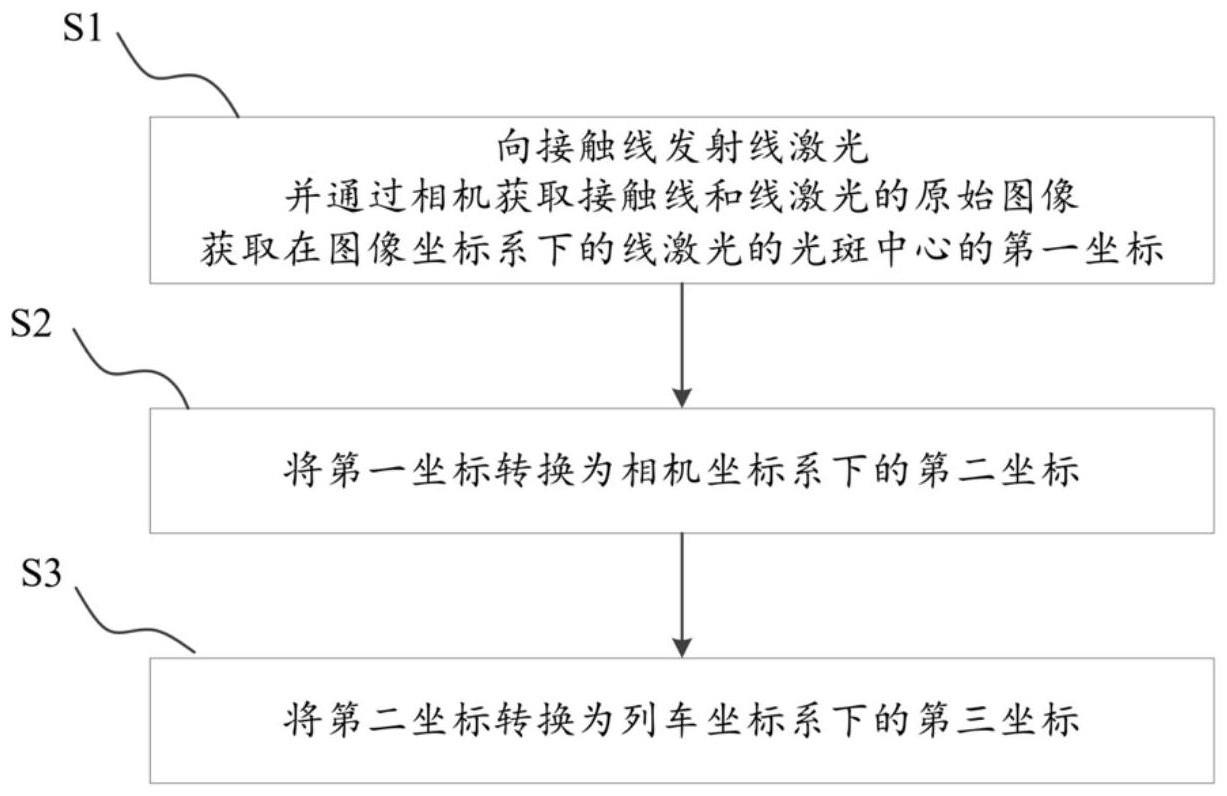
3、向接触线发射线激光,并通过相机获取所述接触线和所述线激光的原始图像,获取在图像坐标系下的所述线激光的光斑中心的第一坐标;
4、将所述第一坐标转换为相机坐标系下的第二坐标;
5、将所述第二坐标转换为列车坐标系下的第三坐标。
6、在上述实时检测方法的具体实施方式中,“向接触线发射线激光,并通过相机获取所述接触线和所述线激光的原始图像,获取在图像坐标系下的所述线激光的光斑中心的第一坐标”包括:
7、以第一频率向接触线发射所述线激光,以第二频率驱使所述相机获取所述原始图像,所述第一频率为所述第二频率的一半,以使所述原始图像的相邻帧分别为有激光光斑图像和无激光光斑图像;
8、对所述原始图像依次进行相邻帧差分处理、阈值分割处理、灰度化处理、中值滤波处理和数字形态学处理,获取第一图像;
9、根据所述第一图像,获取所述线激光的光斑中心的第一坐标。
10、在上述实时检测方法的具体实施方式中,“根据所述第一图像,获取所述线激光的光斑中心的第一坐标”包括:
11、根据所述第一图像,获取所述线激光的光斑轮廓;
12、根据所述原始图像,获取在所述图像坐标系下的接触线直线方程;
13、根据所述接触线直线方程,采用灰度重心法从所述光斑轮廓中获取所述第一坐标。
14、在上述实时检测方法的具体实施方式中,“根据所述原始图像,获取在所述图像坐标系下的接触线直线方程”包括:
15、对所述原始图像依次进行sobel边缘检测处理、骨架提取处理,获取第二图像;
16、从所述第二图像中获取所述接触线的直线;
17、根据所述直线获取所述接触线直线方程。
18、在上述实时检测方法的具体实施方式中,“将所述第一坐标转换为相机坐标系下的第二坐标”包括:
19、获取所述图像坐标系与所述相机坐标系的转换关系;
20、根据所述转换关系,将图像坐标系下的所述第一坐标转换为相机坐标系下的第二坐标。
21、在上述实时检测方法的具体实施方式中,“获取所述图像坐标系与所述相机坐标系的转换关系”包括:
22、设置所述相机和标定平面,所述标定平面上设置有目标点;
23、所述标定平面,使所述相机获取所述目标点的第一标定图像,根据所述第一标定图像对所述相机进行标定,获取所述相机的参数;
24、向所述标定平面发射线激光,以形成激光条纹,使所述相机获取所述激光条纹的第二标定图像,根据所述第二标定图像获取所述相机的光心与所述标定平面的距离;
25、根据所述参数与所述距离,获取所述图像坐标系与所述相机坐标系的转换关系。
26、在上述实时检测方法的具体实施方式中,“向接触线发射线激光”包括:
27、采用单一波长的线激光器向接触线发射线激光,且在所述线激光器上设置与其波长适配的滤光片。
28、在采用上述技术方案的情况下,本发明的能够实时获取接触线的位置信息。
29、进一步地,采用帧间差分与图像处理的方式提取接触线上的激光光斑,再结合边缘检测提取并跟踪接触线,根据激光光斑是否位于接触线上来判断激光光斑定位是否准确。此方法能有效应对在线岔、锚段关节等位置以及相机视角中具有多条接触线和承力索的复杂场景下的接触网几何参数检测,增加了检测的可靠性,且具有较强的抗干扰能力。
30、进一步地,采用相机和线激光联合标定,进行结构光三维重建,事先得到深度信息,更能满足列车高速运行过程中减少计算量、提升实时性的测量需求,此外本方法设备结构简单,成本较低。
31、进一步地,采用单一波长的线激光器向接触线发射线激光,且在线激光器上设置与其波长适配的滤光片,这样能够去除外界红光的干扰。
技术特征:
1.一种接触线几何参数的实时检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的实时检测方法,其特征在于,“向接触线发射线激光,并通过相机获取所述接触线和所述线激光的原始图像,获取在图像坐标系下的所述线激光的光斑中心的第一坐标”包括:
3.根据权利要求2所述的实时检测方法,其特征在于,“根据所述第一图像,获取所述线激光的光斑中心的第一坐标”包括:
4.根据权利要求3所述的实时检测方法,其特征在于,“根据所述原始图像,获取在所述图像坐标系下的接触线直线方程”包括:
5.根据权利要求1所述的实时检测方法,其特征在于,“将所述第一坐标转换为相机坐标系下的第二坐标”包括:
6.根据权利要求5所述的实时检测方法,其特征在于,“获取所述图像坐标系与所述相机坐标系的转换关系”包括:
7.根据权利要求1-6中任一项所述的实时检测方法,其特征在于,“向接触线发射线激光”包括:
技术总结
本发明涉及接触线检测技术领域,具体提供一种接触线几何参数的实时检测方法,旨在解决接触线几何参数检测的问题。为此目的,本发明的一种接触线几何参数的实时检测方法,包括以下步骤:向接触线发射线激光,并通过相机获取所述接触线和所述线激光的原始图像,获取在图像坐标系下的所述线激光的光斑中心的第一坐标;将所述第一坐标转换为相机坐标系下的第二坐标;将所述第二坐标转换为列车坐标系下的第三坐标,本发明的能够实时获取接触线的位置信息。
技术研发人员:刘全利,岳雅,王伟
受保护的技术使用者:大连理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!