一种用于光纤陀螺的光纤环、加工装置及加工方法与流程
本发明涉及光纤环领域,特别涉及一种用于光纤陀螺的光纤环、加工装置及加工方法。
背景技术:
1、光纤陀螺是应用sagnac效应测试旋转角速度的全固态陀螺仪,它将同一光源发出的一束光分解为两束,让这两束光在同一个环路内沿相反方向循行一周后会合产生干涉,这就是sagnac效应。光纤陀螺具有结构简单、动态范围宽、启动时间短、抗冲击能力强等特点,已成为惯性测量和制导技术领域的主流仪表之一。
2、现有光纤环在生产过程中,工作人员需要手动拿起光纤环骨架,以找到光纤环骨架具有出纤螺线槽的那侧,然后再进行光纤环于光纤环骨架上的绕制,上述步骤较为繁琐;同时,还缺少方便快捷的对光纤环骨架进行绕制的结构,实际生产效率不高。
技术实现思路
1、本发明的目的是提供一种用于光纤陀螺的光纤环、加工装置及加工方法,以解决背景技术中所提出的问题。
2、本发明的上述技术目的是通过以下技术方案得以实现的:
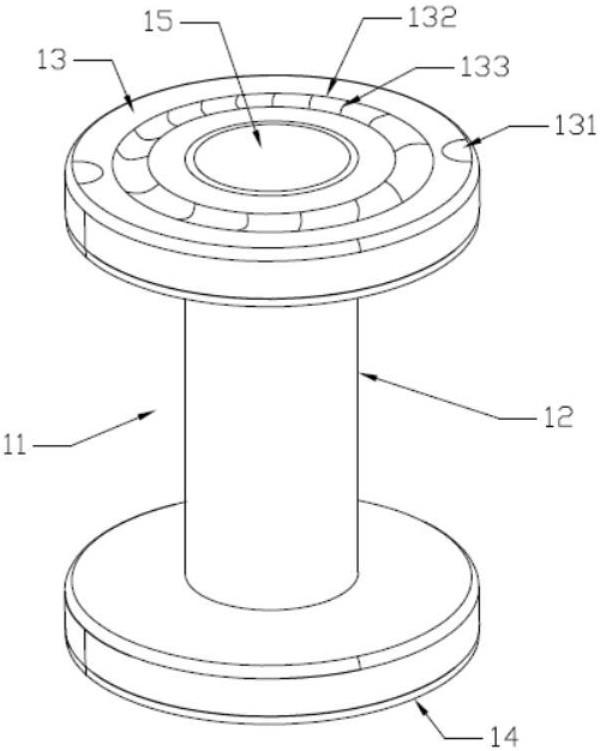
3、为了达到上述目的,本发明提供了一种用于光纤陀螺的光纤环,包括有光纤环骨架,所述的光纤环骨架为工字环结构,所述的光纤环骨架上下端之间的外环壁为光纤绕制环面,所述的光纤环骨架的上端部设置有为光纤盘装面,并在所述的光纤盘装面上设置有两个分别供光纤环的两个端部穿出的出纤螺线槽;
4、于所述的光纤盘装面绕着中心开设有环形槽,并在所述的环形槽中阻尼嵌设有环形磁块,所述的光纤环骨架的下端部设置有平滑底面;
5、于所述的光纤环骨架的光纤盘装面的中心处开设有定位凹陷。
6、为了达到上述目的,本发明还提供了一种光纤环的加工装置,包括有:
7、用于输送光纤环骨架的输送单元;
8、设置在输送单元后级的绕制单元;其中,
9、所述的输送单元上设置有用于检测光纤环骨架位置的位置调整组件,基于该位置调整组件能让各光纤环骨架的光纤盘装面均朝向同侧。
10、进一步设置是:所述的输送单元包括有输送台,所述的输送台上设置有输送带,所述的输送带上设置有驱动轴,所述的输送台下端的内外两侧均固定设置下端挡板,两个所述的下端挡板的下端均固定在底部支撑板上,于所述的底部支撑板上固定设置有主驱动电机,所述的主驱动电机的输出轴通过传动条与驱动轴相接,基于该主驱动电机的动作来带动输送带运动;
11、所述的位置调整组件包括有多个定位座,各所述的定位座规则的固定在输送带上,且各所述的定位座之间间隔设置;各所述的定位座上的上端均可转动的设置有转动放置盘,所述的定位座内部设置有小型驱动电机,所述的小型驱动电机的输出轴朝上设置并固定在所述的转动放置盘上,为转动放置盘提供转动的驱动力,所述的转动放置盘的上端开设有供光纤环骨架的两个端部躺放的限位槽,通过两个所述的限位槽来起到限位光纤环骨架的作用;于所述的输送台的内侧固定设置有纵向的延伸挡板,所述的延伸挡板上固定设置有第一霍尔传感器,所述的第一霍尔传感器的设置高度高于转动放置盘;放置有所述的光纤环骨架的定位座在输送带的带动下,会经过所述的第一霍尔传感器,所述的第一霍尔传感器与主驱动电机和各小型驱动电机构成导电连接。
12、进一步设置是:所述的绕制单元包括有作为承载结构的基座,所述的基座的上端开设有凹陷的过道,所述的输送台伸入至过道中,在所述的过道中固定设置有与输送台相接的滑道;
13、所述的基座的左侧内壁上固定设置有步进电机,所述的步进电机的输出轴穿至基座的左侧外壁,并在其上固定设置有第一驱动轮,所述的基座的左侧外壁上可转动的设置有第二驱动轮和第三驱动轮,所述的第二驱动轮位于第一驱动轮的上方并与第一驱动轮之间通过第一传动带连接,所述的第二驱动轮上固定设置有横向穿过基座并伸入至其内侧的传动杆,所述的基座的前端固定设置有两个驱动气缸,两个所述的驱动气缸上均设置有朝向右侧延伸的延伸臂,两个所述的延伸臂的端部固定在同一个纵向连接板上,所述的纵向连接板的右端固定设置有延伸套环,所述的传动杆伸入并限位在延伸套环中,该传动杆能带动延伸套环同步转动;所述的延伸套环的右端固定设置有延伸直板,并在所述的延伸直板的右端固定设置有左夹持臂;
14、所述的第三驱动轮位于第一驱动轮的下方并与之啮合,所述的第三驱动轮上固定设置有横向穿过基座并伸出基座的右侧外壁的下转动杆,所述的下转动杆的右端部固定设置有第四驱动轮,所述的下转动杆的上方设置有上转动杆,所述的上转动杆的右端部固定设置有第五驱动轮,该第五驱动轮与第四驱动轮之间通过第二传动带连接,所述的上转动杆横向穿过基座并伸入至其内侧,所述的上转动杆的左侧端部固定设置有右夹持臂;所述的左夹持臂和右夹持臂之间形成有夹持间距,位于所述的输送台上的光纤环骨架会经过该夹持间距,并由左夹持臂和右夹持臂夹持固定;
15、所述的左夹持臂与光纤环骨架的光纤盘装面相接触,所述的右夹持臂与光纤环骨架的平滑底面相接触;
16、所述的基座后端固定设置有出线管,光纤环可从出线管引出,该出线管靠近左夹持臂。
17、进一步设置是:所述的延伸套环内开设有限位凹陷,所述的传动杆固定设置有可伸入至限位凹陷内的限位凸块。
18、进一步设置是:所述的上转动杆的左端部内开设有安装槽,并在所述的安装槽内设置有红外传感器,所述的红外传感器用于检测光纤环骨架的位置;在所述的上转动杆上开设有与安装槽相通的过线孔,所述的安装槽的槽口处固定设置有透光玻璃。
19、进一步设置是:所述的基座前端固定设置有安装侧板,并在所述的安装侧板上固定设置有纵向的支杆,所述的支杆上固定设置有第二霍尔传感器,所述的第二霍尔传感器朝向下转动杆设置,所述的下转动杆上固定设置有一小型磁块。
20、进一步设置是:所述的左夹持臂的端部固定设置有外凸定位段,所述的外凸定位段能嵌入至光纤环骨架的光纤盘装面中心的定位凹陷。
21、为了达到上述目的,本发明还提供了一种光纤环的加工方法,包括有以下步骤:
22、步骤s1、主驱动电机工作并带动输送带运动,将光纤环骨架躺放在定位座的转动放置盘上端;
23、步骤s2、当定位座在输送带的带动下经过第一霍尔传感器时;
24、若光纤环骨架的平滑底面朝向第一霍尔传感器一侧,第一霍尔传感器不会产生对应的感应信号,此时无需调整光纤环骨架的位置,输送带继续运动,接着执行步骤s5;
25、若光纤环骨架的光纤盘装面朝向第一霍尔传感器一侧,第一霍尔传感器会产生对应的感应信号,此时需要调整光纤环骨架的位置,主驱动电机停止动作,让输送带处于停止状态;并执行步骤s3;
26、步骤s3、第一个定位座上的小型驱动电机启动,让对应转动放置盘进行180度的转动;
27、若第一霍尔传感器没有产生对应的感应信号,则说明位于第一霍尔传感器前方的转动放置盘进行了转动;接着执行步骤s4;
28、若第一霍尔传感器依旧产生对应的感应信号,则说明并非位于第一霍尔传感器前方的转动放置盘进行了转动,该第一个定位座上的小型驱动电机再次启动,让对应转动放置盘进行180度的转动实现回位;然后控制第二个定位座上的小型驱动电机启动,直至后续第n个定位座上的小型驱动电机启动后,第一霍尔传感器没有产生对应的感应信号;接着执行步骤s4;
29、步骤s4、主驱动电机工作,输送带继续运动;
30、步骤s5、光纤环骨架经过夹持间距,红外传感器检测到光纤环骨架,左夹持臂和右夹持臂对其夹持固定;
31、步骤s6、工作人员手动将光纤环从出线管拉出并绕在光纤环骨架的光纤绕制环面,步进电机工作,并带动左夹持臂和右夹持臂一同转动,来实现对光纤环骨架的绕制作业,绕制时,按照四极对称绕法,即第一层绕制a盘光纤,b盘随工装转动;第二层和第三层换为绕制b盘光纤,a盘光纤随工装转动;第四层换为绕制a盘光纤,b盘光纤随工装转动;以此类推,绕制n层光纤;
32、步骤s7、绕制作业结束后,左夹持臂和右夹持臂松开光纤环骨,工作人员将其取下并放置于滑道上进行收集。
33、本发明的有益效果在于:
34、1、在本发明中输送台的设置用于向前输送光纤环骨架,定位座上设置有转动放置盘,转动放置盘上开设有两个限位槽,两个限位槽用于供光纤环骨架的两端放置,进而光纤环骨架能躺放在转动放置盘上;定位座内设置的小型驱动电机,用于控制转动放置盘进行转动,进而实现对光纤环骨架位置的调整;延伸挡板上固定设置有第一霍尔传感器,该第一霍尔传感器位于光纤环骨架需要经过的路径上,当经过第一霍尔传感器的光纤环骨架的平滑底面朝向第一霍尔传感器一侧时,由于该侧没有设置环形磁块,第一霍尔传感器不会产生对应的感应信号;当经过第一霍尔传感器的光纤环骨架的光纤盘装面朝向第一霍尔传感器一侧时,由于该侧设置有环形磁块,第一霍尔传感器会产生对应的感应信号,由此可以控制对应小型驱动电机工作,让转动放置盘进行180°的转向,达到调整位置的目的。
35、2、在本发明中第一驱动轮、第二驱动轮、第三驱动轮、第四驱动轮和第五驱动轮能实现动力传递,通过单独的步进电机便能输出动力,结构简单合理;左夹持臂和右夹持臂之间的夹持间距供输送台上的光纤环骨架经过,同时通过驱动气缸来控制左夹持臂移动,进而有效对光纤环骨架进行夹固,红外传感器的设置能见到光纤环骨架经过,便能控制驱动气缸来动作,实现自动化非常便捷;透光玻璃能防尘;出线管的设置方便工作人员进行绕制工作,出线管靠近左夹持臂,让工作人员能缩短操作距离,更加便捷;通过步进电机能带动左夹持臂和右夹持臂夹持一同转动,来进行绕制。
36、3、在本发明中延伸套环内开设有限位凹陷,传动杆上设置有伸入至限位凹陷内的限位凸块,由此为传动杆提供了横向活动的空间,即使驱动气缸控制延伸套环移动,传动杆也不会脱出延伸套环;同时限位凹陷和限位凸块的配合,也保证了传动杆能带动延伸套环一同转动。
37、4、在本发明中第二霍尔传感器和小型磁块的设置,能统计下转动杆转动的圈数,非常方便。
38、5、在本发明中外凸定位段和定位凹陷的设置,能让左夹持臂更好的对光纤环骨架进行夹持固定。
- 还没有人留言评论。精彩留言会获得点赞!