一种无人艇多源目标信息融合方法与流程
本发明属于无人艇,特别是一种无人艇多源目标信息融合方法。
背景技术:
1、海上环境复杂,为了无人艇安全的自主航行,艇上一般都配备多种传感器,以获取海上障碍物目标信息。但多个传感器探测的障碍目标信息较为复杂,容易产生虚警,为了能够保证目标信息的可信度,就需要对多源目标信息进行融合处理,综合各类信息形成实时航行态势。专利cn113687349a公开了一种基于多传感器融合的无人艇海面目标追踪方法及装置,该方法包括获取激光雷达采集的原始点云数据;获取毫米波雷达采集的原始毫米波数据;对所述原始点云数据和所述原始毫米波数据进行融合处理,得到融合后的目标信息;基于所述融合后的目标信息,对海面上的目标进行跟踪。专利cn 113484864b公开了一种面向无人艇的航海雷达与光电吊舱协同环境感知方法,包括以下内容:无人艇上安装固定航海雷达与光电吊舱,进行参数初始化;航海雷达对环境区域进行扫描,获得航海雷达图像,对航海雷达图像进行滤波处理,并进行目标筛选及目标特性分析,形成雷达感知目标分布图;光电吊舱对环境区域进行扫描,获得光电吊舱图像,采用改进的ssd目标检测算法对光电吊舱图像进行实时目标检测。现有无人艇信息融合方法方面的专利,一般多为两种源信息,并没有使用卫星地图进行融合,不具备全面性和可靠性。
2、因此,需要研究一种无人艇多源目标信息融合方法,保证障碍目标信息的准确度,从而提高无人艇自主航行的可靠性。
技术实现思路
1、本发明的目的在于针对上述现有技术存在的目标信息准确度不高的问题,提供一种无人艇多源目标信息融合方法,该方法具备准确度高和可靠性高等优点,可满足无人艇自主航行的信息融合需求。
2、实现本发明目的的技术解决方案为:一方面,提供了一种无人艇多源目标信息融合方法,所述方法包括以下步骤:
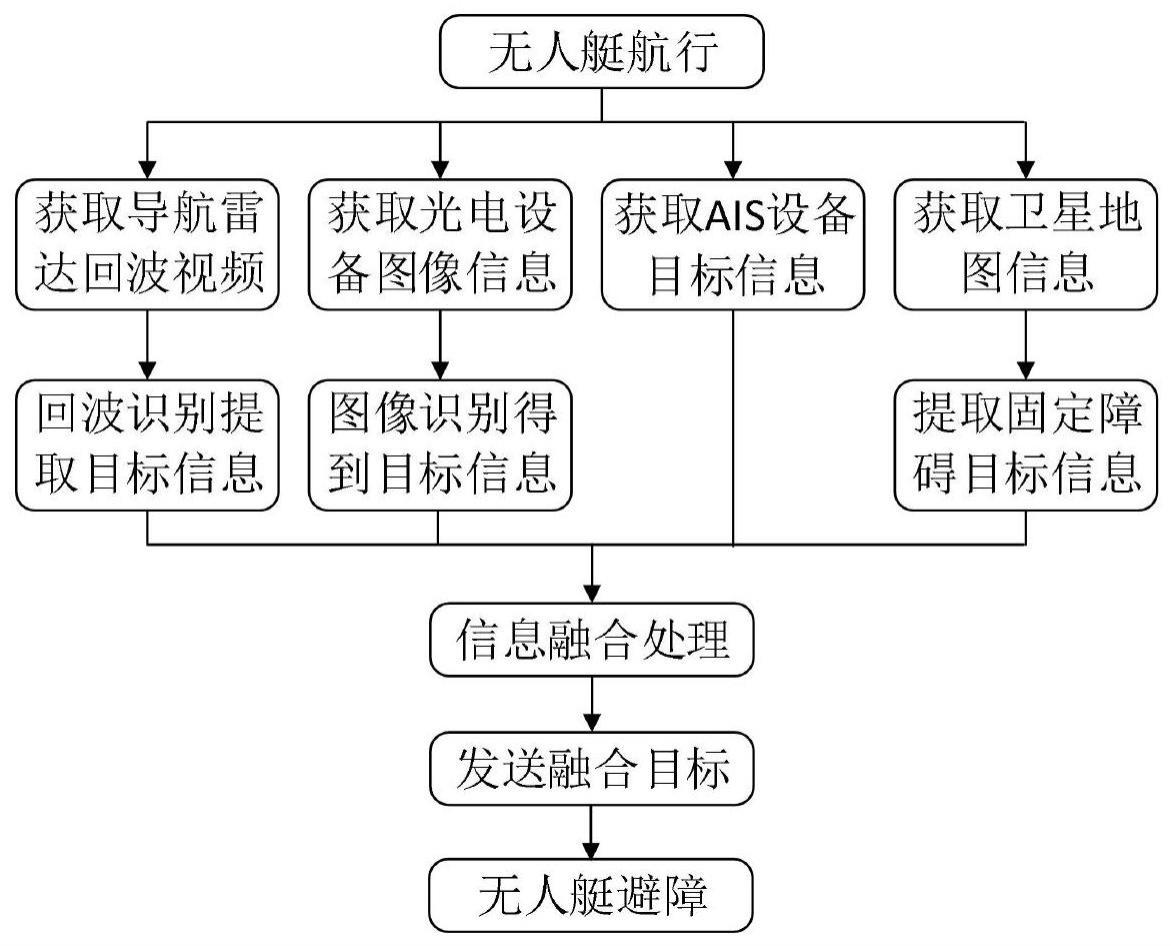
3、步骤1,获取导航雷达回波视频信息、光电设备图像信息,以及卫星地图信息和ais设备采集的障碍目标信息;
4、步骤2,对回波视频信息进行障碍目标识别,提取目标的方位、距离、航速和航向信息;
5、步骤3,对图像信息进行障碍目标识别,并对识别的目标进行跟踪测距,得到目标的方位和距离信息;
6、步骤4,基于卫星地图信息提取固定障碍目标信息;
7、步骤5,对步骤1至步骤3的障碍目标信息进行融合处理,获得融合目标,之后结合步骤4提取的固定障碍目标信息,形成无人艇周边综合环境态势,实现无人艇避障。
8、进一步地,步骤5中对步骤1至步骤3的障碍目标信息进行融合处理,具体为:以导航雷达探测的障碍目标为基础,针对动态障碍目标:对导航雷达获取的障碍目标信息和ais设备获取的障碍目标信息进行融合并确认,若不能确认,则继续对导航雷达获取的障碍目标信息与光电设备获取的障碍目标信息进行融合;针对静态目标:对导航雷达获取的障碍目标信息和光电设备获取的障碍目标信息进行融合。
9、进一步地,所述对导航雷达获取的障碍目标信息和ais设备获取的障碍目标信息进行融合,具体过程包括:
10、若导航雷达获取的障碍目标与ais设备获取的障碍目标的方位和距离均在设定的阈值内,则判定为同一障碍目标,并以ais设备获取的障碍目标信息为准,融合后的障碍目标信息即为ais设备获取的障碍目标信息。
11、进一步地,所述对导航雷达获取的障碍目标信息与光电设备获取的障碍目标信息进行融合,具体过程包括:
12、若导航雷达获取的障碍目标与光电设备获取的障碍目标的方位和距离均在设定的阈值内,则判定为同一障碍目标,若导航雷达目标稳定输出,则融合后的障碍目标信息为导航雷达获取的障碍目标信息,若光电设备目标稳定输出,则融合后的障碍目标信息为光电设备获取的障碍目标信息,若导航雷达目标和光电设备目标均稳定输出,则以光电设备障碍目标信息为准,融合后的障碍目标信息为光电设备获取的障碍目标信息。
13、进一步地,所述导航雷达、光电设备和ais设备均安装在无人艇中线上,且以导航雷达为中心,其他设备中心位置统一。
14、进一步地,所述导航雷达、光电设备和ais设备的信息描述格式统一,且均采用标准的通信协议。
15、进一步地,所述导航雷达、光电设备和ais设备均采用以太网形式进行数据传输。
16、另一方面,提供了一种无人艇多源目标信息融合系统,所述系统包括:导航雷达、光电设备、ais设备、卫星地图以及信息融合处理单元;
17、所述信息融合处理单元用于对导航雷达回波信息进行障碍目标识别,提取目标方位、距离、航速和航向信息;
18、所述信息融合处理单元用于对光电设备图像信息进行障碍目标识别,并对识别的目标进行跟踪测距,得到目标方位和距离信息;
19、所述信息融合处理单元用于通过ais设备获取周围船舶目标的方位、距离、航速和航向信息;
20、所述信息融合处理单元用于通过卫星地图获取固定障碍目标信息;
21、所述信息融合处理单元还用于对导航雷达、光电设备、ais设备获取的障碍目标信息进行融合,获得融合目标,之后结合提取的固定障碍目标,形成无人艇周边综合环境态势,实现无人艇避障。
22、本发明与现有技术相比,其显著优点为:1)基于导航雷达、光电设备、ais设备以及卫星地图等手段,获取目标位置等信息,明确统一的信息描述格式,明确数据传输接口,实现信息数据交互,多源信息可互补互备,提高了目标信息的稳定性;2)所有设备统一中心位置,提高了目标信息的准确性;3)无人艇航行过程中,信息融合处理单元将多传感器获取的障碍目标信息进行综合融合处理,并可将融合目标信息发送至航行控制系统,形成实时航行态势,从而实现无人艇的自主避障和安全航行。
23、下面结合附图对本发明作进一步详细描述。
技术特征:
1.一种无人艇多源目标信息融合方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的无人艇多源目标信息融合方法,其特征在于,步骤5中对步骤1至步骤3的障碍目标信息进行融合处理,具体为:以导航雷达探测的障碍目标为基础,针对动态障碍目标:对导航雷达获取的障碍目标信息和ais设备获取的障碍目标信息进行融合并确认,若不能确认,则继续对导航雷达获取的障碍目标信息与光电设备获取的障碍目标信息进行融合;针对静态目标:对导航雷达获取的障碍目标信息和光电设备获取的障碍目标信息进行融合。
3.根据权利要求2所述的无人艇多源目标信息融合方法,其特征在于,所述对导航雷达获取的障碍目标信息和ais设备获取的障碍目标信息进行融合,具体过程包括:
4.根据权利要求2所述的无人艇多源目标信息融合方法,其特征在于,所述对导航雷达获取的障碍目标信息与光电设备获取的障碍目标信息进行融合,具体过程包括:
5.根据权利要求1所述的无人艇多源目标信息融合方法,其特征在于,所述导航雷达、光电设备和ais设备均安装在无人艇中线上,且以导航雷达为中心,其他设备中心位置统一。
6.根据权利要求5所述的无人艇多源目标信息融合方法,其特征在于,所述导航雷达、光电设备和ais设备的信息描述格式统一,且均采用标准的通信协议。
7.根据权利要求5所述的无人艇多源目标信息融合方法,其特征在于,所述导航雷达、光电设备和ais设备均采用以太网形式进行数据传输。
8.基于权利要求1至7任意一项所述方法的无人艇多源目标信息融合系统,其特征在于,所述系统包括:导航雷达、光电设备、ais设备、卫星地图以及信息融合处理单元;
9.根据权利要求8所述的无人艇多源目标信息融合系统,其特征在于,所述导航雷达、光电设备和ais设备均安装在无人艇中线上,且以导航雷达为中心,测量光电设备到导航雷达的水平和高度方向上的间距,信息融合处理单元通过该间距值将光电设备的中心修正到导航雷达中心,实现中心位置统一。
技术总结
本发明公开了一种无人艇多源目标信息融合方法,该方法基于导航雷达、光电设备、AIS设备以及卫星地图等手段,获取目标位置等信息,且统一信息描述格式,明确数据传输接口,实现信息数据交互,多源信息可互补互备,提高了目标信息的稳定性,此外通过进行多源信息融合处理,得到更为准确可靠的目标信息,该方法具备全面性和可靠性,为无人艇的安全航行提供有效保障。
技术研发人员:祁明浩,梁立,孙之光,潘雁行,付悦文
受保护的技术使用者:连云港杰瑞科创园管理有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!