一种错时发波的多雷达数据融合方法、装置、设备及介质与流程
本发明涉及点云数据处理,尤其涉及一种错时发波的多雷达数据融合方法、装置、设备及介质。
背景技术:
1、为了满足辅助驾驶、自动避障等新兴需求,通常汽车上会搭载多个毫米波雷达,来实现对车辆周围环境的识别。一前四角是一种较为典型的车载毫米波雷达布置方案,采用一前四角的布置方案中,通常前雷达检测距离更远,角雷达检测角度更大,以便兼顾前向远距离检测和环视全向检测。但是这些毫米波雷达之间的视场fov有重叠。
2、在一些情况下,为了避免多个毫米波雷达一起工作时,相互之间产生干扰,会选择错时发波策略,即fov不重叠的雷达同时发波进行检测,fov有重叠的雷达错开一定时间发波,以尽量将多个雷达之间的相互干扰降到最低,以“一前四角”的布置方案为例,按照前雷达、左前雷达和右后雷达、左后雷达和右前雷达的顺序进行发波,错时发波有效降低了多雷达之间的相互干扰。
3、但是由于发波时间不一致,在进行多个雷达的数据融合时,雷达发波时的位置会存在一定偏差,在低速时,此类由于发波时间不一致导致的偏差影响十分有限,但在车辆速度较高时,会对数据融合和最终的目标检测造成比较大的影响,因此需要对此类情况进行处理,以提升检测结果的准确性。
技术实现思路
1、本发明提供了一种错时发波的多雷达数据融合方法、装置、设备及介质,以提高原始点云数据的准确性。
2、根据本发明的一方面,提供了一种错时发波的多雷达数据融合方法,包括:
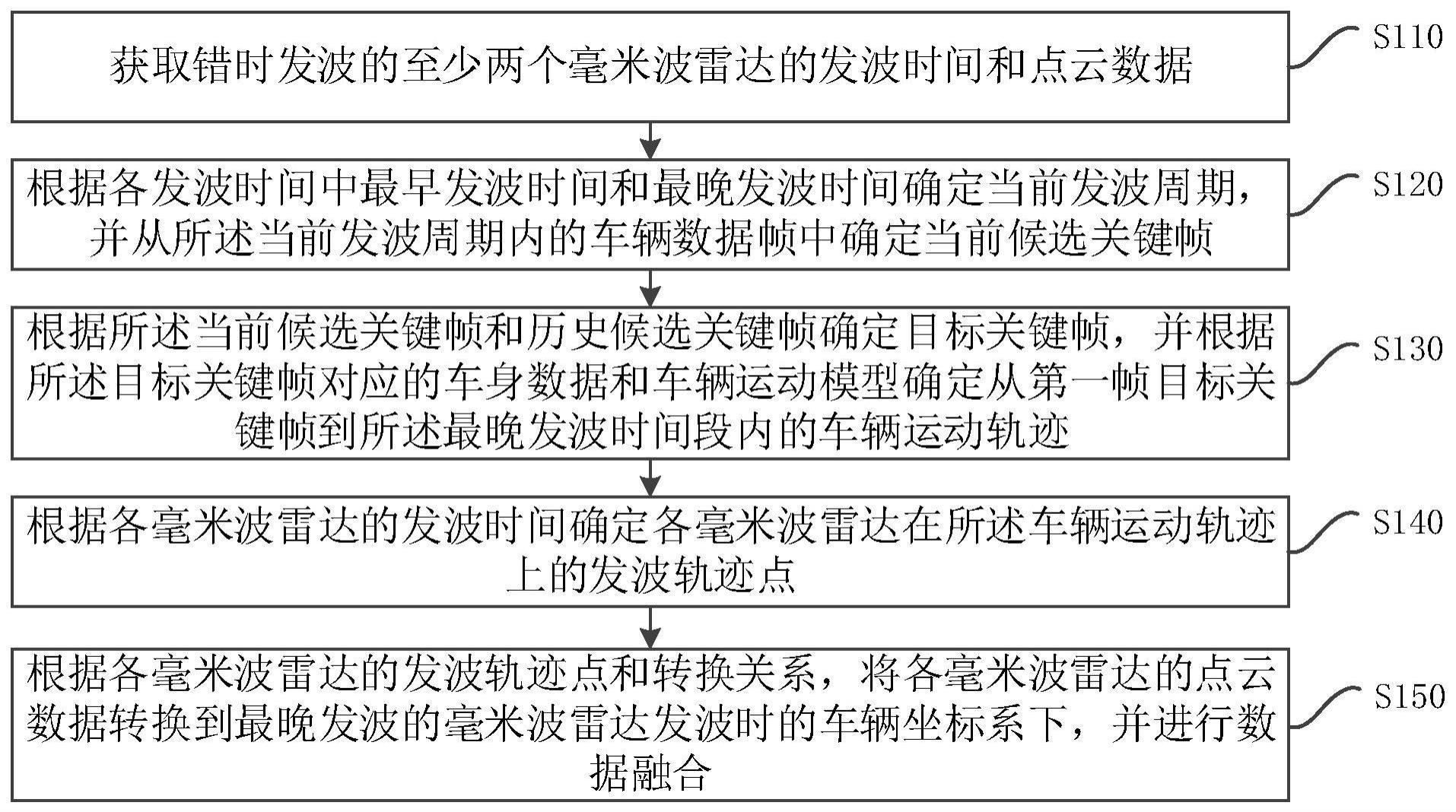
3、获取错时发波的至少两个毫米波雷达的发波时间和点云数据;
4、根据各发波时间中最早发波时间和最晚发波时间确定当前发波周期,并从所述当前发波周期内的车辆数据帧中确定当前候选关键帧;
5、根据所述当前候选关键帧和历史候选关键帧确定目标关键帧,并根据所述目标关键帧对应的车身数据和车辆运动模型确定从第一帧目标关键帧到所述最晚发波时间段内的车辆运动轨迹;
6、根据各毫米波雷达的发波时间确定各毫米波雷达在所述车辆运动轨迹上的发波轨迹点;
7、根据各毫米波雷达的发波轨迹点和转换关系,将各毫米波雷达的点云数据转换到最晚发波的毫米波雷达发波时的车辆坐标系下,并进行数据融合。
8、根据本发明的另一方面,提供了一种错时发波的多雷达数据融合装置,包括:
9、雷达数据获取模块,用于获取错时发波的至少两个毫米波雷达的发波时间和点云数据;
10、候选关键帧确定模块,用于根据各发波时间中最早发波时间和最晚发波时间确定当前发波周期,并从所述当前发波周期内的车辆数据帧中确定当前候选关键帧;
11、运动轨迹确定模块,用于根据所述当前候选关键帧和历史候选关键帧确定目标关键帧,并根据所述目标关键帧对应的车身数据和车辆运动模型确定从第一帧目标关键帧到所述最晚发波时间段内的车辆运动轨迹;
12、发波轨迹点确定模块,用于根据各毫米波雷达的发波时间确定各毫米波雷达在所述车辆运动轨迹上的发波轨迹点;
13、雷达数据融合模块,用于根据各毫米波雷达的发波轨迹点和转换关系,将各毫米波雷达的点云数据转换到最晚发波的毫米波雷达发波时的车辆坐标系下,并进行数据融合。
14、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
15、至少一个处理器;以及
16、与所述至少一个处理器通信连接的存储器;其中,
17、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的错时发波的多雷达数据融合方法。
18、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的错时发波的多雷达数据融合方法。
19、本发明实施例通过车身数据计算车辆运动轨迹,并根据毫米波雷达的发波时间,获取对应的发波迹点和轨迹点到车辆当前位置的转换关系,基于转换关系,将所有毫米波雷达的点云数据转换到相同时刻的车身坐标系下,有效降低了因毫米波雷达发波时间不同时,车辆运动导致的原始点云数据的偏差,提升了原始点云数据的准确性。
20、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种错时发波的多雷达数据融合方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述从所述当前发波周期内的车辆数据帧中确定当前候选关键帧包括;
3.根据权利要求2所述的方法,其特征在于,所述稳定性要求包括车身数据稳定且处于设定范围内,所述车身数据包括车辆速度和车辆横摆角速度。
4.根据权利要求2所述的方法,其特征在于,所述根据所述当前候选关键帧和历史候选关键帧确定目标关键帧包括:
5.根据权利要求4所述的方法,其特征在于,所述获取最早发波时间之前参考时间内的第一历史候选关键帧之后,还包括:
6.根据权利要求5所述的方法,其特征在于,所述所述当前发波周期内的车辆数据帧中确定当前候选关键帧之后,还包括:
7.根据权利要求1所述的方法,其特征在于,所述根据各毫米波雷达的发波时间确定各毫米波雷达在所述车辆运动轨迹上的发波轨迹点之后,还包括:
8.一种错时发波的多雷达数据融合装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的错时发波的多雷达数据融合方法。
技术总结
本发明公开一种错时发波的多雷达数据融合方法、装置、设备和介质。包括:根据各发波时间中最早发波时间和最晚发波时间确定当前发波周期,并从当前发波周期内的车辆数据帧中确定当前候选关键帧;根据当前候选关键帧和历史候选关键帧确定目标关键帧,并根据目标关键帧对应的车身数据对应的车身数据和车辆运动模型确定从第一帧目标关键帧到最晚发波时间段内的车辆运动轨迹;根据各毫米波雷达的发波时间确定各毫米波雷达在车辆运动轨迹上的发波轨迹点;根据各毫米波雷达的发波轨迹点和转换关系,将各毫米波雷达的点云数据转换到最晚发波的毫米波雷达发波时的车辆坐标系下,并进行数据融合。本发明可以提高原始点云数据的准确性。
技术研发人员:宋伟杰,王宇,林崇浩,张林灿
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!