一种RTK无人机POS伪固定数据空三加密粗差剔除方法与流程
本发明涉及摄影测量,更具体地说它是一种rtk无人机pos伪固定粗差数据降权处理方法。更具体地说它是一种rtk无人机pos伪固定数据空三加密粗差剔除方法。
背景技术:
1、rtk(real-time kinematic,实时动态,载波相位差分技术)无人机低空摄影测量技术在测绘领域已日趋成熟,拥有一套完整的作业流程。其作业过程为先确定摄影区域、规划飞行航线、设置重叠度、制定航高、相机设置、像控点布设、检查点测量、cors(continuously operating reference stations,利用多基站网络rtk技术建立的连续运行(卫星定位服务)参考站)网连接、野外航测作业,再将采集的数据进行空三加密处理,像控点刺点优化,生成产品。
2、上述过程中空三加密处理一般使用无人机rtk固定时采集的pos(position andorientation system,定位定姿系统,是imu/dgps组合的高精度位置与姿态测量系统)数据及对应的像片进行光束法带权值平差,但通过实践发现,rtk无人机作业经常性出现记录的部分像片pos固定解定位坐标数据与对应计算出的位置坐标数据不一致且差值较大,导致生成的正射影像及实景三维模型部分区域出现拉伸变形、错位分层及坐标精度差的问题,尤其是在受电离层干扰或通讯信号弱的地区,或者发生地质灾害需应急测绘的区域,问题十分突出,影响测绘产品精度及可靠性,增加了野外返工工作量,甚至返工依然不能解决问题,在应急抢险方面耽搁了最佳抢险时机。
3、因此,开发一种能解决rtk无人机作业出现的记录部分像片pos固定解定位坐标数据与对应计算出的位置坐标数据不一致且差值较大,导致生成的正射影像及实景三维模型部分区域出现拉伸变形、错位分层及坐标精度差的问题,且能提高检测功效的方法很有必要。
技术实现思路
1、本发明的目的是为了克服背景技术的不足之处,而提供一种rtk无人机pos伪固定数据空三加密粗差剔除方法,其主要原理为通过对pos伪固定解(伪固定解数据指的是在无人机作业时连接的cors网信号为rtk固定解状态下记录的错误数据,非内业处理软件解算值)粗差数据的降权处理,实现pos粗差数据的摄影中心空间坐标值以软件计算值替换并作为附加观测值进行平差,从而剔除以记录的pos伪固定解数据作为附加观测值,平差导致连接点匹配错误的空三加密粗差,提高空三加密精度。本发明仅通过内业处理便解决了pos数据伪固定解导致的正射影像、实景三维模型部分区域(pos伪固定粗差数据区域)拉伸变形、错位分层及坐标精度不达标的问题,具有测绘产品精度及可靠性高的特点,无需频繁野外返工作业,尤其是在受电离层异常干扰地区、通讯信号弱地区或地质灾害应急测绘区域,本发明提高测绘产品精度及可靠性的效果十分明显,具有技术可靠、操作便捷、提高工效、降低成本的特点。
2、为了实现上述目的,本发明的技术方案为:一种rtk无人机pos伪固定数据空三加密粗差剔除方法,其特征在于:包括如下步骤,
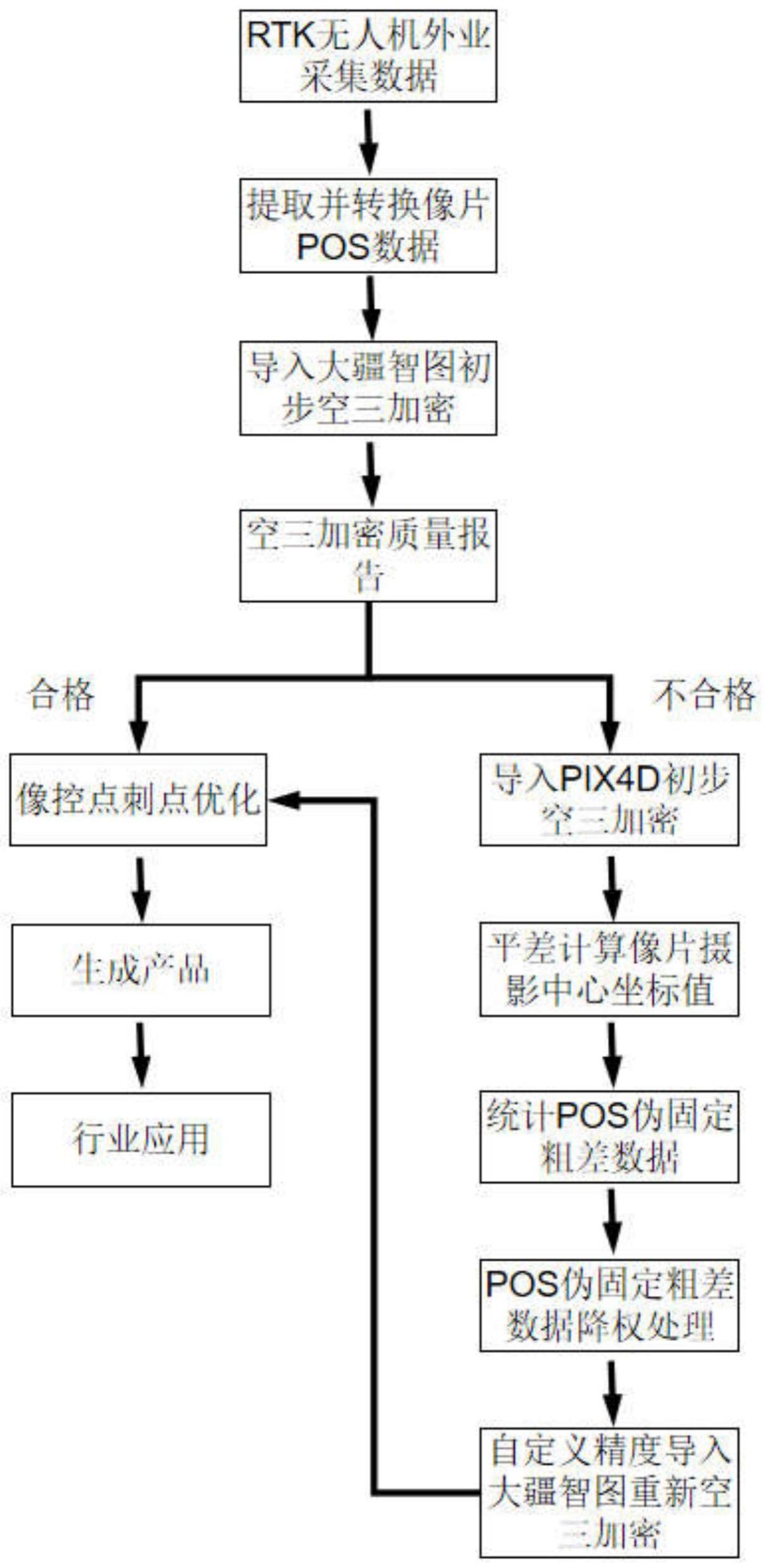
3、步骤一:rtk无人机作业采集的区块像片及对应的pos数据一并导入大疆智图软件进行初步空三加密处理,检查空三质量报告;
4、rtk无人机作业的航线规划可为二向或多向;
5、pos数据为rtk无人机连接cors网,接收相应基站信号时作业采集的定位定姿数据;
6、使用大疆智图软件只进行初步空三加密处理,无需进行刺点优化,获得空三质量报告;
7、解算后的空三质量报告里主要查看地理配准均方根误差及rtk固定解状态影像数量。
8、步骤二:将空三质量报告不合格的区块像片及对应的pos数据导入pix4d软件进行初步空三加密处理,平差计算出所有像片(即用于解算的某个区块拍摄的所有像片)摄影中心空间坐标值;步骤二中的空三加密处理用于计算所有像片摄影中心空间坐标值,并与摄影中心初始位置坐标(pos数据)进行对比,统计出粗差数据;
9、步骤三:对像片摄影中心初始位置坐标与计算位置坐标差值大的pos伪固定粗差数据进行统计;
10、步骤四:对统计出的pos伪固定粗差数据进行权值降低处理;本发明能识别pos伪固定解粗差数据,将伪固定解定义为无定位解权值,水平精度定义为2米,垂直精度定义为10米;其他非粗差pos数据权值保持不变,水平精度为0.03米,垂直精度为0.06米;
11、步骤五:使用大疆智图软件自定义精度导入降权处理后的pos数据及对应像片重新空三加密处理,像控点刺点优化,生成合格产品;步骤五中的空三加密处理是将重新定权(即降权处理)的pos粗差数据以自定义精度的方式进行空三加密处理,解决pos数据伪固定解导致的正射影像、实景三维模型部分区域拉伸变形、错位分层及坐标精度不达标的问题,无需频繁野外返工作业;
12、降权处理后的pos数据为包含粗差降权处理数据及非粗差数据一起的所有pos数据。
13、在上述技术方案中,在步骤二中,空三质量报告不合格数据为rtk无人机作业时记录的影像pos数据全为rtk固定解,且地理配准均方根误差大于2米。
14、在上述技术方案中,在步骤三中,pos伪固定粗差数据为电离层异常干扰或通讯信号弱rtk固定解状态精度持续降低导致的伪固定数据;pos伪固定粗差数据量应占总pos数据量的1/2以内;
15、pos伪固定粗差数据的统计方法具体为:
16、s31、像片摄影中心初始位置坐标为rtk无人机作业时记录的pos坐标数据,且一一对应;pos数据坐标系统为转换后的工程坐标系;pos坐标系统转换为将经纬度坐标转换为平面投影坐标、大地高转换为正常高,可用3个及以上同名控制点解算的布尔莎七参数进行转换;
17、s32、对像片摄影中心初始位置坐标与计算位置坐标x、y任一方向差值大于0.3米的pos伪固定粗差数据进行统计,统计出pos伪固定粗差数据。
18、在上述技术方案中,在步骤五中,产品为正射影像、实景三维模型;
19、合格产品为正射影像及实景三维模型无拉伸变形、错位分层,并且pos伪固定粗差数据区域图解点与实测点坐标差值对比精度统计达标。
20、在上述技术方案中,在步骤二、步骤五中,空三加密处理方法均为光束法带权值平差。
21、pix4d与大疆智图等统称为摄影测量内业处理软件。
22、本发明具有如下优点:
23、(1)能解决区块pos伪固定粗差数据区域拉伸变形、错位分层问题,并且图解点与实测点坐标差值对比精度统计达标,使数字线划图平面高程精度高,满足水利规范精度要求;本发明生成的正射影像及实景三维模型产品无形变、错位、分层,测绘产品精度及可靠性高,仅通过内业处理便解决了pos数据伪固定解导致的正射影像、实景三维模型部分区域拉伸变形、错位分层及坐标精度不达标的问题;
24、(2)仅通过pos伪固定粗差数据降权处理,就解决了空三加密连接点匹配错误的问题,无需人工耗费大量时间去剔除错误连接点;
25、(3)无需频繁野外返工作业,尤其是在受电离层异常干扰地区、通讯信号弱地区或地质灾害应急测绘区域,本发明提高测绘产品精度及可靠性的效果十分明显;
26、(4)技术可靠、操作便捷,能大幅提高工效,降低生产成本。
- 还没有人留言评论。精彩留言会获得点赞!