一种基于雷达的水位流速的测量方法及系统与流程
本发明属于水位流速测量,尤其涉及一种基于雷达的水位流速的测量方法及系统。
背景技术:
1、由于雷达的非接触式和高精度等特点,雷达经常会被用于测量水位和水流速度,雷达可以通过发射电磁波并接收反射回来的信号来确定距离和速度,当雷达的信号遇到水面时,一部分能量被反射回来,这些反射波可以被雷达接收器捕捉到并进行分析。
2、水位测量通常使用雷达高度计进行,雷达高度计通过测量雷达信号从水面反射回来所需的时间来确定水面的高度,而水流速度的测量通常是通过测量雷达信号反射回来的多次回波之间的时间差来实现。
3、目前利用雷达测量水位和水流速度的常规方法,通常会因一些外界的干扰因素导致测量结果不精确,例如,如果出现水面波动的情况,由于水面波动会使水面高度发生变化,从而使得信号的传播路径也发生变化,进而影响到测量结果,因此,当测量遇到大范围的水面波动的情况时,雷达也会受到反射波的干扰,从而导致测量误差增大,测量结果不准确。
技术实现思路
1、本发明提供一种基于雷达的水位流速的测量系统及装置及其充电系统,旨在解决水面波动情况下雷达的水位流速测量不准确的问题。
2、本发明是这样实现的,提供一种基于雷达的水位流速的测量方法,步骤包括:
3、在测量区域内按照布局安装多个雷达发射器和雷达接收器,步骤包括:
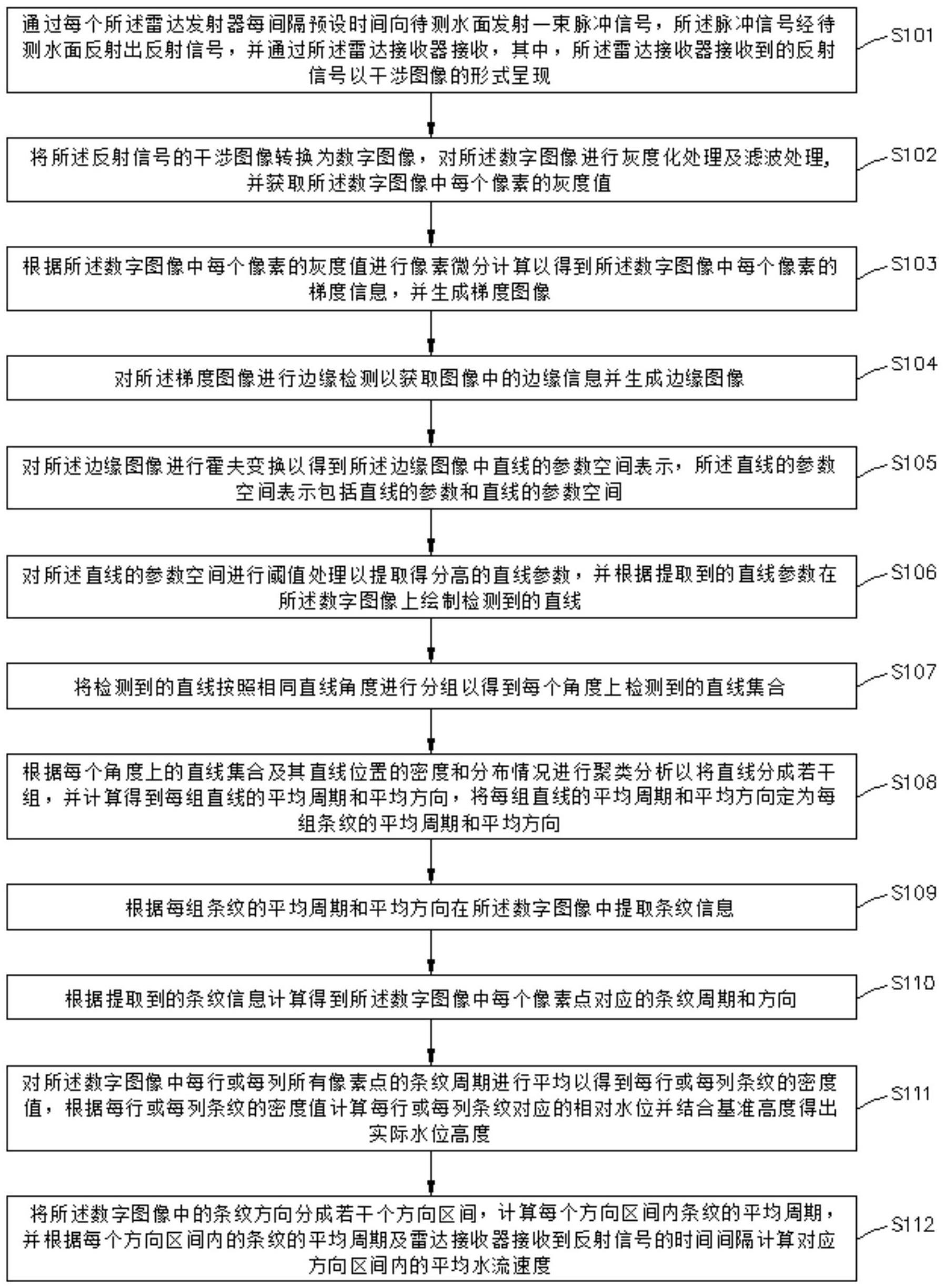
4、通过每个所述雷达发射器每间隔预设时间向待测水面发射一束脉冲信号,所述脉冲信号经过待测水面反射出反射信号,并通过所述雷达接收器接收,其中,所述雷达接收器接收到的反射信号以干涉图像的形式呈现;
5、将所述反射信号的干涉图像转换为数字图像,对所述数字图像进行灰度化处理及滤波处理,并获取所述数字图像中每个像素的灰度值;
6、根据所述数字图像中每个像素的灰度值进行像素微分计算以得到所述数字图像中每个像素的梯度信息,并生成梯度图像;
7、对所述梯度图像进行边缘检测以获取图像中的边缘信息并生成边缘图像;
8、对所述边缘图像进行霍夫变换以得到所述边缘图像中直线的参数空间表示,所述直线的参数空间表示包括直线的参数和直线的参数空间;
9、对所述直线的参数空间进行阈值处理以提取得分高的直线参数,并根据提取到的直线参数在所述数字图像上绘制检测到的直线;
10、将检测到的直线按照相同直线角度进行分组以得到每个角度上检测到的直线集合;
11、根据每个角度上的直线集合及其直线位置的密度和分布情况进行聚类分析以将直线分成若干组,并计算得到每组直线的平均周期和平均方向,将每组直线的平均周期和平均方向定为每组条纹的平均周期和平均方向;
12、根据每组条纹的平均周期和平均方向在所述数字图像中提取条纹信息;
13、根据提取到的条纹信息计算得到所述数字图像中每个像素点对应的条纹周期和方向;
14、对所述数字图像中每行或每列所有像素点的条纹周期进行平均以得到每行或每列条纹的密度值,根据每行或每列条纹的密度值计算每行或每列条纹对应的相对水位并结合基准高度得出实际水位高度;
15、将所述数字图像中的条纹方向分成若干个方向区间,计算每个方向区间内条纹的平均周期,并根据每个方向区间内的条纹的平均周期及雷达接收器接收到反射信号的时间间隔计算对应方向区间内的平均水流速度。
16、更进一步地,所述根据所述数字图像中每个像素的灰度值并通过像素微分算法计算所述数字图像中每个像素的梯度信息的步骤包括:
17、计算每个像素的x方向和y方向的梯度值,并根据每个像素的x方向和y方向的梯度值计算每个像素的梯度大小和梯度方向,计算公式如下:
18、gx=(i(x+1,y-1)+2i(x+1,y)+i(x+1,y+1))-(i(x-1,y-1)+2i(x-1,y)+i(x-1,y+1)),
19、gy=(i(x-1,y+1)+2i(x,y+1)+i(x+1,y+1))-(i(x-1,y-1)+2i(x,y-1)+i(x+1,y-1)),
20、
21、θ1=tan-1(gy,gx),
22、其中,gx和gy分别为像素在x方向和y方向的梯度值,g为像素的梯度大小,θ1为像素的梯度方向,i(x,y)为坐标在(x,y)的像素的灰度值。
23、更进一步地,所述对所述边缘图像进行霍夫变换以得到所述边缘图像中直线的参数空间表示的步骤中:
24、霍夫变换公式如下:
25、r=x*cosθ2+y*sinθ2,
26、其中,r为直线到坐标原点的垂直距离,θ2为直线与x轴的夹角,(r,θ2)为直线的极坐标,直线的参数包括直线到坐标原点的垂直距离和直线与x轴的夹角。
27、更进一步地,所述对所述直线的参数空间进行阈值处理以提取得分高的直线参数,并根据提取到的直线参数在所述数字图像上绘制检测到的直线的步骤包括:
28、对所述直线的参数空间中的计数器进行归一化以使计数器的取值范围在0到1之间;
29、将计数器值大于或等于预设阈值的直线参数提取出来,所述预设阈值的大小在0到1之间;
30、将提取出来的直线参数从所述直线的参数空间转换到所述数字图像中以绘制检测到的直线。
31、更进一步地,所述根据每个角度上的直线集合及其直线位置的密度和分布情况进行聚类分析以将直线分成若干组,并计算得到每组直线的平均周期和平均方向的步骤包括:
32、按照角度相近原则对所有直线进行分组以将角度相近的直线分为一组;
33、按照直线在所述数字图像中的位置对每组直线中的每条直线进行排序;
34、计算相邻两条直线之间的距离并定为所述相邻两条直线之间的周期长度,计算公式为:
35、
36、其中,di为第i条直线与第i+1条直线之间的距离,(xi,yi)为第i条直线的端点坐标;
37、对每组直线的所有相邻两条直线之间的周期角度求平均值以得到该组直线的平均周期;
38、对每组直线的所有直线的角度求平均值以得到该组直线的平均方向。
39、更进一步地,所述根据每组条纹的平均周期和平均方向在所述数字图像中提取条纹信息的步骤包括:
40、取目标组条纹,根据所述目标组条纹的平均方向设置一个第一预设窗口,其中,所述第一预设窗口的长度至少为所述目标组条纹的一个平均周期,所述第一预设窗口的宽度至少完整包含所述目标组条纹;
41、将所述第一预设窗口以所述目标组条纹的平均方向沿着所述目标组条纹移动,并提取每个位置的第一预设窗口内的像素值;
42、取目标位置,对所述目标位置的第一预设窗口内的每个像素值进行傅里叶变换以得到频率谱,频率谱计算公式为:
43、
44、其中,f(x,y)为所述目标位置的第一预设窗口内的像素值,m和n分别为所述第一预设窗口的宽度和高度,u和v为频率变量;
45、从所述频率谱中找到与所述目标组条纹的平均周期对应的频率成分,并获取对应的相位信息,所述相位信息θ3为:
46、θ3=∠f(u0,v0),
47、其中,(u0,v0)为筛选出的与所述目标组条纹的平均周期对应的频率相同的频率成分,∠f(u0,v0)为求(u0,v0)处复数的相位角;
48、根据所述相位信息对所述目标位置的第一预设窗口内的每个像素值进行相位调节以得到所述目标位置的第一预设窗口内相位调节后的像素值,其中,对每个像素值进行相位调节的公式为:
49、
50、其中,f,(x,y)为相位调节后的像素值,f(x,y)为相位调节前的像素值,(x,y)为像素点,θ3为相位信息;
51、获取每个位置的第一预设窗口内的相位调节后的像素值并汇合得到所述目标组条纹的亮度信息,所述目标组条纹的亮度信息包括每个位置的第一预设窗口内的相位调节后的像素值。
52、更进一步地,所述根据提取到的条纹信息计算得到所述数字图像中每个像素点对应的条纹周期和方向的步骤包括:
53、根据提取到的条纹的亮度信息对条纹的每个像素点(x,y)的梯度值进行计算以得到条纹的每个像素点的梯度向量;
54、根据条纹的每个像素点的梯度向量计算条纹的每个像素点的梯度幅值和梯度方向,梯度幅值即为条纹亮度变化的大小,梯度方向即为条纹亮度变化的方向;
55、对每个像素点设置一个以相应像素点为中心的第二预设窗口,对所述第二预设窗口内的梯度方向进行直方图统计,并将与直方图峰值对应的方向作为相应像素点的条纹方向;
56、对所述第二预设窗口内的相素值进行傅里叶变换以得到频率谱,从频率谱中找到与相应像素点对应的条纹周期对应的频率成分,并根据频率成分计算相应像素点对应的条纹周期。
57、更进一步地,所述根据每行或每列条纹的密度值计算每行或每列条纹对应的相对水位并结合基准高度得出实际水位高度的步骤包括:
58、对每行或每列条纹的密度值进行归一化处理以得到每行或每列条纹的相对密度,归一化处理公式为:
59、
60、其中,d(x)为归一化处理后条纹的相对密度值,x为条纹的密度值,min(x)为每行或每列所有条纹的最小密度值,max(x)为每行或每列所有条纹的最大密度值;
61、对每行或每列条纹的相对密度按从小到大进行排序以得到排名;即第一个值的排名为1,第二个值的排名为2。
62、对排名进行归一化处理以得到每行或每列条纹在数字图像中的相对水位,计算公式为:
63、相对水位=(排名-1)/(n-1),其中,n为每行或每列条纹的数量。这个公式是将排名映射到0到1的范围内,相对水位为0表示该行或该列最密集的条纹,相对水位为1表示该行或该列最稀疏的条纹;
64、将每行或每列的相对水位拼接起来以得到所述数字图像的相对水位分布情况;
65、调取基准高度,并根据相对水位与基准高度相加或相减以得到实际水位,其中,基准高度为水域中预先设置的一个已知高度的测量点的高度。
66、更进一步地,所述将所述数字图像中的条纹方向分成若干个方向区间,计算每个方向区间内条纹的平均周期,并根据每个方向区间内的条纹的平均周期及雷达接收器接收到反射信号的时间间隔计算对应方向区间内的平均水流速度的步骤包括:
67、将水平方向定为参考方向,将除水平方向以外的方向等间隔划分成若干个方向区间;
68、对每个方向区间内所有像素的条纹周期取平均值以得到对应区间内条纹的平均周期;
69、并根据每个方向区间内条纹的平均周期及雷达接收器接收到反射信号的时间间隔计算对应方向区间内的平均水流速度,计算公式为:
70、
71、其中,t为雷达接收器接收到反射信号的时间间隔,ti为第i个方向区间的平均周期,(θi,θi+1)为第i个方向区间的方向范围。
72、本发明还提供一种基于雷达的水位流速的测量系统,用于执行权利要求1所述的基于雷达的水位流速的测量方法,在测量区域内按照布局安装多个雷达发射器和雷达接收器,包括:
73、信号发射接收模块:用于通过每个所述雷达发射器每间隔预设时间向待测水面发射一束脉冲信号,所述脉冲信号经过待测水面反射出反射信号,并通过所述雷达接收器接收,其中,所述雷达接收器接收到的反射信号以干涉图像的形式呈现;
74、图像处理模块:用于将所述反射信号的干涉图像转换为数字图像,对所述数字图像进行灰度化处理及滤波处理,并获取所述数字图像中每个像素的灰度值;
75、梯度图像生成模块:用于根据所述数字图像中每个像素的灰度值进行像素微分计算以得到所述数字图像中每个像素的梯度信息,并生成梯度图像;
76、边缘图像生成模块:用于对所述梯度图像进行边缘检测以获取图像中的边缘信息并生成边缘图像;
77、霍夫变换模块:用于对所述边缘图像进行霍夫变换以得到所述边缘图像中直线的参数空间表示,所述直线的参数空间表示包括直线的参数和直线的参数空间;
78、直线检测模块:用于对所述直线的参数空间进行阈值处理以提取得分高的直线参数,并根据提取到的直线参数在所述数字图像上绘制检测到的直线;
79、直线分组模块:用于将检测到的直线按照相同直线角度进行分组以得到每个角度上检测到的直线集合;
80、第一计算模块:用于根据每个角度上的直线集合及其直线位置的密度和分布情况进行聚类分析以将直线分成若干组,并计算得到每组直线的平均周期和平均方向,将每组直线的平均周期和平均方向定为每组条纹的平均周期和平均方向;
81、提取模块:用于根据每组条纹的平均周期和平均方向在所述数字图像中提取条纹信息;
82、第二计算模块:用于根据提取到的条纹信息计算得到所述数字图像中每个像素点对应的条纹周期和方向;
83、水位高度计算模块:用于对所述数字图像中每行或每列所有像素点的条纹周期进行平均以得到每行或每列条纹的密度值,根据每行或每列条纹的密度值计算每行或每列条纹对应的相对水位并结合基准高度得出实际水位高度;
84、水流速度计算模块:用于将所述数字图像中的条纹方向分成若干个方向区间,计算每个方向区间内条纹的平均周期,并根据每个方向区间内的条纹的平均周期及雷达接收器接收到反射信号的时间间隔计算对应方向区间内的平均水流速度。
85、本发明的有益效果在于,与现有技术相比,本发明的基于雷达的水位流速的测量方法,采用全息干涉测量,具有更高的精度和准确性,能够有效地避免大范围的水面波动对测量结果的影响,从而保证了水位及水流速度测量的准确性和可靠性,同时,该测量方法还具有实时性,能够得出准确可靠的实时测量结果,便于对水位和水流速度实施实时监测。
86、其中,首先通过对一系列算法的结合使用从图像中提取出条纹信息,提取出的条纹信息能够反映出水面的波动情况,为后续的水位计算提供了基础,其次通过计算每个像素点周围条纹的方向从而确定每行或每列条纹的方向,为后续的方向区间划分和周期计算提供了依据,然后将每行或每列条纹的方向划分成若干个方向区间,以用于后续的条纹密度计算和水位计算,再对每个方向区间内条纹的密度值进行计算,以得到单位长度内的条纹数量,用于反应水面的高低波动情况,最后根据每行或每列条纹的密度值计算每行或每列条纹对应的相对水位并结合基准高度得出实际水位高度,及根据每个方向区间内的条纹的平均周期及雷达接收器接收到反射信号的时间间隔计算得到对应方向区间内的平均水流速度。
- 还没有人留言评论。精彩留言会获得点赞!