自动驾驶换道场景的路径规划方法、装置、设备及介质与流程
本发明实施例涉及自动驾驶,尤其涉及一种自动驾驶换道场景的路径规划方法、装置、设备及介质。
背景技术:
1、自动驾驶是一个具有极高复杂度的系统工程,而决策规划是自动驾驶的关键部分之一,其核心就是要解决车辆该怎么走的问题。
2、换道决策规划是指车辆为获取速度优势或由于行驶需求等,综合考虑自身及周围车辆位置、速度和加速度等因素,在给定的未来时间段内计算时空行驶轨迹,以保证变更车道行为的顺利安全地进行。目前当场景发生变化时(如车道跟随变为换道),规划线型会随之改变。当规划线型变化时,跟踪控制误差突变,导致方向盘猛打。
3、换道时方向盘猛打可分为两种情景:
4、1、换道决策执行时,优化出的线型横向变化较大,导致换道较猛,引起乘客体感不适。
5、2、换道由于某种因素被中止时,返回原车道,实车体感为方向盘猛打,引起乘客体感不适。
技术实现思路
1、本发明实施例提供一种自动驾驶换道场景的路径规划方法、装置、设备及介质,通过结合当前道路信息和障碍物信息,根据障碍物信息决策出最优的换道时机,降低换道反复情况的发生。
2、第一方面,本发明实施例提供了一种自动驾驶换道场景的路径规划方法,该方法包括:
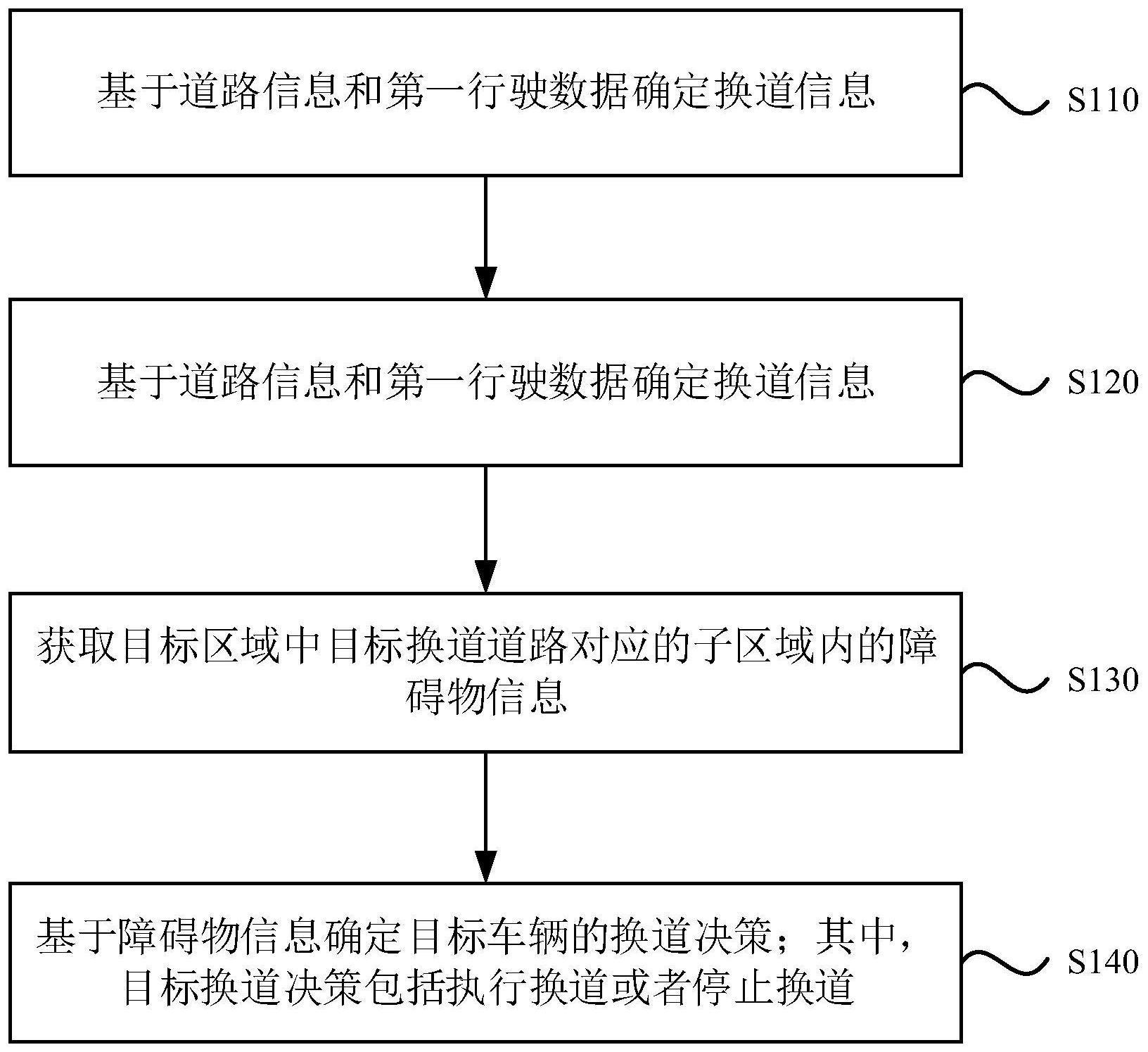
3、获取当前车辆的行驶数据及其对应的目标区域内的道路信息和障碍物信息;
4、根据所述行驶数据、所述道路信息和所述障碍物信息确定当前车辆的换道决策及所述换道决策对应的路径边界;其中所述换道决策包括换道保持、换道中止保持和返回原车道;
5、基于所述路径边界确定路径参考横向信息;
6、确定所述路径参考横向位置构建路径二次规划模型;
7、对所述路径二次规划模型进行求解,获得最优路径轨迹。
8、第二方面,本发明实施例还提供了一种自动驾驶换道场景的路径规划装置,该装置包括:
9、获取模块,用于获取当前车辆的行驶数据及其对应的目标区域内的道路信息和障碍物信息;
10、换道决策确定模块,用于根据所述行驶数据、所述道路信息和所述障碍物信息确定当前车辆的换道决策及所述换道决策对应的路径边界;其中所述换道决策包括换道保持、换道中止保持和返回原车道;
11、信息确定模块,用于基于所述路径边界确定路径参考横向信息;
12、模型确定模块,用于确定所述路径参考横向位置构建路径二次规划模型;
13、路径轨迹确定模块,用于对所述路径二次规划模型进行求解,获得最优路径轨迹。
14、第三方面,本公开实施例还提供电子设备,所述电子设备,包括:
15、一个或多个处理器;
16、存储装置,用于存储一个或多个程序,
17、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现本公开实施例提供的自动驾驶换道场景的路径规划方法。
18、第四方面,本公开实施例还提供了包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行实现本公开实施例提供的自动驾驶换道场景的路径规划方法。
19、本发明公开了一种自动驾驶换道场景的路径规划方法、装置、设备及介质,该方法包括:获取当前车辆的行驶数据及其对应的目标区域内的道路信息和障碍物信息;根据所述行驶数据、所述道路信息和所述障碍物信息确定当前车辆的换道决策及所述换道决策对应的路径边界;其中所述换道决策包括换道保持、换道中止保持和返回原车道;基于所述路径边界确定路径参考横向信息;确定所述路径参考横向位置构建路径二次规划模型;对所述路径二次规划模型进行求解,获得最优路径轨迹。利用该方法,通过对模型进行优化,使得优化出的线型更加平滑,降低了横向速度变化率,提升换道体感。
技术特征:
1.一种自动驾驶换道场景的路径规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,根据所述行驶数据、所述道路信息和所述障碍物信息确定当前车辆的换道决策及所述换道决策对应的路径边界,包括:
3.根据权利要求2所述的方法,其特征在于,根据所述障碍物信息确定目标车辆的换道决策,包括:
4.根据权利要求2所述的方法,其特征在于,根据所述换道决策确定对应的路径边界,包括:
5.根据权利要求4所述的方法,其特征在于,基于所述路径边界确定路径参考横向信息,包括:
6.根据权利要求1所述的方法,其特征在于,确定所述路径参考横向位置构建路径二次规划模型,包括:
7.根据权利要求6所述的方法,其特征在于,基于所述换道决策和所述路径参考横向确定模型权重,包括:
8.根据权利要求6所述的方法,其特征在于,基于所述换道决策和所述路径参考横向确定模型权重,包括:
9.一种自动驾驶换道场景的路径规划装置,其特征在于,包括:
10.一种电子设备,其特征在于,所述电子设备包括:
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-8中任一项所述的自动驾驶换道场景的路径规划方法。
技术总结
本发明公开了一种自动驾驶换道场景的路径规划方法、装置、设备及介质,该方法包括:获取当前车辆的行驶数据及其对应的目标区域内的道路信息和障碍物信息;根据所述行驶数据、所述道路信息和所述障碍物信息确定当前车辆的换道决策及所述换道决策对应的路径边界;其中所述换道决策包括换道保持、换道中止保持和返回原车道;基于所述路径边界确定路径参考横向信息;确定所述路径参考横向位置构建路径二次规划模型;对所述路径二次规划模型进行求解,获得最优路径轨迹。利用该方法,通过对模型进行优化,使得优化出的线型更加平滑,降低了横向速度变化率,提升换道体感。
技术研发人员:张中举,刘洋,邹炳宇,尚秉旭,陈志新,王洪峰,张勇,金百鑫,邱云海,陈威池
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!