基于大量程自准直仪的MEMS陀螺仪安装误差校准方法
本发明属于光学测量仪器领域,具体是提出用两台正交结构的大量程自准直仪与mems陀螺仪,同步输出三轴姿态感知读值,从而实现对陀螺仪的安装误差校准的方法。
背景技术:
1、mems(micro electro mechanical systems,微电子机械系统)陀螺仪作为小型化、低成本、高频响应的角速率传感器件具有可穿戴、易集成的重要特性,正从信标跟踪单一应用方向迅速发展成为机械控制、人员导航、物料定位等多个领域的重要传感器件。当使用mems陀螺仪对目标三维运动感知测量时,需要严格控制其正交度,使其测量轴与惯性测量单元(inertial measurement unit,imu)坐标系xyz对应重合,从而避免测量值的线性误判。目前,主要使用精密三轴角速率输出转台作为标定基准,测得mems陀螺仪输出的误判读值,从而完成安装误差的校准。然而,精密三轴转台由于缺乏可溯源基准,其装配和操作规范极高,且高频率检调周期和严苛配置条件更让众多实验室难以承受。
2、迄今为止,世界上多个惯性传感和精密测量实验室已开展光学可溯源测量技术应用在转台角度读值标定和陀螺仪误差校准中的研究工作,sachinnadig(文献s.nadig,s.b.clark,and a.lal,“dome-disc:diffractive optics metrology enableddithering inertial sensor calibration,”in proc.ieee 27th int.conf.on microelectro mechanical systems(mems),san francisco,ca,usa,2014,pp.608-611.)设计了一种使用纳米光学标尺成像系统(noris)测量抖动台上陀螺仪的比例因子和偏差的方法,但是该方案校准精度受成像系统像素和系统集成度的影响,在实验细节上还需改进;h.schwenke(文献h.schwenke,r.schmitt,p.jatzkowski,c.warmann,“on-the-flycalibration of linear and rotary axes of machine tools and cmms using atracking interferometer,”cirpannals,vol.58,no.1,pp.477-480,2009.)将激光跟踪用于旋转机床轴的六自由度校准,尽管激光跟踪对机床静态和不同速度下的运动测量具有一定的可靠性,但速度越高,连续测量差异越大;jiapeng mou(文献j.mou,j.su,l.miao,andt.huang,“research on field application technology of dynamic anglemeasurement based on fiber optic gyroscope and autocollimator,”ieee sensorsjournal,vol.21,no.13,pp.15308-15317,july 1,2021.)利用光学自准直仪在±0.05°范围内进行光纤陀螺仪(fog)的比例因子标校;其中,由于光学自准直测角仪具有结构易集成、测角精度高的理论优势,在此类研究中获得了更多的重视。但是其受限于口径尺寸,导致测角范围较小,难以用于mems陀螺仪具有大动态范围下的误差校源工作。
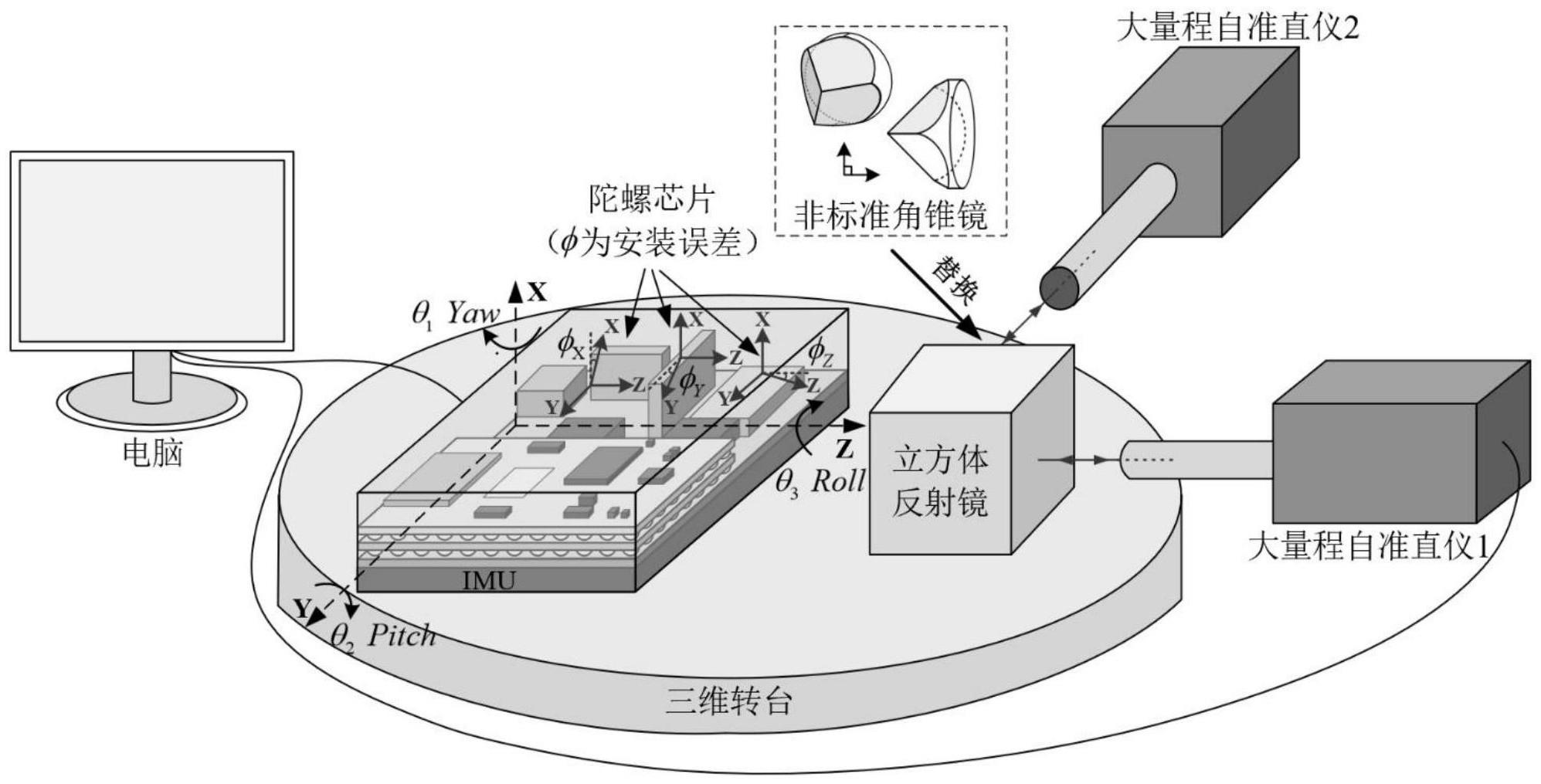
3、在本文中,公布了一种基于大量程自准直仪校准mems陀螺仪安装误差的方法。利用自准直仪可溯源的特征,同时突破自准直仪测量范围不足的限制,设计了±9°测量范围的自准直仪,再用两台大量程自准直仪空间正交结构搭建mems陀螺仪的数据评估基准,在计算机同步采集时间串口的控制下,完成mems陀螺仪安装误差的校准测量。
技术实现思路
1、本发明旨在解决以上现有技术的问题。提出了一种基于大量程自准直仪的mems陀螺仪安装误差校准方法。本发明的技术方案如下:
2、一种基于大量程自准直仪的mems陀螺仪安装误差校准方法,其包括以下步骤:
3、步骤1、利用非标准角锥镜hcccr的反射角灵敏度调制机理,设计了±9°测角范围的自准直仪;
4、步骤2、通过利用两台大量程自准直仪间的正交组合,搭建三轴mems陀螺仪测量数据的评估基准;
5、步骤3、搭建自准直仪相机与imu上位机间的共同数据采集串口,通过mems陀螺仪角速率测量读值与时间的积分,实现自准直仪和mems陀螺仪输出读值间的量纲统一和采集时间同步;
6、步骤4、通过传统精密角速率输出转台标定mems陀螺仪安装误差系数,做对比试验,验证该方法的可靠性。
7、进一步的,所述步骤1、利用非标准角锥镜hcccr的反射角灵敏度调制机理,设计了±9°测角范围的自准直仪,具体包括:
8、通过旋转标准角锥镜镜面,设计了两块非标准角锥镜,其镜面夹角分别为∠2_3=90°13',∠3_1=89°47',∠1_2=90°13',利用非标准角锥镜替换平面反射镜作为反射体结构,得到大量程自准直仪测量系统;当非标准角锥镜随被测物体产生转动时,大量程自准直仪通过读取psd的输出电压,实现光斑在psd平面的位移转化,根据和完成非标准角锥镜的姿态角度测量。
9、进一步的,所述步骤1非标准角锥镜三个反射面的法向量根据标准角锥镜旋转后的镜面夹角关系推导表示为:
10、
11、其中-δ12是镜面1沿oz轴旋转的角度,δ23是镜面2沿ox轴旋转的角度,δ13是镜面1沿oy轴旋转的角度;根据上述非标准角锥镜的获得过程,可推导若δ1=δ,δ2=δ,δ3=-δ,其中δ为非标准角锥镜三个反射面夹角的数学联系角度,则测量光束经3-2-1反射面反射后的矢量变化为:
12、
13、因此,非标准角锥镜的反射角灵敏度为:
14、
15、根据公式(3)可知,通过设定联系角度δ数值,实现非标准角锥镜反射角灵敏度的调节;设计了两块数学联系角度δ=13',镜面夹角分别为∠2_3=90°13',∠3_1=89°47',∠1_2=90°13'的非标准角锥镜。
16、按照传统自准直仪利用平面镜作为反射体,当平面镜随被测物体产生偏航θ1和俯仰θ2角度转动时,准直光束将发生倾斜,在psd探测器上呈现光斑位移变化,该过程的数学描述为:
17、δx=f·2·tan(θ1) (4)
18、δy=f·2·tan(θ2) (5)
19、其中f为准直镜焦距,δx为光斑沿x0轴的位移,δy为光斑沿y0轴的位移;若将非标准角锥镜替换掉平面反射镜,则公式(4)、(5)应改写为:
20、
21、
22、用配备索尼mi-20cmos传感器的nikon-6d自准直仪进行测量,其测量范围可以从±30'增大至±9°,系统分辨率小于4″。
23、进一步的,所述步骤2、通过利用两台大量程自准直仪间的正交组合,搭建三轴mems陀螺仪测量数据的评估基准,具体包括:
24、由于自准直仪只对偏航θ1和俯仰θ2角度敏感,对滚转角度θ3不敏感,为了获得三轴运动角度感知,利用高精度正方体反射模块的两个相邻镀膜面,标定两台自准直仪,使其分别瞄准反射模块坐标轴,调整为相互正交的状态;用非标准角锥镜替换正方体反射模块,通过还原自准直仪探测面上的光斑状态,完成两台自准直仪与非标准角锥镜的对准,使得转台沿偏航x轴转动θ1和俯仰y轴转动θ2角度时,自准直仪1为陀螺仪的校准基准;转台沿横滚z轴转动θ3角度时,自准直仪2为校准基准。
25、进一步的,所述步骤2三轴转台每一轴向的旋转角度分别通过自准直仪和三轴mems陀螺仪同时获得读数;为了获得高精度的三维运动角度感知,使用了两台大量程自准直仪正交组合设计,完成imu三轴姿态的基准角度测量;
26、利用高精度正方体反射模块的两个相邻镀膜面,对准两台自准直仪,通过观察两台自准直仪的十字光斑分别位于传感器的中心位置,将两台自准直仪调整为相互正交,其次通过微调正方块和两台自准直仪的空间姿态角度,直至转台沿着z轴转动过程中,自准直仪1的光斑始终保持静止,且同时保证自准直仪2的光斑只沿探测平面水平移动为止,该步骤能够保证自准直仪1和2的探测面分别与正方体的xoy和xoz坐标平面重合;最后用非标准角锥镜替换正方体反射模块,基于孔径面的平面反射原理,观察自准直仪探测面上的光斑状态,完成自准直仪与非标准角锥镜发射体的对准。
27、进一步的,所述步骤3、搭建自准直仪相机与imu上位机间的共同数据采集串口,通过mems陀螺仪角速率测量读值与时间的积分,实现自准直仪和mems陀螺仪输出读值间的量纲统一和采集时间同步,具体包括:
28、利用两台自准直仪对非标准角锥镜姿态角度测量读值对比较准imu中三轴陀螺仪的姿态角度感知读值;在两类系统读值对比中,由计算机给予对应测量任务的自准直仪psd和imu的共同串口执行采集指令,从而形成两套系统间的采集时间同步;以psd的曝光时间为一次imu的采集数据对比时间,通过θi=[(ωi+ωi+1)]*[(ti+1-ti)]/2可以得到mems陀螺仪测量的角度,实现了自准直仪和mems陀螺仪输出读值间的量纲统一。
29、进一步的,所述步骤3mems陀螺仪安装误差校准系统,由两个相互正交的大量程自准直仪和手动三轴转台构成;通过三轴转台依次沿其标轴转动时,给与imu和非标准角锥镜对应偏航θ1、俯仰θ2或横滚θ3旋转角度;在转台开始转动时,计算机给予自准直仪psd和imu共同串口执行采集指令,使其同时测量读值,其中,转台沿偏航x轴θ1和y轴俯仰θ2角度转动时,自准直仪1为陀螺仪读值的校准基准,转台沿z轴横滚θ3角度转动时自准直仪2为读值基准;
30、转台在±9°范围内进行测量,以psd的曝光时间为一次imu的采集数据对比时间,由于在psd曝光时间内,mems陀螺仪等频采集了n次数据,因此,陀螺仪测量的角度为:
31、
32、其中ωi是psd一次曝光时间内三轴mems陀螺仪的采集角速率,i=1、2、3…n,t是陀螺仪的采样间隔时间;θi是对应自准直仪一次曝光时间内mems陀螺仪测量的角度;通过对比两台自准直仪对非标准角锥镜姿态角度测量读值和imu中三轴陀螺仪的姿态角度感知读值,对mems陀螺仪安装误差进行校准。
33、进一步的,所述步骤4、通过传统精密角速率输出转台标定mems陀螺仪安装误差系数,具体包括:
34、将装有三轴mems陀螺仪的imu上位机和非标准角锥镜刚性固定在pt5型三轴手动转台上,使三维转台分别沿其坐标轴在±9°范围内旋转,将每一psd曝光间隔内的三轴mems陀螺仪与大量程自准直仪的测量值做线性拟合并均值处理,记录三轴mems陀螺仪的安装误差系数为kij(i=x,y,z,j=x,y,z);然后,利用传统精密角速率输出转台标定mems陀螺仪安装误差系数的方法验证本发明的可靠性;最后,将两种方法所标定的安装误差系数分别用于实验结果的数据补偿。
35、进一步的,所述步骤4将pt5型三维手动转台分别沿偏航θ1、俯仰θ2和横滚θ3角度在±9°范围内转动,使得三轴mems陀螺仪获得大量程自准直仪每次测量读值下所测量的旋转角度,将每一psd曝光间隔内的三轴mems陀螺仪与大量程自准直仪的测量值做比并均值处理后即测量读值之比的线性斜率,可求得三轴mems陀螺的安装误差系数kij(i=x,y,z,j=x,y,z)。
36、通过使用精密三轴角速率输出转台i6082型(测量范围0.001°/s~300°/s,测量精度优于0.05%),在±100°/s范围内,以每20°/s的步长变化,测量mems陀螺仪三轴安装误差,并记录安装误差系数为k'ij(i=x,y,z,j=x,y,z);将两种方法所标定的安装误差系数分别用于实验结果的数据补偿,其补偿方法表示为:
37、
38、其表示载体有角速率输入时,mems陀螺仪的输出矩阵,ωx0、ωy0、ωz0为陀螺仪静止时的零位输出,其值很小可忽略不计;由实验得出,经两种标定方法补偿后的imu输出的相对偏差低于0.3%。
39、本发明的优点及有益效果如下:
40、本发明提出了一种基于大量程自准直仪的mems陀螺仪安装误差校准方法,通过设计数学联系角度δ为13'的非标准角锥镜,将nikon-6d自准直仪的测角范围从±30'增大至±9°。利用两台正交状态的大量程自准直仪测量系统,实现对待校准imu的偏航、俯仰、横滚三轴角度旋转过程的姿态表征。最后,利用计算机向自准直仪和imu上位机发送串口信号,实现同步数据采集。并通过mems陀螺仪角速率测量读值与时间的积分,实现了大量程自准直仪和mems陀螺仪输出读值间的量纲统一和采集时间同步,实验表明该方法与传统精密三轴转台标定方法相比,mems陀螺仪安装误差的校准精度偏差优于0.3%。
41、在此之前,mems陀螺仪安装误差的校准主要还是以精密三轴角速率输出转台为标定基准,然而,精密三轴转台由于缺乏可溯源基准,其装配和操作规范对实验人员提出了极高要求,且高频率检调周期和严苛配置条件更让众多实验室难以承受。基于以往工作者的研究,陀螺仪的一系列误差源虽然可以通过激光干涉仪、纳米光学标尺成像等光学可溯源技术进行标定,但该技术普遍受限于光学口径尺寸,导致测角范围很小,故难以用于mems陀螺仪具有大动态范围下误差体现特性的安装误差标定工作。而本方法突破了自准直仪测量范围不足的限制,有助于促进惯性传感校准技术向可溯源方向发展,从而明显降低和简化实验室设备成本和维护要求。
- 还没有人留言评论。精彩留言会获得点赞!