鱼类统计方法及装置与流程
本发明涉及渔业,尤其涉及一种鱼类统计方法及装置。
背景技术:
1、目前在渔业生产和渔业资源监测领域,准确估计鱼类数量是渔业养殖中的重要课题,准确的掌握鱼的数量、削减饲养成本并进行有计划的生产,是养殖规范化、科学化管理的技术保障。现代化渔业养殖对自动化鱼类统计装置的需求不断提高,人们对鱼类统计的自动化程度、准确率、速度都有了很高的要求。
2、声纳是一种利用声波在水中的传播特性,通过电声转换和信息处理,完成水下探测器和通讯任务的电子设备。它有主动和被动两种类型,属于声学定位的范畴。声纳是利用水中声波对水下目标进行探测、定位和通讯的电子设备,是水声学中应用最广泛、最重要的一种装置。由于电磁波在水中衰减的速率非常高,无法作为侦测的讯号来源,以声波探测水下物体成为运用最广泛的手段。在水中进行观测和测量,具有得天独厚的条件的只有声波。在水中进行测量和观测,至今还没有发现比声波更有效的手段。
3、现有技术中,使用水下摄像头对水质的要求较高,无法实现远距离探测,且在浑浊的水中难以清楚的监测鱼群活动,以及鱼一般具有趋光性或避光性,影响鱼群的真实情况;同时,现有声纳技术多是以“鱼群”为目标,进行探测分析,而不是以单体为目标进行探测分析,误差较大的问题。针对上述出现的问题,目前尚未提出有效的解决方案。
技术实现思路
1、发明目的:提供一种鱼类统计方法及装置,以解决现有技术存在的上述问题。
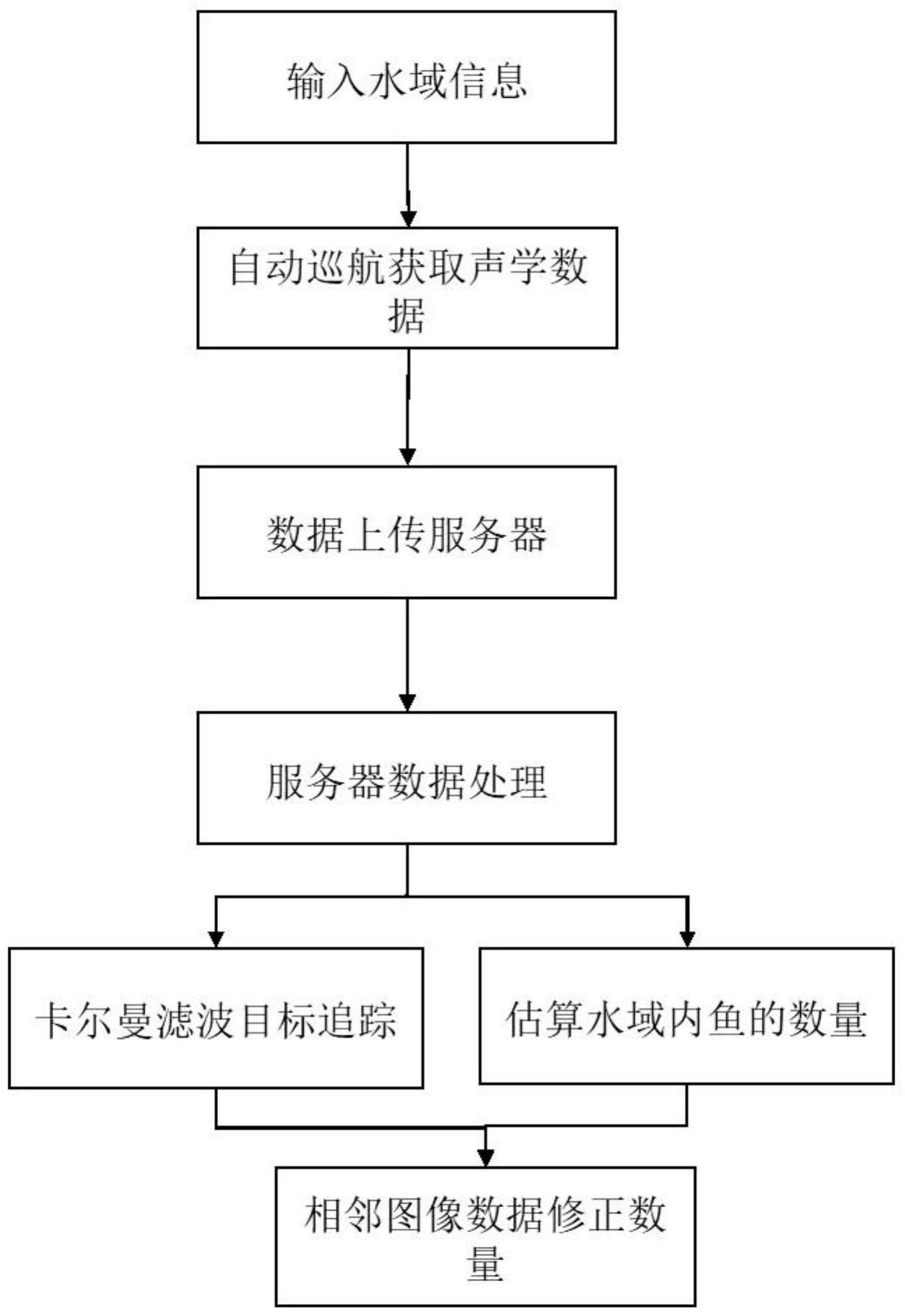
2、技术方案:鱼类统计方法,包括以下步骤:
3、s1、获取预设水域范围内的鱼类数据;其中,所述鱼类数据包括:声学数据和图像数据;
4、s2、对所述鱼类数据进行预处理;
5、s3、通过目标检测算法识别图像中的鱼体目标并进行统计,再通过卡尔曼滤波算法对个体目标进行目标关联和跟踪;
6、s4、结合图像位置信息、图像时间信息以及鱼体目标关联和跟踪的预测结果对统计结果进行修正,以求和统计出水域内总的鱼量。
7、作为优选,获取预设水域范围内的鱼类数据之前还包括:
8、通过检测设备自动巡游并实时获取巡游时的声学数据,同时将数据通过无线通讯装置发送至云端服务器。
9、作为优选,通过检测设备自动巡游并实时获取巡游时的声学数据和图像数据,同时将数据通过无线通讯装置发送至云端服务器之前还包括:
10、将检测设备放置在检测水域,通过检测设备的温度传感器检测水温,gps定位当前位置,通过无线通讯装置与云端服务器连接,在服务器端设置检测水域的边界范围,服务器根据水域边界和水体温度规划设备巡游路径。
11、作为优选,通过目标检测算法识别图像中的鱼体目标并进行统计,再通过卡尔曼滤波算法对个体目标进行目标关联和跟踪包括:
12、对原始声图使用线性插值预处理得到处理后的声学图像(p1,p1,…pn),n为图像总数,接着对图像进行线性拉伸,将拉伸后的图像中的背景去除,留下图像中的有效目标,即水中的鱼个体目标,统计图像中个体数量定义个体目标为:
13、其中x,y为个体在声纳图像中的坐标,l为个体长度,l/w为个体长宽比值
14、第i个有效目标在k时刻的系统状态向量为fk(i),计算第i个有效目标在前一时刻状态量fk-1(i)的预测值其中i=1,2…nk-1,其中nk-1是k-1时刻的状态个数,预测方程为:
15、
16、其中a为状态转移矩阵,δt是采样时间间隔。
17、作为优选,通过目标检测算法识别图像中的鱼体目标并进行统计,再通过卡尔曼滤波算法对个体目标进行目标关联和跟踪还包括:
18、根据状态转换矩阵由前一状态值预测当前的状态值,同时预测状态协方差矩阵:
19、p-k+1=a*p-k+1*at+q
20、根据声学图像的测量值更新系统最优估计以及卡尔曼增益kk和状态协方差pk:
21、pk=(1-kh)p-k
22、kk=p-kht(hp-kht+r)-1
23、
24、式中,p-k表示状态的先验证协方差矩阵,a表示状态转移矩阵,q表示状态协方差矩阵,h表示观测矩阵,r表示噪声协方差矩阵,zk表示观测值。
25、作为优选,结合图像位置信息、图像时间信息以及鱼体目标关联和跟踪的预测结果对统计结果进行修正,以求和统计出水域内总的鱼量包括:
26、通过gps确定图像的采集时间和相对位置,图像下一时刻相邻的图像时间间隔δt,使用两位置相邻两图像采样时间的间隔δt,预测个体目标最优估计获得个体(x,y)坐标,确定目标坐标在采样时间间隔δt内是否移出当前图像,并确目标移入图像的编号,修正所有帧图像后,求和统计出水域总的鱼数量。
27、作为优选,对所述鱼类数据进行预处理包括:
28、对声学数据通过存储格式转换,将图像构建成为矩形声图并预处理。
29、为了实现上述目的,根据本技术的另一方面,提供了一种鱼类统计装置。
30、根据本技术的鱼类统计装置,包括:船状主体,所述船状主体的底部设置有发射声换能器、接收换能器、温度传感器和成像控制器,所述船状主体的尾部设置有驱动装置,所述船状主体的顶部分别设置有超声波测距装置、定位装置、无线通讯装置,所述船状主体内设置有主控制器,所述主控制器分别与所述发射声换能器、所述接收换能器、所述温度传感器、所述成像控制器、所述驱动装置、所述超声波测距装置、所述定位装置和所述无线通讯装置电连接;
31、所述定位装置,用于对设备主体的位置进行定位;
32、所述超声波测距装置,用于设备检测水面障碍物距离躲避障碍物;
33、所述无线通讯装置,用于与云端服务器进行无线数据交互;
34、所述主控制器、发射声换能器和接收换能器,用于在主控制器的控制下通过发射声换能器发射声波,声波碰到水底及水中物体会产生回波,接收换能器接收回波,并将接收到的回波信号生成二维声学图像。
35、作为优选,所述船状主体内设置有数据存储模块,所述主控制器与所述数据存储模块电连接,用于记录设备主体位置信息,声学图像数据、图像时间、序号。
36、作为优选,所述船状主体内还设置有可充电电池,所述主控制器与所述可充电电池电连接。
37、有益效果:在本技术实施例中,采用完全自动统计的方式,通过获取预设水域范围内的鱼类数据;其中,所述鱼类数据包括:声学数据和图像数据;对所述鱼类数据进行预处理;通过目标检测算法识别图像中的鱼体目标并进行统计,再通过卡尔曼滤波算法对个体目标进行目标关联和跟踪;结合图像位置信息、图像时间信息以及鱼体目标关联和跟踪的预测结果对统计结果进行修正,以求和统计出水域内总的鱼量,达到了统计分析不再以“鱼群”为目标,而是以水域面积内的所有单体鱼为目标的目的,从而实现了避免了统计的遗漏和重复,使统计更精准的技术效果,进而解决了现有技术中,使用水下摄像头对水质的要求较高,无法实现远距离探测,且在浑浊的水中难以清楚的监测鱼群活动,以及鱼一般具有趋光性或避光性,影响鱼群的真实情况;同时,现有声纳技术多是以“鱼群”为目标,进行探测分析,而不是以单体为目标进行探测分析,误差较大的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!