一种零部件的位姿测量和对准方法及装置
本发明涉及零部件装配,尤其涉及一种零部件的位姿测量和对准方法及装置。
背景技术:
1、在零部件装配过程中,零部件之间大多通过一对或多对装配特征的贴合或配合实现定位和装配联接,但由于制造误差的存在,使得零部件上的装配特征偏离实际位置,可能会导致零部件之间无法装配到位,精确度差。尤其随着大重型设备自动化组装流程的快速发展,常常会涉及到尺度不一、具有复杂几何外形以及重量差距大的跨尺度零部件的装配,先进的零部件装配技术对于提高产品的制造质量、缩短工艺周期和降低产品成本等方面具有重要的意义。
2、但是,由于工业相机的景深和视野等因素的影响,使得零部件在装配过程中自动化效率低,大大地延长了相关产品的生产周期和生产成本。与此同时,零部件在装配过程中由于外界光线和机械臂误差等影响,传统的图像特征提取方法往往缺乏适应性,难以精准地实现零部件的位姿测量和对准。
3、因此,如何提高零部件在装配过程中位姿测量和对准的精确度是零部件装配技术领域亟待解决的重要课题。
技术实现思路
1、本发明提供一种零部件的位姿测量和对准方法及装置,用以解决现有技术中无法精确实现零部件在装配过程中的位姿测量和对准的缺陷,从而有效提高零部件在装配过程中位姿测量和对准的精确度。
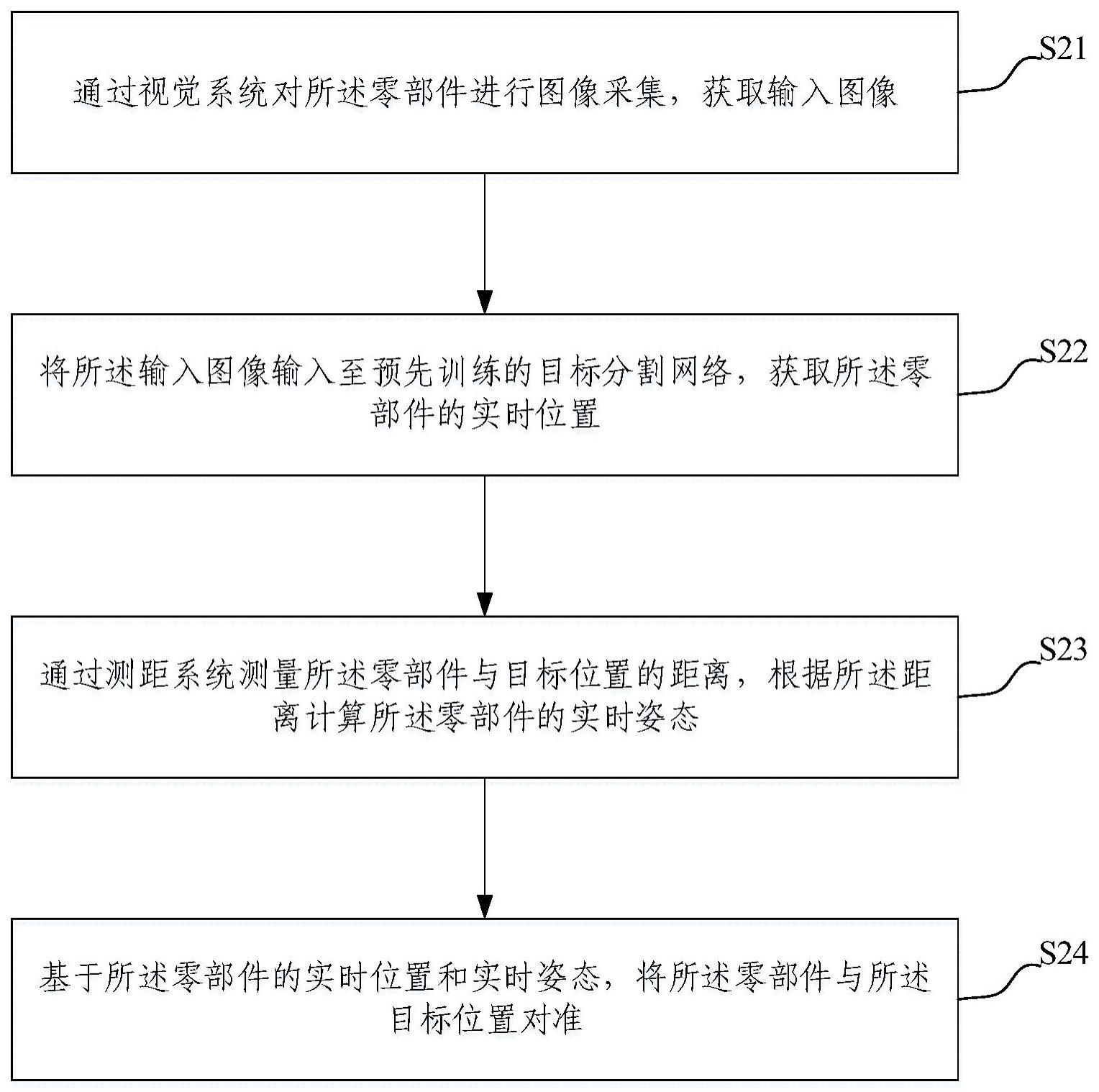
2、一方面,本发明提供一种零部件的位姿测量和对准方法,包括:通过视觉系统对所述零部件进行图像采集,获取输入图像;将所述输入图像输入至预先训练的目标分割网络,获取所述零部件的实时位置;通过测距系统测量所述零部件与目标位置的距离,根据所述距离计算所述零部件的实时姿态;基于所述零部件的实时位置和实时姿态,将所述零部件与所述目标位置对准。
3、进一步地,所述通过视觉系统对所述零部件进行图像采集,获取输入图像,包括:通过图像传感器对所述零部件进行图像采集,获取所述零部件的图像集合s;对所述图像集合s进行数据扩增,获取所述零部件的图像集合q;其中,所述图像集合q中的图像为所述输入图像。
4、进一步地,所述目标分割网络包括降维层、卷积层和升维层,所述目标分割网络的总层数为2k;其中,所述降维层和所述升维层的数量均为m-2,所述卷积层的数量为2(k-m+2),k和m均为大于3的整数且k>m-2。
5、进一步,所述零部件的位姿测量和对准方法还包括:通过视觉系统对所述零部件进行图像采集,获取训练图像;将所述训练图像输入至目标特征提取网络,获取目标特征图;将所述目标特征图和所述训练图像输入至所述目标分割网络进行训练,获取训练好的目标分割网络模型。
6、进一步地,所述目标特征提取网络包括卷积网络层和全连接网络层,所述目标特征提取网络的总层数为2m+1;其中,所述卷积网络层的数量为2m层,所述全连接网络层的数量为1。
7、进一步地,所述零部件的位姿测量和对准方法还包括:将所述训练图像输入至所述目标特征提取网络进行训练,获取训练好的目标特征提取网络模型。
8、进一步地,所述目标特征提取网络在训练过程中使用的损失函数为bcewithlogitsloss损失函数;所述目标分割网络在训练过程中使用的损失函数如下:
9、
10、其中,arg(x)为向量化函数,lloss为损失函数,h为所述输入图像的高度,w为所述输入图像的宽度,x为所述输入图像的像素,fi,j为标签为第i行第j列的所述输入图像的目标值,fi,j为输出的标签为第i行第j列的所述输入图像的估计值。
11、第二方面,本发明还提供一种零部件的位姿测量和对准装置,包括:图像获取模块,用于通过视觉系统对所述零部件进行图像采集,获取输入图像;位置确定模块,用于将所述输入图像输入至预先训练的目标分割网络,获取所述零部件的实时位置;姿态确定模块,用于通过测距系统测量所述零部件与目标位置的距离,根据所述距离计算所述零部件的实时姿态;部件对准模块,用于基于所述零部件的实时位置和实时姿态,将所述零部件与所述目标位置对准。
12、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述零部件的位姿测量和对准方法的步骤。
13、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述零部件的位姿测量和对准方法的步骤。
14、第五方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述零部件的位姿测量和对准方法的步骤。
15、本发明提供的零部件的位姿测量和对准方法,通过在装配过程中视觉系统对零部件图像的实时采集,从采集的图像中获取输入图像,并将该输入图像输入到预先训练好的目标分割网络中,获取该零部件的实时位置;在此基础上,根据测距系统实时测量零部件与目标位置的距离,计算获得零部件的实时姿态信息;根据获取的零部件的实时位置和实时姿态信息,即该零部件的实时位姿,将该零部件与进行装配的目标位置进行对准,解决了现有技术中无法精确实现零部件在装配过程中的位姿测量和对准的缺陷,有效地提高了零部件在装配过程中位姿测量和对准的精确度。
技术特征:
1.一种零部件的位姿测量和对准方法,其特征在于,包括:
2.根据权利要求1所述的零部件的位姿测量和对准方法,其特征在于,所述通过视觉系统对所述零部件进行图像采集,获取输入图像,包括:
3.根据权利要求1所述的零部件的位姿测量和对准方法,其特征在于,所述目标分割网络包括降维层、卷积层和升维层,所述目标分割网络的总层数为2k;其中,
4.根据权利要求3所述的零部件的位姿测量和对准方法,其特征在于,还包括:
5.根据权利要求4所述的零部件的位姿测量和对准方法,其特征在于,所述目标特征提取网络包括卷积网络层和全连接网络层,所述目标特征提取网络的总层数为2m+1;其中,所述卷积网络层的数量为2m层,所述全连接网络层的数量为1。
6.根据权利要求5所述的零部件的位姿测量和对准方法,其特征在于,还包括:将所述训练图像输入至所述目标特征提取网络进行训练,获取训练好的目标特征提取网络模型。
7.根据权利要求6所述的零部件的位姿测量和对准方法,其特征在于,所述目标特征提取网络在训练过程中使用的损失函数为bcewithlogitsloss损失函数;所述目标分割网络在训练过程中使用的损失函数如下:
8.一种零部件的位姿测量和对准装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述零部件的位姿测量和对准方法的步骤。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述零部件的位姿测量和对准方法的步骤。
11.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述零部件的位姿测量和对准方法的步骤。
技术总结
本发明提供一种零部件的位姿测量和对准方法及装置,其中的方法包括:通过视觉系统对零部件进行图像采集,获取输入图像;将输入图像输入至预先训练的目标分割网络,获取零部件的实时位置;通过测距系统测量零部件与目标位置的距离,根据距离计算零部件的实时姿态;基于零部件的实时位置和实时姿态,将零部件与目标位置对准。在本发明中,通过将视觉系统获取的输入图像输入至训练好的分割网络,得到零部件的实时位置,结合通过测距系统获取的零部件的实时姿态,得到零部件的实时位姿,从而实现零部件与目标位置的精确对准,有效地提高了零部件在装配过程中位姿测量和对准的精度。
技术研发人员:马文治,张磊,张大朋,梁滔,陈东生,张连新
受保护的技术使用者:中国科学院自动化研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!