基于配电线路基础数据的无人机巡检航线规划系统和方法与流程
本发明涉及无人机应用,尤其涉及一种基于配电线路基础数据的无人机巡检航线规划系统和方法。
背景技术:
1、随着无人机技术结合各个领域应用的快速发展,在各行各业中逐渐展现出它独特的优势;由于我国的输电线路广泛分布在大江南北,所处的地理位置以及周围环境通常十分复杂且恶劣,而为了保障国家电力系统的安全运行,需要定期对电力设施进行巡视检查,在此背景下,传统的巡检方式不仅会消耗巨大的人力物力,且效率以及安全系数都很低,而无人机巡检技术以其高效率、低成本且兼具高安全性等优点很好的解决了上述问题。
2、查阅相关已公开技术方案,如cn111536979a现有技术公开了一种基于随机优化的无人机巡检路径规划方法,包括对所有无人机、任务的起始节点、目标节点、充电站点建模,设置约束条件,包括环境约束、最大飞行距离约束、最大转弯角约束、转弯调整距离约束;其中,最大飞行距离约束考虑无人机在充电站点充电后飞行距离复原;建模优化目标,包括路径航程代价函数;随机优化求解优化目标,得到无人机巡检路径规划的最优解;此方案可保证无人机更高效的任务执行;另一种典型的公开号为cn111256703b的现有技术公开的一种多旋翼无人机巡检路径规划方法,分析影响多旋翼无人机巡检电池能耗的影响因素,确定悬停能耗以及巡航能耗;确定太阳光照与多旋翼无人机巡检航迹间关系;对扫描得到的待巡检物体三维点云模型进行建模,同时输入巡航过程中所有视点坐标;运用改进蚁群算法输出最优巡航路径、运用改进a*混合算法输出相邻两视点间的最优飞行路径,最终输出最优航迹。该方法能够为无人机巡检提供一条安全、低能耗、规避逆光的最优路径,提升多旋翼无人机自动巡检的安全性和可靠性;上述方案虽能提供给无人机巡检路径,但却不能保证该条巡检路径是可以巡查到所有路线的最优路径。
技术实现思路
1、本发明的目的在于,针对目前所存在的不足,提出了一种基于配电线路基础数据的无人机巡检航线规划系统和方法。
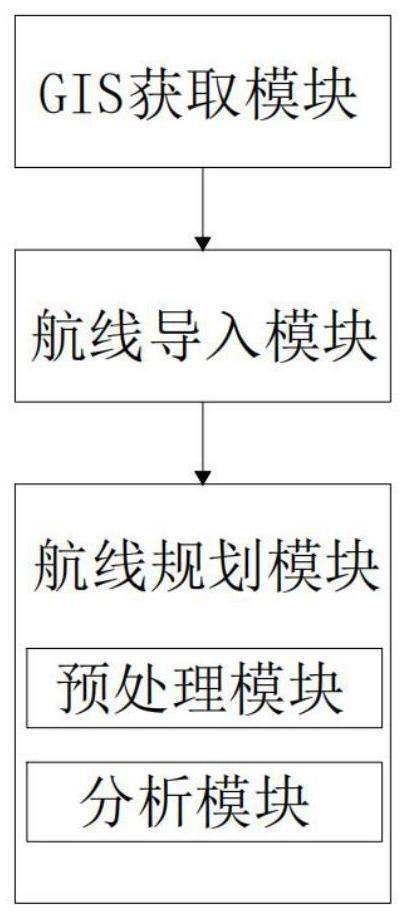
2、第一方面,本发明提供一种基于配电线路基础数据的无人机巡检航线规划系统,包括gis获取模块、航线导入模块和航线规划模块;
3、所述gis获取模块用于获取待巡检线路地理位置信息,所述航线导入模块用于根据待巡检线路地理位置信息生成基础巡检航线图,所述航线规划模块用于根据基础巡检航线图生成最优巡检航线;
4、所述gis获取模块通过与外部电业局gis系统连接获取待巡检线路地理位置信息,所述待巡检线路地理位置信息包括待巡检区域范围坐标及待巡检区域范围内所有配电线路坐标,所述航线导入模块将待巡检区域布置为一平面坐标图,并将所述配电线路坐标导入所述平面坐标图中并连接生成基础巡检航线图;
5、进一步的,所述航线规划模块包括预处理模块和分析模块,所述预处理模块用于根据无人机飞行能力布置生成多条基础航线,所述分析模块根据基础航线进行分析运算生成最优巡检航线;
6、进一步的,所述预处理模块在平面坐标图中设置起飞节点a和降落节点kn,并在所述基础巡检航线图中的航线上设置n-1个节点,设si为航线上任一节点ki与该节点的前一节点ki-1之间的路径,所述节点的设置满足:
7、-δθmax<δθi<δθmax;
8、其中,δθi为路径si与该路径的上一路径si-1之间的夹角,δθmax为无人机的最大偏转角;
9、所述预处理模块将所述航线上的节点顺序进行随机排列组合生成多条初始基础航线,每条初始基础航线用一组节点序列{a,k1,k2,k3,...,kn-1,kn}表示,其中a为起飞点,kn为降落点,ki为航线上的第i个节点,其中1≤i≤n-1;
10、所述预处理模块通过无人机的飞行能力在初始基础航线中筛选出符合无人机飞行条件的基础航线并将所述基础航线发送至分析模块,对于任意一条初始基础航线,选择的具体方式满足:
11、
12、其中,si为该初始基础航线中节点ki与ki-1间的路径,当i=1时s1为k1与起飞点a之间的路径;smax为无人机最大飞行路径;
13、进一步的,所述分析模块生成最优巡检航线的方式通过以下步骤进行:
14、s1:将所有预处理模块筛选出的初始基础航线加入到初始群组中;
15、s2:抽取群组中表现优良的初始基础航线;
16、s3:对抽取的初始基础航线中节点序列进行交叉换位运算生成若干新航线;
17、s4:计算若干新航线的评价值,找出其中最大的评价值,并计算该次计算的最大评价值与上一次获得的新航线评价值中最大评价值的差值是否大于阈值,首次计算新航线的评价值则不进行差值比较,如果所述差值大于阈值进入步骤s5,所述差值小于阈值则输出该次计算的最小评价值对应航线为最优巡航航线;
18、s5:将s3步骤中的若干新航线与s1步骤中的初始基础航线混合并择优选择生成若干新的初始基础航线,将新的初始基础航线加入到新的初始群组中,并重复s2~s4步骤;
19、进一步的,所述步骤s4中的评价值通过下式获得:
20、
21、
22、其中,fj为第j条新航线的评价值,qj为第j条新航线的评价系数,sji为第j条新航线中节点ki与ki-1间的路径,hj为第j条新航线的修正因子,qmax为该次运算中所有新航线中最大的评价系数,qmin为该次运算中所有新航线中最小的评价系数。
23、第二方面,本发明提供一种基于配电线路基础数据的无人机巡检航线规划方法,采用如上述第一方面所述的系统实现,包括:
24、获取待巡检线路的地理位置信息;
25、基于所述待巡检线路的地理位置信息生成基础巡检航线图;
26、基于所述基础巡检航线图生成最优巡检航线图;
27、其中,基于所述基础巡检航线图生成最优巡检航线图,进一步包括:
28、s1:从所述基础巡检航线图中筛选初始基础航线加入初始群组中;
29、s2:抽取群组中表现优良的初始基础航线;
30、s3:对抽取的初始基础航线中节点序列进行交叉换位运算生成若干新航线;
31、s4:计算若干新航线的评价值,找出其中最大评价值,并计算所述最大评价值与上一次获得的新航线评价值中最大评价值的差值是否大于阈值,首次计算新航线的评价值则不进行差值比较,如果所述差值大于所述阈值进入步骤s5,所述差值小于所述阈值则输出该次计算的最小评价值对应航线为最优巡航航线;
32、s5:将s3步骤中的若干新航线与s1步骤中的初始基础航线混合并择优选择生成若干新的初始基础航线,将新的初始基础航线加入到新的初始群组中,并重复s2~s4步骤。
33、本发明所取得的有益效果是:
34、通过gis获取模块和航线导入模块获取待巡检地区的配电线路基础航线位置,为寻找最优巡检航线提供计算基础;通过航线规划模块对航线规划节点并分析,从而可以找出无人机可以巡查到的所有线路中的最优巡检航线。
- 还没有人留言评论。精彩留言会获得点赞!