一种自动驾驶汽车边界条件下的实车测试系统及其方法
本发明涉及自动驾驶汽车电气测试,尤其是涉及一种自动驾驶汽车边界条件下的实车测试系统及其方法。
背景技术:
1、自动驾驶已经成为当今国内外学术界与工业界的研究热点之一,随着国内外自动驾驶技术的研究与发展,高等级自动驾驶已经进入研究的主要视线,而设计运行条件(operational design condition,odc)是区分不同等级自动驾驶系统的必备条件。目前围绕odc开展相关研究尚处于探索阶段,还未形成完善的odc计算方法或标准体系,在odc的实车测试领域也未形成成熟完善的测试系统及方法。面对新兴技术的自动驾驶产业,大量的汽车需要通过安全测试,来提升自动驾驶汽车的自动化技术,进而增强用户对自动驾驶汽车的信任。
2、在雨雾天气等边界条件下,自动驾驶汽车的摄像头或激光雷达探测准确度降低,准确识别前车并判断距离的功能受到干扰,进而影响到车辆在危险条件下的制动效果。为测试车辆在边界条件下车辆制动的效果,现有技术通常采用实车测试的方法,针对不同场景,即在不同环境下对不同的目标车辆运动状态、被测车的运动状态逐一进行测试。
3、现有的实车测试中,被测车、牵引车、气球车处于同一车道,牵引车及气球车位于被测车前方,牵引车在后方通过刚性连接装置与气球车相连接。然而这种方式只能测试跟车行驶工况,无法模拟如变道等其他场景模式,整个测试过程依赖于gps定位,每次测试前的复位都需要进行倒车、操作较为繁琐,存在模拟测试场景单一、依赖gps定位、车辆复位效率低等缺陷。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种自动驾驶边界条件下的实车测试系统及其方法,能够丰富测试场景、提高车辆复位效率,且不依赖于gps定位。
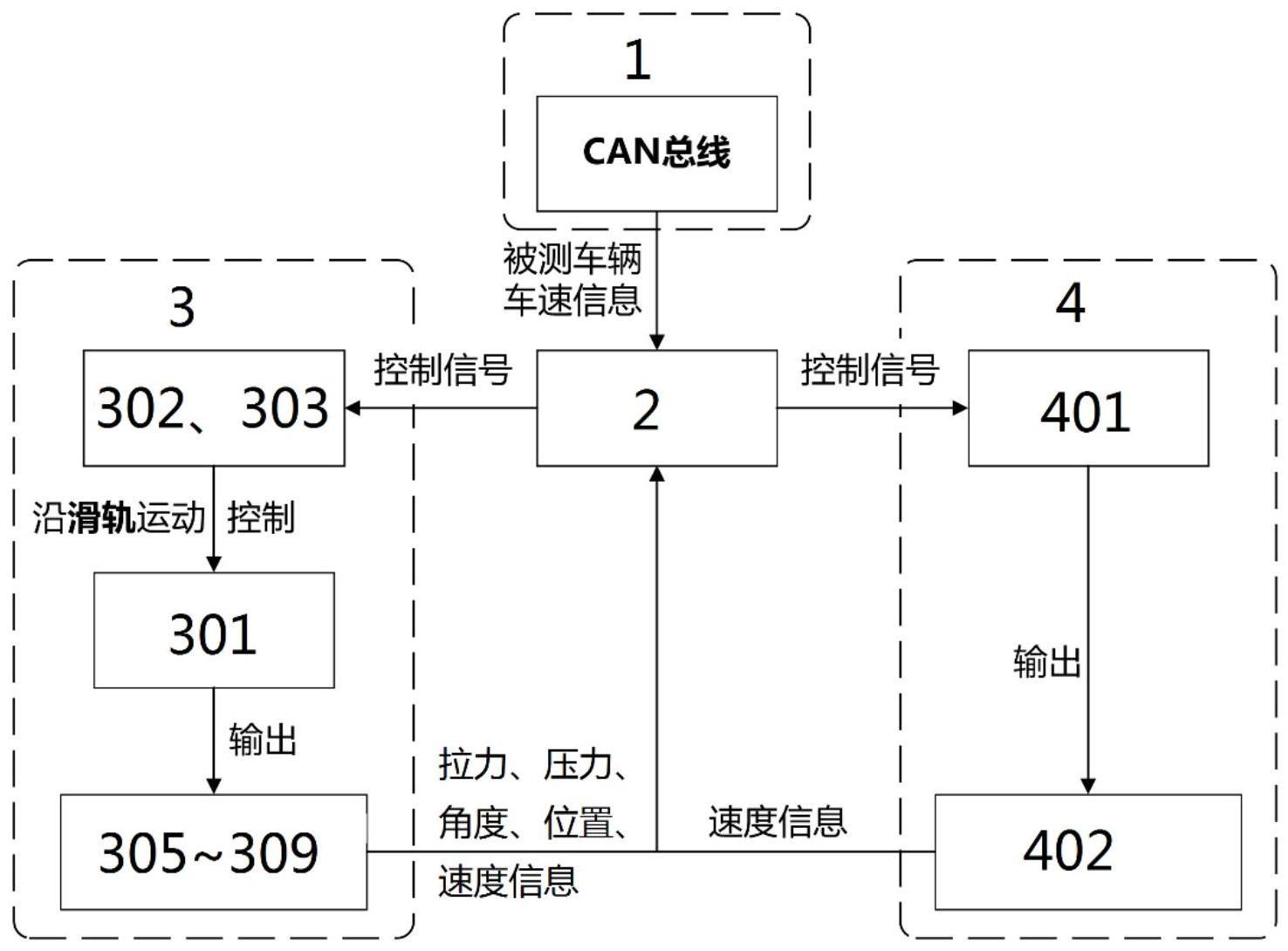
2、本发明的目的可以通过以下技术方案来实现:一种自动驾驶汽车边界条件下的实车测试系统,包括与被测车通信连接的工控机,所述工控机分别通信连接有气球车模组、牵引车模组,所述气球车模组包括设置于滑轨上的气球车,所述气球车上安装有舵机和牵引装置,所述牵引车模组包括牵引车,所述气球车位于被测车与牵引车之间,所述被测车、牵引车分别通过铰链与滑轨相连接;
3、所述工控机用于获取被测车的速度信息、牵引车的速度信息、滑轨所受拉力和压力信息、滑轨角度信息以及气球车的位置和速度信息,并进行处理分析,以输出对应控制信号给气球车模组及牵引车模组,从而控制气球车及牵引车的运动状态以及分析记录测试结果。
4、进一步地,所述被测车上的can(controller area network,控制器局域网)盒与工控机通信连接,以将被测车的速度信息传输至工控机。
5、进一步地,所述牵引车上安装有第一速度传感器,用于采集牵引车的速度信息、并传输至工控机。
6、进一步地,所述滑轨上安装有拉力传感器和压力传感器,用于采集滑轨所受拉力及压力信息、并传输至工控机。
7、进一步地,所述滑轨上安装有角度传感器、位置传感器和第二速度传感器,用于分别采集滑轨相对被测车角度信息、气球车在滑轨上位置信息和气球车相对滑轨速度信息,并传输至工控机。
8、进一步地,所述滑轨的安装高度与被测车的底盘高度相同。
9、进一步地,所述舵机安装在气球车的底部,所述舵机在工控机控制下发生水平内旋转、使得气球车朝向发生相应改变。
10、进一步地,所述牵引车的底部安装有四个麦克纳姆轮,所述四个麦克纳姆轮连接至差速控制单元,所述差速控制单元在工控机控制下计算并控制各个麦克纳姆轮的转速,实现牵引车的纵向及横向运动。
11、一种自动驾驶汽车边界条件下的实车测试方法,包括以下步骤:
12、s1、选择测试场景,所述测试场景包括但不限于跟车场景、前车汇入场景;
13、s2、根据选择的测试场景,由工控机计算出牵引车所需横纵向运动速度以及气球车所需运动速度,并相应控制牵引车及气球车的运动状态;
14、s3、启动被测车,工控机获取被测车的纵向速度信息,并相应控制牵引车达到相同的纵向速度;
15、s4、工控机获取滑轨所受拉力及压力信息,若滑轨所受压力信息超过预设压力阈值,则由工控机控制牵引车加速;
16、若滑轨所受拉力信息超过预设拉力阈值,则由工控机控制牵引车减速;
17、若滑轨所受拉力小于或等于预设拉力阈值、且滑轨所受压力小于或等于预设压力阈值,则执行步骤s5;
18、s5、工控机获取测试过程中被测车的速度信息、滑轨角度信息以及气球车的位置和速度信息,计算得到气球车与被测车之间的相对距离及相对速度、并进行测试结果记录;
19、s6、被测车倒车,工控机控制牵引车横向运动,所有车辆复位至初始位置,之后返回步骤s1开始新一轮测试。
20、进一步地,所述步骤s1中跟车场景具体为:被测车作为自车、气球车作为前车,自车保持当前车道、并跟随前车行驶;
21、所述步骤s1中前车汇入场景包括以下两种情况:
22、被测车作为自车、气球车作为前车,前车从左边车道向右变换车道,并入自车车道;
23、被测车作为自车、气球车作为前车,前车从右边车道向左变换车道,并入自车车道。
24、进一步地,所述步骤s2的具体过程为:
25、若测试场景为跟车场景,则由工控机控制牵引装置拖动气球车向被测车方向移动,模拟出跟车时前车制动的场景,其中气球车运动的速度与滑轨运动的速度叠加的合速度视为前车的速度;
26、若测试场景为前车汇入场景,则由工控机控制牵引装置拖动气球车向被测车方向移动,模拟前车并入自车车道同时前车进行制动的场景,此时工控机控制牵引车进行横、纵向运动,气球车相对于滑轨运动的速度与滑轨运动速度叠加,得出气球车与被测车的相对速度。
27、进一步地,所述步骤s2中,若测试场景为前车汇入场景,对于牵引车,工控机控制其横向速度为vpull_x=vfront_x、纵向速度为vpull_y=vpull_x*tanα+vego_y;
28、对于气球车,工控机控制其相对滑轨的运动速度vre满足vfront_y=vego_y+vpull_x*tanα-vre*cosα;
29、其中,vfront_y为前车的纵向速度,vfront_x为前车的横向变道速度,α为滑轨与自车之间的夹角,vego_y为自车的纵向速度。
30、进一步地,所述步骤s5中,当气球车与被测车的相对距离y小于或等于距离阈值a时,则工控机控制气球车减速直至停止运动,以避免与被测车相撞,该轮测试的结果视为发生碰撞,其中,vy1为被测车的纵向运动速度,vy2为气球车纵向运动速度,且vy1>vy2,b为被测车最大减速度;
31、若测试过程中任意时刻均存在y>a的情况,即视为未发生碰撞、测试成功;若测试过程中任意时刻出现y≤a的情况,即视为发生碰撞、测试失败。
32、与现有技术相比,本发明具有以下优点:
33、一、本发明通过设置与被测车通信连接的工控机,并将工控机分别与气球车模组、牵引车模组通信连接,其中,气球车模组包括设置于滑轨上的气球车,气球车上安装有舵机和牵引装置,牵引车模组则包括牵引车,气球车位于被测车与牵引车之间,被测车、牵引车分别通过铰链与滑轨相连接,利用工控机获取被测车的速度信息、牵引车的速度信息、滑轨所受拉力和压力信息、滑轨角度信息以及气球车的位置和速度信息,并进行处理分析,以输出对应控制信号给气球车模组及牵引车模组,从而控制气球车及牵引车的运动状态以及分析记录测试结果。由此能够大大提高气球车运动自由度,从而有效丰富测试场景的种类,并且由工控机控制牵引车发生横向运动,使其不偏离车道且不会发生甩尾现象,即可快速完成复位,不再依赖于gps定位,通过位置传感器数据即可得到车辆之间相对位置的变化。
34、二、本发明将被测车上的can盒与工控机通信连接,在牵引车上安装第一速度传感器,并在滑轨上安装拉力传感器、压力传感器、角度传感器、位置传感器和第二速度传感器,使得工控机能够及时可靠地获取到被测车的速度信息、牵引车的速度信息、滑轨所受拉力和压力信息、滑轨角度信息以及气球车的位置和速度信息,从而确保后续生成控制信号以及分析测试结果的准确性。
35、三、本发明中,工控机根据选择的测试场景以及获取的数据信息,从而相应计算出牵引车所需的横纵向运动速度、气球车所需的运动速度,并实时控制牵引车及气球车的运动状态,通过牵引车的运动和气球车在滑轨上的运动实现模拟不同测试场景的目标,且在直道场景和弯道场景均可进行测试。
36、四、本发明中,在被测车启动后,工控机首先获取被测车纵向车速,以相应控制牵引车达到相同的纵向车速,并且通过采集滑轨所受拉力及压力信息,以对应调节牵引车的纵向车速,实现对牵引车纵向速度的闭环控制、减小误差,有效确保滑轨尽可能不受到挤压或拉伸,提升测试过程的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!