定位偏差确定方法、装置、计算机设备和存储介质与流程
本申请涉及坐标定位,特别是涉及一种定位偏差确定方法、装置、计算机设备和存储介质。
背景技术:
1、随着物流科技的不断发展,越来越多的工厂决定使用机器来代替人工,其中物流agv(automated guided vehicle)也即“自动导引运输车”,是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。当下物流行业主要是依靠agv进而实现物流综合调度,随着agv在工厂的长时间运行,车辆的各部件均会磨损,进而导致车子定位、控制等出现偏差,偏差出现后往往需要在现场进行重新标定、维护,这需要人工介入,耗时耗力,由于偏差来源的多元性,误差的修正过程十分繁琐,因而无法实现准确高效的标定修正。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种定位偏差确定方法、装置、计算机设备和存储介质。
2、第一方面,本申请提供了一种定位偏差确定方法,所述方法包括:
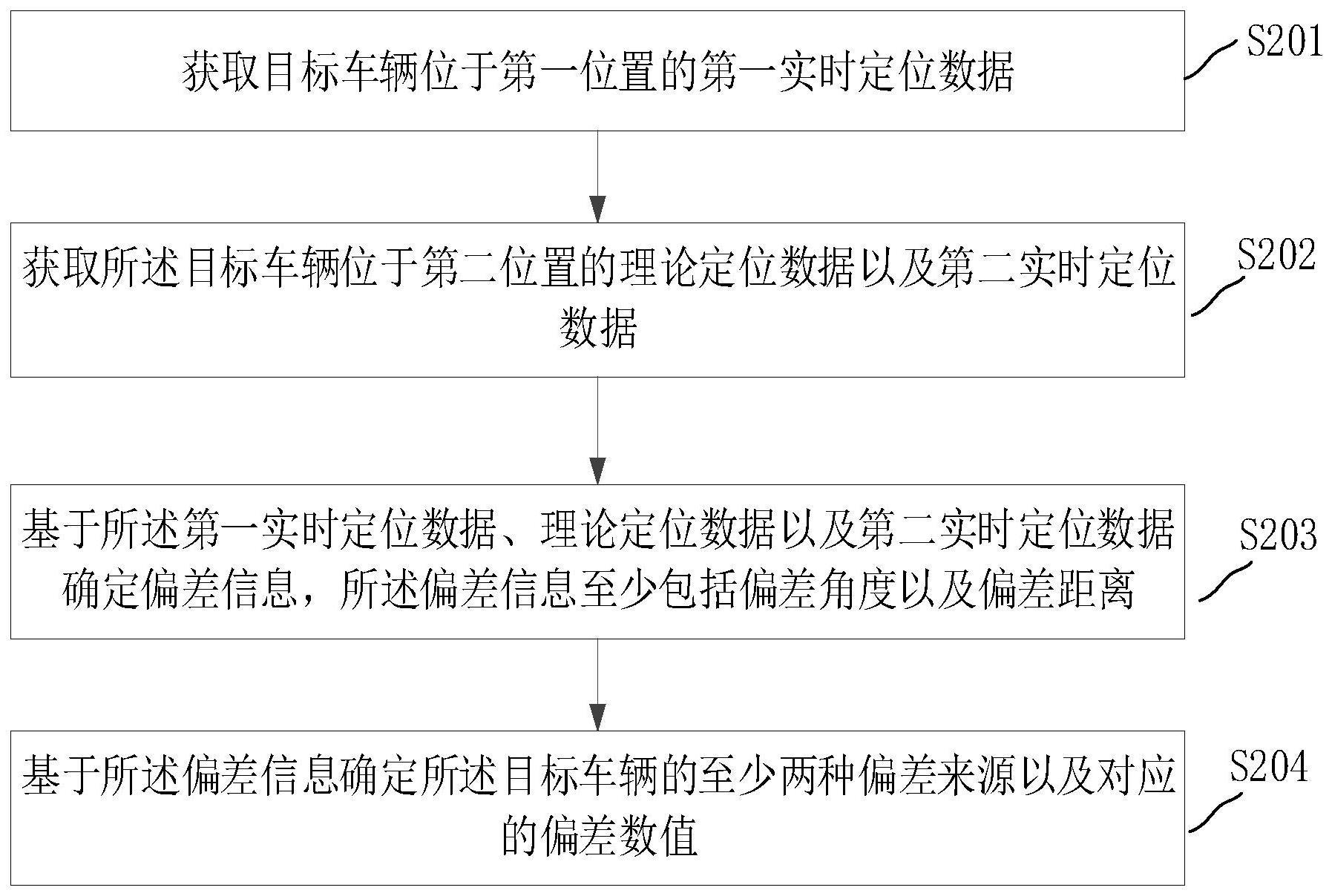
3、获取目标车辆位于第一位置的第一实时定位数据;
4、获取所述目标车辆位于第二位置的理论定位数据以及第二实时定位数据;
5、基于所述第一实时定位数据、理论定位数据以及第二实时定位数据确定偏差信息,所述偏差信息至少包括偏差角度以及偏差距离;
6、基于所述偏差信息确定所述目标车辆的至少两种偏差来源以及对应的偏差数值。
7、在其中一个实施例中,所述获取目标车辆位于第一位置的第一实时定位数据以及位于第二位置的第二实时定位数据包括:
8、获取第一定位图片以及第二定位图片,所述第一定位图片以及第二定位图片为车载相机连续两次采集的定位标志图的图片;
9、基于所述第一定位图片,确定第一实时定位数据,基于所述第二定位图片,确定第二实时定位数据。
10、在其中一个实施例中,所述基于所述偏差信息确定所述目标车辆的至少两种偏差来源以及对应的偏差数值包括:
11、基于所述偏差角度以及偏差距离确定所述目标车辆的运动方式;
12、基于所述目标车辆的运动方式、偏差角度以及偏差距离确定偏差来源以及对应的偏差数值。
13、在其中一个实施例中,所述基于所述偏差角度以及偏差距离确定所述目标车辆的运动方式包括:
14、当所述偏差距离不小于第一预设距离阈值并且偏差角度不大于预设角度阈值时,确定所述目标车辆的运动方式为直行;
15、当所述偏差距离不大于第二预设距离阈值并且偏差角度大于预设角度阈值时,确定所述目标车辆的运动方式为自转。
16、在其中一个实施例中,所述基于所述目标车辆的运动方式、偏差角度以及偏差距离确定偏差来源以及对应的偏差数值包括:
17、若所述目标车辆的运动方式为直行,基于所述偏差角度确定偏差来源为车轮参数偏差,并计算对应的车轮参数偏差值,基于所述偏差距离确定偏差来源为相机位置偏差,并计算对应的相机位置偏差值。
18、在其中一个实施例中,所述基于所述目标车辆的运动方式、偏差角度以及偏差距离确定偏差来源以及对应的偏差数值还包括:
19、若所述目标车辆的运动方式为自转,基于所述偏差角度确定偏差来源为车轮参数偏差,并计算对应的车轮参数偏差值,基于所述偏差距离确定偏差来源为相机位置偏差,并计算对应的相机位置偏差值。
20、在其中一个实施例中,所述基于所述偏差角度以及偏差距离确定所述目标车辆的至少两种偏差来源以及对应的偏差数值之后包括:
21、根据所述定位偏差值对所述目标车辆的实时定位数据进行修正。
22、第二方面,本申请还提供了一种定位偏差确定装置,所述装置包括:
23、第一获取模块,用于获取目标车辆位于第一位置的第一实时定位数据;
24、第二获取模块,用于获取所述目标车辆位于第二位置的理论定位数据以及第二实时定位数据;
25、确定模块,用于基于所述第一实时定位数据、理论定位数据以及第二实时定位数据确定偏差信息,所述偏差信息至少包括偏差角度以及偏差距离;
26、解耦模块,用于基于所述偏差信息确定所述目标车辆的至少两种偏差来源以及对应的偏差数值。
27、第三方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
28、获取目标车辆位于第一位置的第一实时定位数据;
29、获取所述目标车辆位于第二位置的理论定位数据以及第二实时定位数据;
30、基于所述第一实时定位数据、理论定位数据以及第二实时定位数据确定偏差信息,所述偏差信息至少包括偏差角度以及偏差距离;
31、基于所述偏差信息确定所述目标车辆的至少两种偏差来源以及对应的偏差数值。
32、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
33、获取目标车辆位于第一位置的第一实时定位数据;
34、获取所述目标车辆位于第二位置的理论定位数据以及第二实时定位数据;
35、基于所述第一实时定位数据、理论定位数据以及第二实时定位数据确定偏差信息,所述偏差信息至少包括偏差角度以及偏差距离;
36、基于所述偏差信息确定所述目标车辆的至少两种偏差来源以及对应的偏差数值。
37、上述定位偏差确定方法、装置、计算机设备和存储介质,通过获取目标车辆位于第一位置的第一实时定位数据;获取所述目标车辆位于第二位置的理论定位数据以及第二实时定位数据;基于所述第一实时定位数据、理论定位数据以及第二实时定位数据确定偏差信息,所述偏差信息至少包括偏差角度以及偏差距离;基于所述偏差信息确定所述目标车辆的至少两种偏差来源以及对应的偏差数值。上述定位偏差确定方法,能够在确定位置偏差信息后基于位置偏差信息确定不同的偏差来源,并将位置偏差进行在不同偏差来源下进行解耦,能够精准确定不同偏差来源下对应的位置偏差值,从而对目标车辆的定位数据对应进行校正,提高了目标车辆的定位偏差解耦计算准确度。
技术特征:
1.一种定位偏差确定方法,其特征在于,包括:
2.根据权利要求1所述的定位偏差确定方法,其特征在于,所述获取目标车辆位于第一位置的第一实时定位数据以及位于第二位置的第二实时定位数据包括:
3.根据权利要求1所述的定位偏差确定方法,其特征在于,所述基于所述偏差信息确定所述目标车辆的至少两种偏差来源以及对应的偏差数值包括:
4.根据权利要求3所述的定位偏差确定方法,其特征在于,所述基于所述偏差角度以及偏差距离确定所述目标车辆的运动方式包括:
5.根据权利要求3所述的定位偏差确定方法,其特征在于,所述基于所述目标车辆的运动方式、偏差角度以及偏差距离确定偏差来源以及对应的偏差数值包括:
6.根据权利要求3所述的定位偏差确定方法,其特征在于,所述基于所述目标车辆的运动方式、偏差角度以及偏差距离确定偏差来源以及对应的偏差数值还包括:
7.根据权利要求1所述的定位偏差确定方法,其特征在于,所述基于所述偏差角度以及偏差距离确定所述目标车辆的至少两种偏差来源以及对应的偏差数值之后包括:
8.一种定位偏差确定装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
上述定位偏差确定方法、装置、计算机设备和存储介质,通过获取目标车辆位于第一位置的第一实时定位数据;获取所述目标车辆位于第二位置的理论定位数据以及第二实时定位数据;基于所述第一实时定位数据、理论定位数据以及第二实时定位数据确定偏差信息,所述偏差信息至少包括偏差角度以及偏差距离;基于所述偏差信息确定所述目标车辆的至少两种偏差来源以及对应的偏差数值。上述定位偏差确定方法,能够在确定位置偏差信息后基于位置偏差信息确定不同的偏差来源,并将位置偏差进行在不同偏差来源下进行解耦,能够精准确定不同偏差来源下对应的位置偏差值,从而对应进行校正,提高了目标车辆的定位偏差解耦计算准确度。
技术研发人员:刘杰,黄鸿,王霞,杜鑫峰,朱玲芬
受保护的技术使用者:浙江国自机器人技术股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!