一种基于增强现实的导航方法、装置、系统及设备与流程
本发明涉及数据处理及导航领域,特别地,涉及一种基于增强现实的导航方法、装置、系统及设备。
背景技术:
1、增强现实(augmented reality,ar)技术是一种将虚拟信息与真实世界巧妙融合的技术,其将原本在真实世界的空间范围中比较难以进行体验的信息在电脑等科学技术的基础上,实施模拟仿真处理,形成虚拟信息,叠加在真实世界中,被人类感官所感知,从而实现超越现实的感官体验。
2、目前利用ar技术能够实现导航功能,但是利用ar导航功能,用户不易找到想要去的目的地,且导航过程不会根据现实情况进行实时修正路线,造成导航效率较低。
3、另外,目前导航用到的地理模型信息更新不够及时,严重落后于实际情况,无法为导航提供准确的地图信息,进而影响导航质量。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种基于增强现实的导航方法、装置、系统及设备,以解决现有ar导航时,用户不易找到想要去的目的地,且导航过程不会根据现实情况进行实时修正路线,造成导航效率较低的为问题。
2、本发明解决其技术问题所采用的技术方案是:
3、第一方面,提供一种基于增强现实技术的导航方法,包括以下步骤:
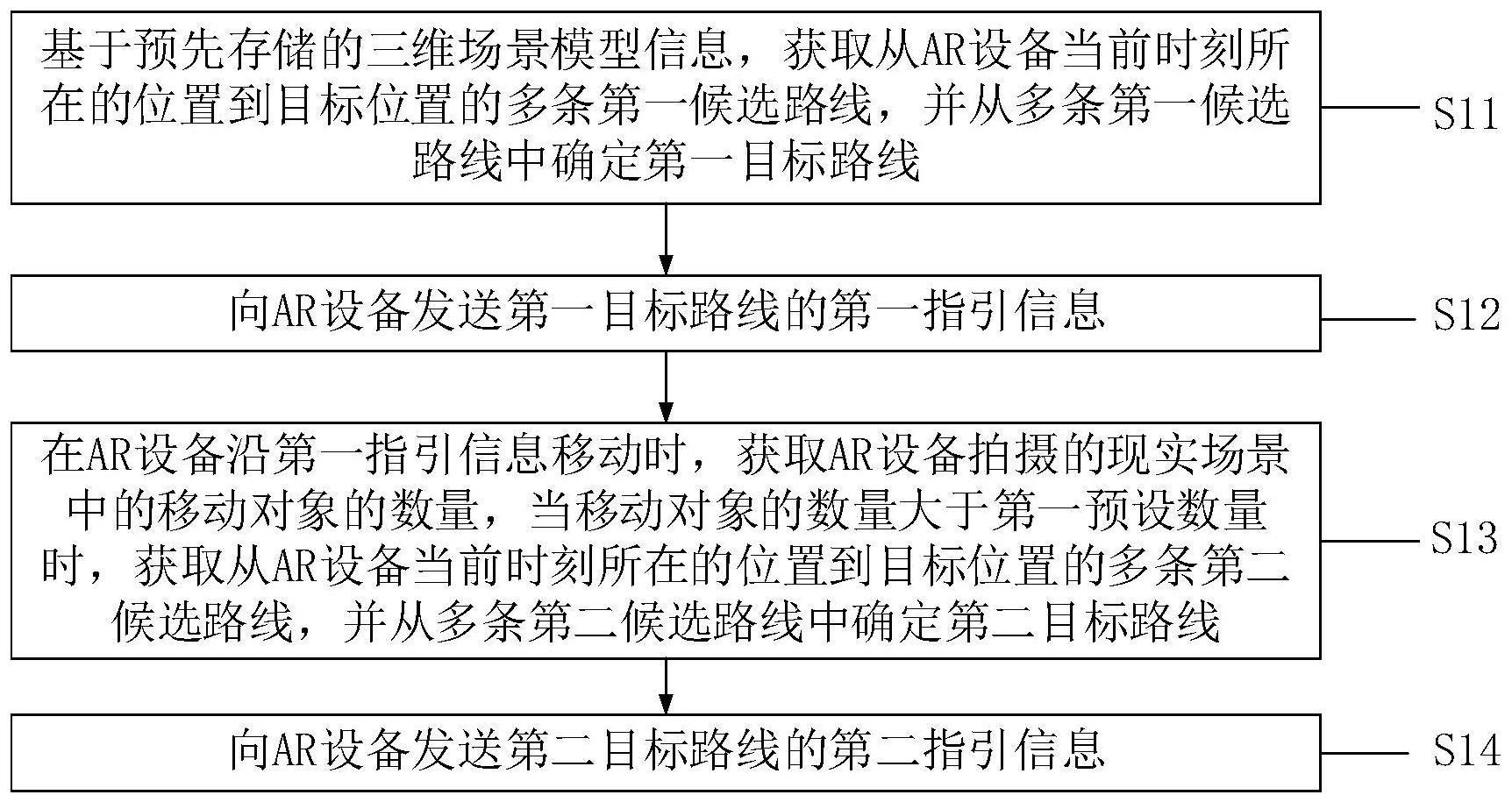
4、基于预先存储的三维场景模型信息,获取从ar设备当前时刻所在的位置到目标位置的多条第一候选路线,并从多条第一候选路线中确定第一目标路线,所述目标位置为用户想要到达的位置,每条所述候选路线包括至少一个关键地理对象;其中,所述三维场景模型信息是根据三维场景对应的的三维场景模型和所述三维场景内的区域结构数据生成的;所述区域结构数据是根据多个采集设备在所述三维场景内采集的数据确定的;并且在形成三维场景模型信息的区域结构数据的数据特征符合预设触发条件时更新所述三维场景模型信息;
5、向所述ar设备发送第一目标路线的第一指引信息,以使所述ar设备在当前的ar画面中显示到达所述第一目标路线中的关键地理对象的第一指引信息;
6、在所述ar设备沿所述第一指引信息移动时,获取所述ar设备拍摄的现实场景中的移动对象的数量,当所述移动对象的数量大于第一预设数量时,获取从ar设备当前时刻所在的位置到目标位置的多条第二候选路线,并从多条第二候选路线中确定第二目标路线,所述第二目标路线与所述第一目标路线为不相同的路线;
7、向所述ar设备发送第二目标路线的第二指引信息,以使所述ar设备在当前的ar画面中显示到达所述第二目标路线中的关键地理对象的第二指引信息。
8、在一种可能的实施方式中,所述从多条第二候选路线中确定第二目标路线,包括:
9、确定拥堵路段,所述拥堵路段为当前时刻ar设备拍摄的现实场景中移动对象的数量大于第二预设数量的路段;
10、将不包括拥堵路段的第二候选路线作为目标第二候选路线;
11、基于路线长度与路线长度分值之间的预设对应关系,由各所述目标第二候选路线的路线长度分别确定各所述目标第二候选路线的路线长度分值;
12、针对每个目标第二候选路线,基于关键地理对象的显著性信息与标志性分值之间的对应关系,由该目标第二候选路线上的各所述关键地理对象的显著性信息分别确定各关键地理对象的标志性分值,并根据该目标第二候选路线上的各所述关键地理对象的标志性分值,确定该目标第二候选路线目标标志性分值;其中,所述路线长度越小,路线长度分值越大,所述显著性信息表征的显著性越强,标志性分值越大;
13、根据所述路线长度分值和所述目标标志性分值,计算每条目标第二候选路线的路径得分,计算公式为:路径得分=路线长度分值*第一预设权重+目标标志性分值*第二预设权重;
14、将路径得分最高的一条目标第二候选路线作为第二目标路线。
15、在一种可能的实施方式中,所述从多条第一候选路线中确定第一目标路线包括:
16、分别确定各第一候选路线的路径长度所在的预设距离范围;
17、获取最小的预设距离范围对应的第一候选路线,作为目标第一候选路线;所述最小的预设距离范围为包括第一候选路线的最小的预设距离范围;
18、若所述目标第一候选路线的数量为一条,则将所述目标第一候选路线作为第一目标路线;若所述目标第一候选路线包括至少两条,且每条目标第一候选路线上关键地理对象的数量不同,则将关键地理对象数量最多的目标第一候选路线作为第一目标路线。
19、在一种可能的实施方式中,所述从多条第一候选路线中确定第一目标路线包括:
20、基于路径长度与路径长度分值之间的预设对应关系,由各所述第一候选路线的路径长度分别确定各所述第一候选路线的路径长度分值;
21、基于关键地理对象数量与关键地理对象分值之间的对应关系,由各所述第一候选路线对应的所述关键地理对象数量分别确定各所述第一候选路线的关键地理对象分值;所述路径长度越小,路径长度分值越大,所述关键地理对象数量越大,关键地理对象分值越大;
22、根据所述路径长度分值和所述关键地理对象分值,计算每条第一候选路线的路径得分,计算公式为:路径得分=路径长度分值*第三预设权重+关键地理对象分值*第四预设权重;
23、将路径得分最高的一条第一候选路线作为第一目标路线。
24、在一种可能的实施方式中,更新所述三维场景模型信息的步骤,包括:
25、在形成当前的三维场景模型信息的区域结构数据的数据特征符合预设触发条件的情况下,获取三维场景模型和新的区域结构数据;其中,所述新的区域结构数据是根据多个采集设备采集的第一历史数据确定的;所述数据特征包括区域结构数据的采集时间的均匀性特征、所述区域结构数据的采集地点的均匀性特征、所述区域结构数据针对三维场景对应的地理范围的完整性、所述区域结构数据的置信度中的至少一项;
26、将所述新的所述区域结构数据融合到所三维场景模型中,得到更新后的三维场景模型信息;
27、其中,获取新的区域结构数据包括:
28、获取多个采集设备采集的第一历史数据;
29、根据所述第一历史数据,确定需要进行数据采集的至少一个目标区域;
30、对所述至少一个目标区域进行聚类处理,得到至少一个聚类中心;
31、根据所述至少一个聚类中心,生成至少一条数据采集路线;
32、根据所述至少一条数据采集路线,生成至少一个众包采集任务;
33、分别将各个所述众包采集任务分配给对应的采集设备;
34、获取各个采集设备基于对应的众包采集任务反馈的采集数据;
35、根据所述采集数据,确定所述新的区域结构数据。
36、在一种可能的实施方式中,确定ar设备当前时刻所在的位置,包括:
37、获取增强现实ar设备当前时刻拍摄的现实场景图像,计算所述现实场景图像和各标准场景图像的相似度;其中,所述三维场景模型信息中存储有三维场景内在各个预设位置进行拍摄得到的标准场景图像;
38、若存在目标标准图像与所述现实场景图像的相似度大于第一预设相似度,则将所述目标标准图像对应的预设位置作为所述ar设备当前时刻所在的位置。
39、在一种可能的实施方式中,确定ar设备当前时刻所在的位置,包括:
40、根据所述三维场景模型信息确定简化三维场景模型信息,所述简化三维场景模型信息中包括在关键地理对象所在位置进行拍摄得到的标准场景图像;
41、将所述所述简化三维场景模型信息存入所述ar设备中;
42、当无法获取三维场景模型信息时,计算所述ar设备当前时刻拍摄得到的现实场景图像与所述简化三维场景模型信息对应的各标准场景图像的相似度;
43、若存在与所述现实场景图像的相似度大于第二预设相似度的标准场景图像,则将该标准场景图像对应的关键地理对象所在位置作为所述ar设备当前时刻所在的位置。
44、第二方面,本发明提供了一种基于增强现实技术的导航装置,包括:
45、第一目标路线确定模块,用于基于预先存储的三维场景模型信息,获取从ar设备当前时刻所在的位置到目标位置的多条第一候选路线,并从多条第一候选路线中确定第一目标路线,所述目标位置为用户想要到达的位置,每条所述候选路线包括至少一个关键地理对象;其中,所述三维场景模型信息是根据三维场景对应的的三维场景模型和所述三维场景内的区域结构数据生成的;所述区域结构数据是根据多个采集设备在所述三维场景内采集的数据确定的;并且在形成三维场景模型信息的区域结构数据的数据特征符合预设触发条件时更新所述三维场景模型信息;
46、第一指引信息发送模块,用于向所述ar设备发送第一目标路线的第一指引信息,以使所述ar设备在当前的ar画面中显示到达所述第一目标路线中的关键地理对象的第一指引信息;
47、第二目标路线确定模块,用于在所述ar设备沿所述第一指引信息移动时,获取所述ar设备拍摄的现实场景中的移动对象的数量,当所述移动对象的数量大于预设数量时,获取从ar设备当前时刻所在的位置到目标位置的多条第二候选路线,并从多条第二候选路线中确定第二目标路线,所述第二目标路线与所述第一目标路线为不相同的路线;
48、第二指引信息发送模块,用于向所述ar设备发送第二目标路线的第二指引信息,以使所述ar设备在当前的ar画面中显示到达所述第二目标路线中的关键地理对象的第二指引信息。
49、第三方面,本发明提供了一种基于增强现实技术的导航系统,包括:导航处理端、上述的ar设备和上述多个采集设备;所述导航处理端用于执行上述基于增强现实技术的导航方法。
50、第四方面,本发明提供了一种电子设备,包括:
51、处理器;
52、用于存储所述处理器可执行指令的存储器;
53、所述处理器被配置为用于执行上述基于增强现实技术的导航方法。
54、有益效果:
55、本技术技术方案提供一种基于增强现实的导航方法、装置、系统及设备,在根据三维场景模型信息确定第一目标路线之后,ar设备能够显示到达第一目标路线中的关键地理对象的第一指引信息;用户持ar设备沿第一指引信息移动时,若移动对象的数量大于预设数量,则说明当前路线较为拥堵,此时自动更换第二候选路线,避开拥堵路段,这样在ar导航过程中,能够根据实际情况修正路线,提高导航效率。另外,本方案中在形成三维场景模型信息的区域结构数据的数据特征符合预设触发条件时更新三维场景模型信息,能够有效避免更新不及时的问题,有助于提高导航的准确性和导航效率。
- 还没有人留言评论。精彩留言会获得点赞!