一种穿孔模型半径、深度测量系统及方法
本发明涉及测量,具体涉及一种穿孔模型半径、深度测量方法。
背景技术:
1、近年来随着机器元件的微型化,对制作加工的精度要求越来越高。因此精密器件的产后检测显得极为重要,如若实际生产的尺寸与需求误差过大会影响产品的质量和工作效率进而产生更加严重的后果。
2、目前,对于元件的测量主要包括接触式测量和非接触式测量。接触式测量中卡尺、千分尺、三坐标测量机均存在测量效果较差、效率低、应用范围有限的缺陷;而非接触式测量中结构光测量、激光扫描技术易受光照等因素的影响,测量精度差。
技术实现思路
1、本发明的目的在于,针对现有技术的不足,提供一种测量效率高、精度高的穿孔模型的半径、深度测量方法。
2、本发明采用的技术方案为:一种穿孔模型半径、深度测量系统,包括三维移动装置、光谱共焦传感器和计算机;
3、所述三维移动装置包括横向移动板件、纵向移动板件和竖向移动架;
4、待测量的穿孔模型固定于横向移动板件上,横向移动板件安装于纵向移动板件上,纵向移动板件设于测量平台上;
5、所述竖向移动架呈l型,竖向移动架的水平端固定有光谱共焦传感器,光谱共焦传感器的探头竖直向下;所述光谱共焦传感器和三维移动装置均分别与计算机相连,计算机可控制三维移动装置的横向移动板件、纵向移动板件和竖向移动架移动。
6、本发明还提供了一种穿孔模型半径、深度测量方法,包括以下步骤:
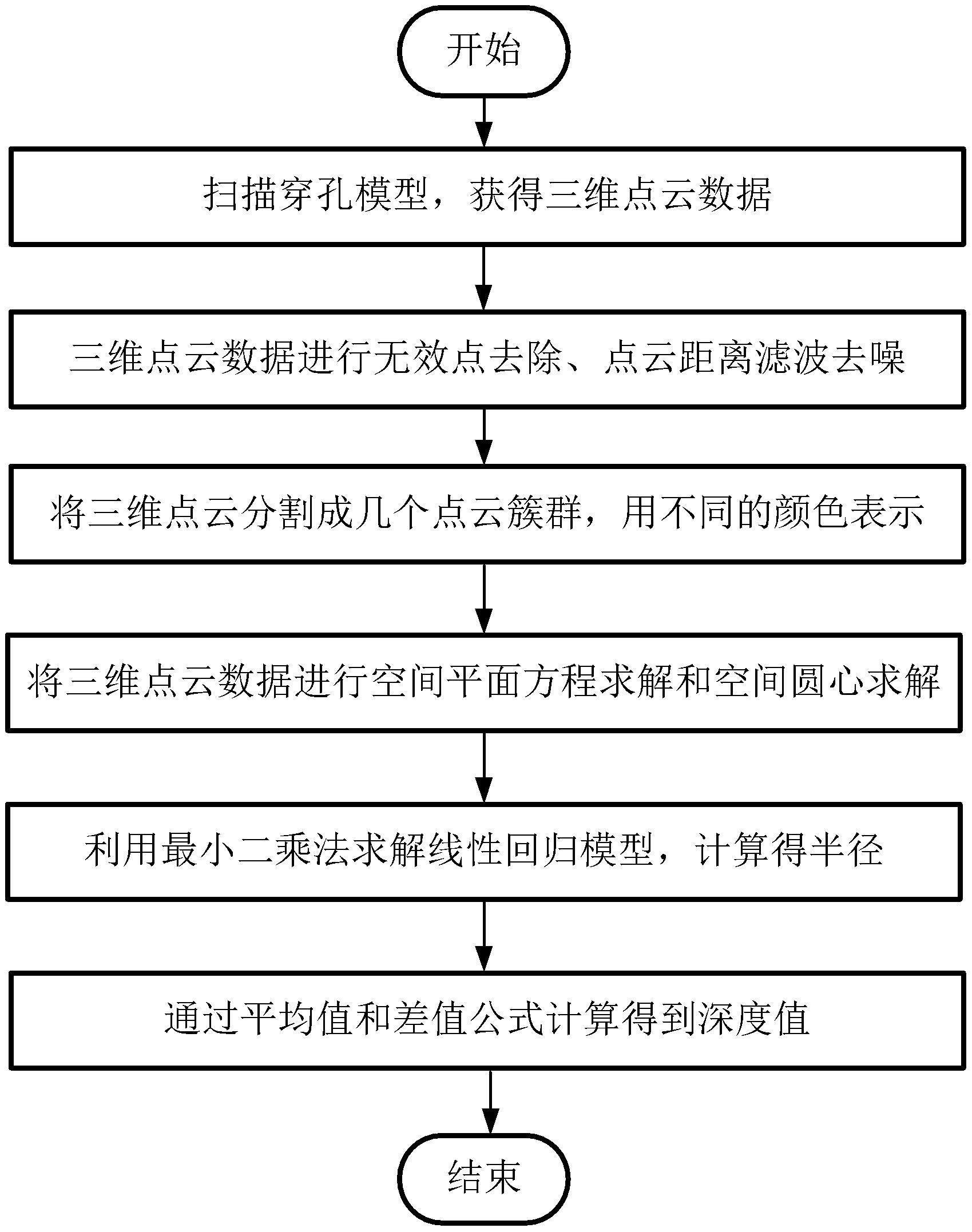
7、s1:搭建如上所述的穿孔模型半径、深度测量系统,建立三维直角坐标系,利用穿孔模型半径、深度测量系统的探头扫描穿孔模型,获得穿孔模型的三维点云数据;
8、s2:对三维点云数据进行无效点去除、点云滤波去噪、点云分割的操作处理,并更新三维点云数据;
9、s3:将步骤s2获得的三维点云数据所在的空间平面方程与空间圆心的空间圆拟合,利用最小二乘法求解线性模型代入空间圆方程,获得穿孔模型在该位置的半径值数据,再计算深度值数据。
10、按上述方案,s3中半径值数据的具体计算方法为:
11、将穿孔模型顶部数据所在的空间平面方程与空间圆心的空间圆拟合,利用最小二乘法求解线性回归模型代入空间圆方程,得到穿孔模型的半径;基于线性回归模型的空间圆拟合方法如下:
12、(1)、定义空间平面方程的一般式,其中、、分别为该平面法向量的三个分量;
13、(2)、在分割后的点云数据集合中任意取n次三个点、、;
14、(3)、法向量公式,其中表示向量的叉积,代入上述三个随机点得,其中即为法向量的三个分量;
15、(4)、任意选择一点,利用点法式计算空间平面方程:
16、,
17、进一步可以得到:
18、,
19、因此,空间平面方程的系数为:
20、;
21、因此,空间平面方程为:
22、;
23、(5)、假设空间圆的圆心为,则空间圆的一般方程为:
24、,
25、其中r为空间圆的半径;
26、(6)、将第二步n次任取的三个点代入空间圆方程中,得到如下方程:
27、,
28、整理得到:
29、;
30、(7)、建立系数方程:
31、;
32、(8)、通过系数方程可以求得空间圆心坐标;
33、(9)、将点云集合上的每个点到圆心的距离作为因变量,样本点坐标作为自变量,建立线性回归模型:对于每个点到圆心的距离 di可以表示为:
34、,
35、也即,
36、上式中表示点的坐标,为圆心坐标;
37、(10)、将每个点到圆心的距离平方作为因变量,各个点的坐标为自变量,构建设计矩阵和响应向量:
38、,
39、其中表示样本点的数量,>4;中每一行对应一个样本点的坐标,第一列全部为1,对应线性回归模型中的截距;
40、(11)、利用最小二乘法求解线性回归模型:
41、,
42、其中,表示模型参数,表示误差,利用最小二乘法求出参数向量;由构成,是线性回归模型的系数;
43、(12)、将线性回归模型和代入空间圆方程中得到:
44、,
45、根据样本点可以得到线性方程组,最终解开方程组,求得半径r数据;
46、(13)、利用点到空间平面的距离求平均值的方法,获得穿孔模型的深度数据。
47、按上述方案, s3(13)的具体方法为:
48、第一拟合平面为穿孔模型顶部数据的拟合平面,第二拟合平面为穿孔模型底部数据的拟合平面,步骤s3(1)的空间平面方程为第一拟合平面的方程,其中、、分别为该平面法向量的三个分量,采用相同方法获得第二拟合平面的空间平面方程,其中、、分别为该平面法向量的三个分量;在第一拟合平面中随机选取m个点,求任意一点到第二拟合平面的平均距离 hb:
49、,
50、在第二拟合平面中随机选择n个点,求任一点到第一拟合平面的平均距离 hi:
51、,
52、根据下式求得深度 hd:
53、。
54、按上述方案,s2的具体方法为:
55、s21:在初始三维点云数据中,去除掉z轴坐标为0的无效点,利用距离滤波算法,通过设置滤波方向和滤波上下限的参数值,过滤掉z轴区间内和x轴区间内的噪声点,得到平滑的三维点云数据;
56、s22:将平滑的三维点云数据利用点云分割算法得到多个不同的点云簇群,且采用不同的颜色区分点云簇群;
57、s23:更新分割后的点云数据。
58、按上述方案,s22中,采用异距离分割算法,具体步骤为:
59、(1)、定义一组点云,其中表示第个点在三维空间中的坐标,i取值1,2,…,n,n表示为点云中样本点的数量;
60、(2)、随机选择n个起始点作为中心点;在附近构建kd-tree,并通过kd-tree近邻搜索算法找到每个点附近k个点;将以及对应的k个近邻点加入集合簇中;假设某一近邻点为,坐标为,与之间的距离 dij为:
61、,
62、集合簇中近邻点到的平均距离 dave的公式为:
63、,
64、将所有中心点的平均距离求平均值,作为阈值 dave:
65、;
66、(4)、对于一个新的样本点,计算其到集合簇中各样本点 xi的距离:
67、,
68、其中为协方差矩阵的逆矩阵,取单位矩阵;
69、再计算样本点与到集合簇中各样本点距离的平均值 d:
70、;
71、(4)、将与阈值作比较,如果<,将样本点加入原有的集合簇中,反之归入到新的簇中;
72、(5)、重复进行步骤(3)~(4),直到不再有距离小于的点为止,代表此簇聚类完成;
73、(6)、再次选取新的聚类中心,重复步骤(2)~(5),直到不再有新的聚类点产生;
74、(7)、将各点云簇群采用不同的颜色区分。
75、按上述方案,s1包括以下步骤:
76、s11:搭建所述的穿孔模型半径、深度测量系统;
77、s12:实验人员控制三维移动装置带动探头扫描待测的穿孔模型,当探头发射出的白光分成连续的波长光谱,每个波长都聚焦在穿孔模型上外表面,形成垂直焦平面的矩形光斑,开始扫描采集模型并形成三维点云数据;
78、s13:探头扫描采集穿孔模型的轮廓数据,计算机的系统界面显示穿孔模型的三维点云数据。
79、本发明的有益效果为:
80、1.本发明中利用光谱共焦成像与三维移动装置结合,采集工件数据形成有序精确的三维点云数据,点云数据进行滤波、去噪、分割、拟合和重建等,计算穿孔模型深度以及半径,实现了直观地采集待测工件三维点云数据的功能,进而获得目标数据,这一系统及方法测量的效率高,抗干扰能力强,测量精度高。
81、2.本发明基于空间平面方程和空间圆心求解的空间圆拟合操作,在此基础上加入了最小二乘法,使结果更加准确稳定。
82、3.本发明提出的系统及方法对穿孔模型进行扫描采集数据,计算机程序运行流畅稳定,适应性很好,对计算机要求不高;鲁棒性好,优化了人力物力资源,避免资源浪费。
83、4.本发明人工干预少,减少了人力物力的消耗大大节约了成本。
- 还没有人留言评论。精彩留言会获得点赞!