三维全场应变测量分析系统的制作方法
本发明涉及数字图像系统,具体涉及一种三维全场应变测量分析系统。
背景技术:
1、数字图像相关技术(dic)最早是在上世纪80年代初由i.yamaguchi和w.h.peters、w.f.ranson等人提出。近年来,国内外学者对该方法的理论不断发展和完善,将该方法广泛应用在航空航天材料、岩土材料、生物医学等的力学性能测试中。dic方法经过多年的发展,伴随着精度与速度的提高。例如快速零均值归一化算法(fast zero normalized crosscorrelation,fzncc)利用频域方法算法提高了整像素匹配的效率;在亚像素匹配方面,正向加性牛顿-拉弗森(forwards additive newton-raphson algorithm,fa-nr)精度优于拟合法、梯度法;反向组合高斯-牛顿算法(inverse compositional gaussian-newtonalgorithm,ic-gn)与fa-nr算法相比,速度提高近3-6倍;gao等在ic-gn算法基础上将一阶形函数提高到二阶,用于复杂变形匹配。
2、对于如何实现高效高精度的三维测试,需要采用合理的形函数。以往,立体匹配计算中对左图像序列的点云匹配、左右图像点云匹配均采用基于一阶形函数的二维数字图像相关法匹配,或者均采用基于二阶形函数的三维数字图像相关法。基于一阶形函数的二维数字图像相关法计算效率高,但精度差。二阶形函数的三维数字图像相关法计算效率低,但精度高。
技术实现思路
1、发明目的:针对现有技术存在的问题,本发明的目的是提供一种结合数字图像相关技术(dic)与双目立体视觉技术,通过追踪物体表面的散斑图像,实现变形过程中物体表面的三维坐标、位移及应变动态测量的三维全场应变测量分析系统,具有便携,速度快,精度高,易操作等特点。
2、技术方案:本发明所述的一种三维全场应变测量分析系统,包括被测试样和光源,所述被测试样前方布置有双目相机,所述双目相机和计算机电性连接;
3、所述双目相机利用两台相机从不同角度拍摄被测试样,获取被测试样不同角度的表面散斑图像;所述计算机已知两台相机的相对位置关系,接收所述双目相机采集的图像,根据图像对应点的视差,利用三角测量法还原被测试样表面散斑的位移和变形情况;具体步骤如下:
4、(1)通过标定获得相机的内参和外参以及双目相机之间的旋转、平移矩阵;
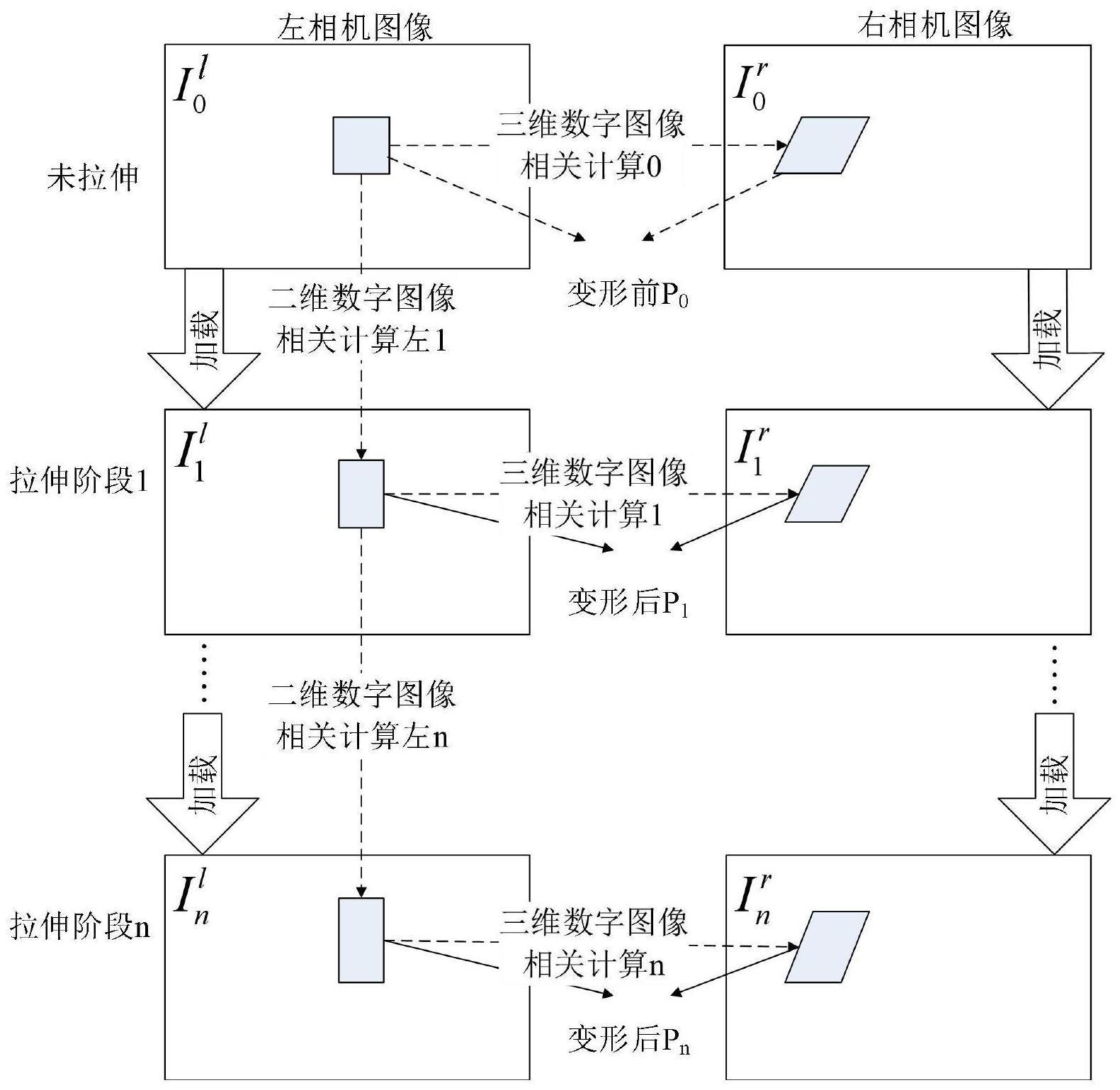
5、(2)试样未拉伸时,两台相机同时采集试样图像,记为左图像右图像在左图像上标记出需要计算的感兴区域,在感兴区域内以阵列方式等间隔选取若干整像素点作为点云,间隔一般为5-20个像素,通过基于二阶形函数的三维数字图像相关法计算获得右图像上对应的点云各点的像素坐标,利用左右点云,借助相机标定数据和三角法测量法得到变形前点云的三维空间坐标矩阵p0;
6、(3)当试样拉伸时,两台相机同时采集试样图像,分别获得拉伸阶段1,2……n-1,n的左图像序列右图像序列通过二维数字图像相关法,结合未变形左图像计算获得左图像上点云各点的像素坐标,通过三维数字图像相关法计算获得右图像上对应的点云各点的像素坐标,利用左右点云的像素坐标,借助相机标定数据和三角法测量法得到变形后感兴区域中点云的三维空间坐标矩阵序列{p1,p2,p3……pn};
7、(4)将点云上矩阵序列{p1,p2,p3……pn}坐标值与矩阵p0相减,分别得到各阶段的点云变形量,通过变形量计算位移和变形,再进一步得到应变量。
8、优选的,所述两台相机均安装有调节机构,所述调节机构用于调节相机的拍摄角度。进一步的,所述调节机构和计算机电性连接。
9、优选的,通过棋盘格标定板获得相机的内参和外参以及双相机之间的旋转、平移矩阵。
10、进一步的,所述二维数字图像相关法使用一阶形函数作为匹配模型。采用一阶形函数来描述子区域变形情况时,子区域内某像素点位移表示为:
11、
12、其中,x′,y′为变形后子区域中某点的像素坐标,x0,y0为未变形子区域的中心点坐标,δx,δy为未变形子区域内某点距离中心点的坐标距离,u,v为变形子区域中心点位移量,ux,uy,vx,vy为一阶位移梯度。
13、进一步的,所述三维数字图像相关法使用二阶形函数作为匹配模型。采用二阶形函数来描述子区域变形情况时,子区域内某像素点位移表示为:
14、
15、其中,x′,y′为变形后子区域中某点的像素坐标,x0,y0为未变形子区域的中心点坐标,δx,δy为未变形子区域内某点距离中心点的坐标距离,u,v为变形子区域中心点位移量,ux,uy,vx,vy为一阶位移梯度,uxx,uyy,uxy,vxx,vyy,vxy为二阶位移梯度。
16、和现有技术相比,本发明具有如下有益效果:
17、在三维测试中,计算左图像序列或者右图像序列在不同阶段的变形时,由于图像变形主要是拉伸、剪切变形,可采用基于一阶形函数的二维数字图像相关法;计算同一阶段时左右图像序列对应的三维空间点坐标时,由于左右图像之间的变形主要是梯形等变形,可采用基于二阶形函数的三维数字图像相关法。这样分别采用不同的形函数,既提高了计算精度,又提高了计算效率。经验证,本发明的系统测量误差小于1um。
技术特征:
1.一种三维全场应变测量分析系统,包括被测试样和光源,其特征在于,所述被测试样前方布置有双目相机,所述双目相机和计算机电性连接;
2.根据权利要求1所述的三维全场应变测量分析系统,其特征在于,所述两台相机均安装有调节机构,所述调节机构用于调节相机的拍摄角度。
3.根据权利要求2所述的三维全场应变测量分析系统,其特征在于,所述调节机构和计算机电性连接。
4.根据权利要求1所述的三维全场应变测量分析系统,其特征在于,通过棋盘格标定板获得相机的内参和外参以及双相机之间的旋转、平移矩阵。
5.根据权利要求1所述的三维全场应变测量分析系统,其特征在于,所述二维数字图像相关法使用一阶形函数作为匹配模型。
6.根据权利要求5所述的三维全场应变测量分析系统,其特征在于,采用一阶形函数来描述子区域变形情况时,子区域内某像素点位移表示为:
7.根据权利要求1所述的三维全场应变测量分析系统,其特征在于,所述三维数字图像相关法使用二阶形函数作为匹配模型。
8.根据权利要求7所述的三维全场应变测量分析系统,其特征在于,采用二阶形函数来描述子区域变形情况时,子区域内某像素点位移表示为:
技术总结
本发明公开了一种的三维全场应变测量分析系统,包括被测试样和光源,所述被测试样前方布置有双目相机,所述双目相机和计算机电性连接;所述双目相机利用两台相机从不同角度拍摄被测试样,获取被测试样不同角度的表面散斑图像;所述计算机已知两台相机的相对位置关系,接收所述双目相机采集的图像,根据图像对应点的视差,利用三角测量法还原被测试样表面散斑的位移和变形情况。本发明结合数字图像相关技术与双目立体视觉技术,通过追踪物体表面的散斑图像,实现变形过程中物体表面的三维坐标、位移及应变的动态测量,具有便携,速度快,精度高,易操作等优点。
技术研发人员:卢宇,高书苑,李一芒,齐飞
受保护的技术使用者:常州高常科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!