信息定位方法、装置、系统、车辆及程序产品与流程
本申请涉及智能汽车,尤其涉及一种信息定位方法、装置、系统、车辆及程序产品。
背景技术:
1、随着汽车行业的蓬勃发展,人们对车辆的准确性和安全性的车辆服务要求越来越高。例如,在用户驾驶或泊车期间,为了给用户带来更有安全感的驾车体验,通常通过设置在车辆四周的雷达及摄像头采集车辆周围的环境信息,以为用户在驾驶和泊车期间提供影像帮助。
2、然而,在现有的环境信息采集方案中,通过设置在车辆四周的雷达及摄像头采集的环境信息并不准确,甚至存在“漏采”的现象,使得用户在驾驶及泊车期间存在安全隐患。
技术实现思路
1、本申请的多个方面提供一种信息定位方法、装置、系统、车辆及程序产品,用于提升对车辆周围采集环境信息的丰富度和准确性,降低用车风险。
2、本申请实施例提供一种用于车辆的信息定位方法,包括:接收目标车载传感器识别到的障碍物信息,所述目标车载传感器为一个或多个,所述障碍物信息至少包括障碍物与每个目标车载传感器之间的距离信息;根据所述目标车载传感器的数量和类型,确定用于定位所述障碍物的目标定位算法,所述类型包括远距离探测类型和近距离探测类型中的至少一种;根据所述障碍物信息和所述目标车载传感器的设置位置,采用所述目标定位算法,确定所述障碍物的位置信息。
3、在一可选实施例中,若所述目标车载传感器的数量为一个,根据所述目标车载传感器的数量和类型,确定用于定位所述障碍物的目标定位算法,包括:确定所述目标车载传感器对应的目标类型;根据所述目标类型和车载传感器的类型与定位算法的预设对应关系,确定用于定位所述障碍物的目标定位算法。
4、在一可选实施例中,若所述目标车载传感器的数量为多个且均为远距离探测类型,根据所述目标车载传感器的数量和类型,确定用于定位所述障碍物的目标定位算法,包括:根据车载传感器的类型与定位算法的预设对应关系,将所述远距离探测类型对应的第一定位算法作为用于定位所述障碍物的目标定位算法;或者,从多个目标车载传感器中确定第一车载传感器和第二车载传感器,将与所述第一车载传感器和第二车载传感器适配的三角定位算法确定为用于定位所述障碍物的目标定位算法。
5、在一可选实施例中,在所述第一定位算法作为所述目标定位算法的情况下,根据所述障碍物信息和所述目标车载传感器的设置位置,采用所述目标定位算法,确定所述障碍物的位置信息,包括:从多个目标车载传感器中确定一个第三车载传感器及其对应的设置位置;根据所述距离信息和所述第三车载传感器的设置位置,采用所述第一定位算法,确定所述障碍物的位置信息。
6、在一可选实施例中,在所述三角定位算法作为所述目标定位算法的情况下,根据所述障碍物信息和所述目标车载传感器的设置位置,采用所述目标定位算法,确定所述障碍物的位置信息,包括:根据所述第一车载传感器和所述第二车载传感器分别对应的设置位置,以及分别与所述障碍物之间的距离信息,采用所述三角定位算法,确定所述障碍物的位置信息。
7、在一可选实施例中,若所述目标车载传感器的数量为多个且包括近距离探测类型,根据所述目标车载传感器的数量和类型,确定用于定位所述障碍物的目标定位算法,包括:根据车载传感器的类型与定位算法的预设对应关系,将所述近距离探测类型对应的第二定位算法作为用于定位所述障碍物的目标定位算法。
8、在一可选实施例中,多个目标车载传感器中包括近距离探测类型的第一车载传感器,所述第一车载传感器识别到的障碍物信息还包括所述第一车载传感器相对于所述障碍物的方向信息;相应地,根据所述障碍物信息和所述目标车载传感器的设置位置,采用所述目标定位算法,确定所述障碍物的位置信息,包括:根据所述距离信息、所述方向信息和所述第一车载传感器的设置位置,采用所述第二定位算法,确定所述障碍物的位置信息。
9、在一可选实施例中,还包括:根据所述目标车载传感器的数量和类型,确定所述障碍物所在位置对应的目标区域;根据所述目标区域的类型,确定所述障碍物的位置信息;其中,所述目标区域包括一个目标车载传感器的探测范围对应的单独覆盖区域,或者多个目标车载传感器的探测范围共同对应的重叠覆盖区域。
10、本申请实施例还提供一种用于车辆的信息定位装置,包括:接收模块、第一确定模块和第二确定模块;所述接收模块,用于接收目标车载传感器识别到的障碍物信息,所述目标车载传感器为一个或多个,所述障碍物信息至少包括障碍物与每个目标车载传感器之间的距离信息;所述第一确定模块,用于根据所述目标车载传感器的数量和类型,确定用于定位所述障碍物的目标定位算法,所述类型包括远距离探测类型和近距离探测类型中的至少一种;所述第二确定模块,用于根据所述障碍物信息和所述目标车载传感器的设置位置,采用所述目标定位算法,确定所述障碍物的位置信息。
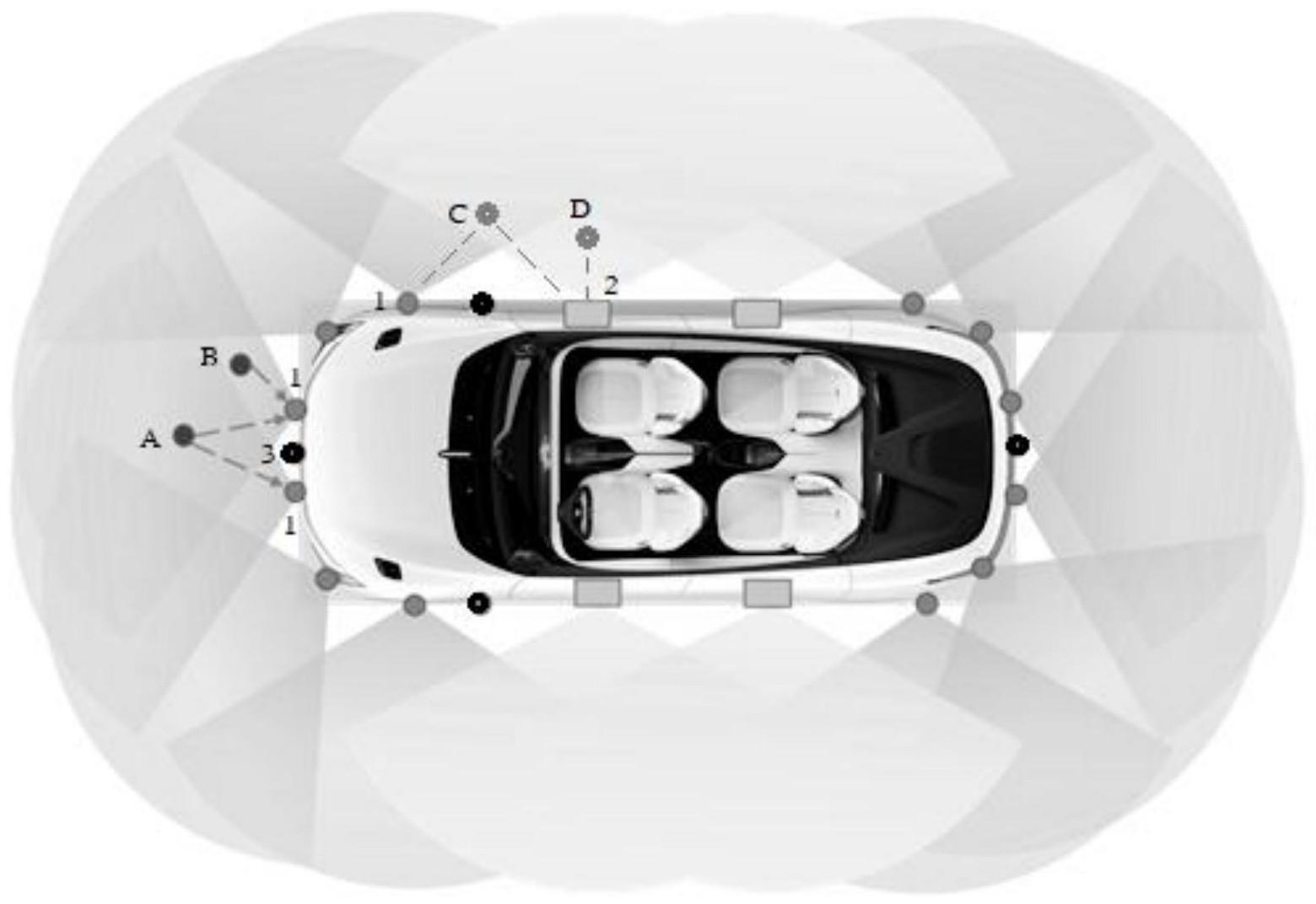
11、本申请实施例还提供一种用于车辆的信息定位系统,包括:控制器和多个定位装置,所述多个定位装置包括多个第一定位装置和多个第二定位装置;所述多个第一定位装置设置在所述车辆的首部和尾部,所述多个第二定位装置设置在所述车辆的两侧;所述控制器,用于接收目标定位装置识别到的障碍物信息,所述目标定位装置为一个或多个;以及根据所述目标定位装置的数量和类型,以及分别对应的设置位置和所述障碍物信息,确定障碍物的位置信息;其中,相邻定位装置的探测范围对应的覆盖区域之间存在重叠覆盖区域,所述多个第一定位装置和多个第二定位装置的探测范围可对所述车辆四周进行360度覆盖。
12、本申请实施例还提供一种车辆,包括所述的信息定位系统。
13、本申请实施例还提供一种计算机程序产品,包括计算机程序/指令,当所述计算机程序/指令被处理器执行时,实现所述方法中的步骤。
14、在本申请实施例中,过在车辆四周设置多种车载传感器,可以对车辆周围进行360°全覆盖,提升车周环境信息采集的丰富度;并且,根据不同类型车载传感器的探测特点,以及各车载传感器探测范围的覆盖区域之间的相对位置关系,可以采用不同定位方法确定不同位置的障碍物信息,定位准确性更高,有助于保障驾驶及泊车安全,降低用车风险。
技术特征:
1.一种用于车辆的信息定位方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,若所述目标车载传感器的数量为一个,根据所述目标车载传感器的数量和类型,确定用于定位所述障碍物的目标定位算法,包括:
3.根据权利要求1所述的方法,其特征在于,若所述目标车载传感器的数量为多个且均为远距离探测类型,根据所述目标车载传感器的数量和类型,确定用于定位所述障碍物的目标定位算法,包括:
4.根据权利要求3所述的方法,其特征在于,在所述第一定位算法作为所述目标定位算法的情况下,根据所述障碍物信息和所述目标车载传感器的设置位置,采用所述目标定位算法,确定所述障碍物的位置信息,包括:
5.根据权利要求3所述的方法,其特征在于,在所述三角定位算法作为所述目标定位算法的情况下,根据所述障碍物信息和所述目标车载传感器的设置位置,采用所述目标定位算法,确定所述障碍物的位置信息,包括:
6.根据权利要求1所述的方法,其特征在于,若所述目标车载传感器的数量为多个且包括近距离探测类型,根据所述目标车载传感器的数量和类型,确定用于定位所述障碍物的目标定位算法,包括:
7.根据权利要求6所述的方法,其特征在于,多个目标车载传感器中包括近距离探测类型的第一车载传感器,所述第一车载传感器识别到的障碍物信息还包括所述第一车载传感器相对于所述障碍物的方向信息;
8.根据权利要求1-7任一项所述的方法,其特征在于,还包括:
9.一种用于车辆的信息定位装置,其特征在于,包括:接收模块、第一确定模块和第二确定模块;
10.一种用于车辆的信息定位系统,其特征在于,包括:控制器和多个定位装置,所述多个定位装置包括多个第一定位装置和多个第二定位装置;所述多个第一定位装置设置在所述车辆的首部和尾部,所述多个第二定位装置设置在所述车辆的两侧;
11.一种车辆,其特征在于,包括如权利要求10所述的信息定位系统。
技术总结
本申请实施例提供一种信息定位方法、装置、系统、车辆及程序产品。在本申请实施例中,通过在车辆四周设置多种车载传感器,可以对车辆周围进行360°全覆盖,提升车周环境信息采集的丰富度;并且,根据不同类型车载传感器的探测特点,以及各车载传感器探测范围的覆盖区域之间的相对位置关系,可以采用不同定位方法确定不同位置的障碍物信息,定位准确性更高,有助于保障驾驶及泊车安全,降低用车风险。
技术研发人员:温雨莎,马聪
受保护的技术使用者:北京集度科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!