基于人工智能机器视觉的线缆全角度成像及质量检测装置的制作方法
本发明涉及线缆表面缺陷检测设备领域,尤其涉及一种基于人工智能机器视觉的线缆全角度成像及质量检测装置。
背景技术:
1、目前工业制造表面缺陷检测,尤其是高压电缆、光缆的生产制造领域,主要依靠人力来完成,仅仅依靠人力来进行产品的表面缺陷检测,存在以下问题:
2、一是人工质检效率低,精度无法保障,需专人24小时不间断发现缺陷,存在预警不及时,检测精度无法保障等问题。
3、二是人工质检成本高,一般产线24小时不间断生产,需配置专职质检人员3人,人力成本高。
4、三是易受外界环境、人员情绪、责任心影响,无法保障检出率。
5、人工质检会因质检人员的情绪、外界环境影响、责任心等因素,影响检出率;存在人工难以工作的环境,比如危险环境、温度较高、较低的工作环境。
6、四是数据保存不完整、不准确、数据丢失、遗漏等问题严重,人工质检缺陷数据手工记录,存在数据保存不完整、易丢失、数字化程度低。
技术实现思路
1、为了解决以上技术问题,本发明提供了一种基于人工智能机器视觉的线缆全角度成像及质量检测装置。解决目前线缆表面缺陷过程中的问题,大幅度的降低人工检测带来的误差和漏检率,实现检测全过程的人工智能替代,进而大幅提高产品质量及降低生产成本。
2、本发明的技术方案是:
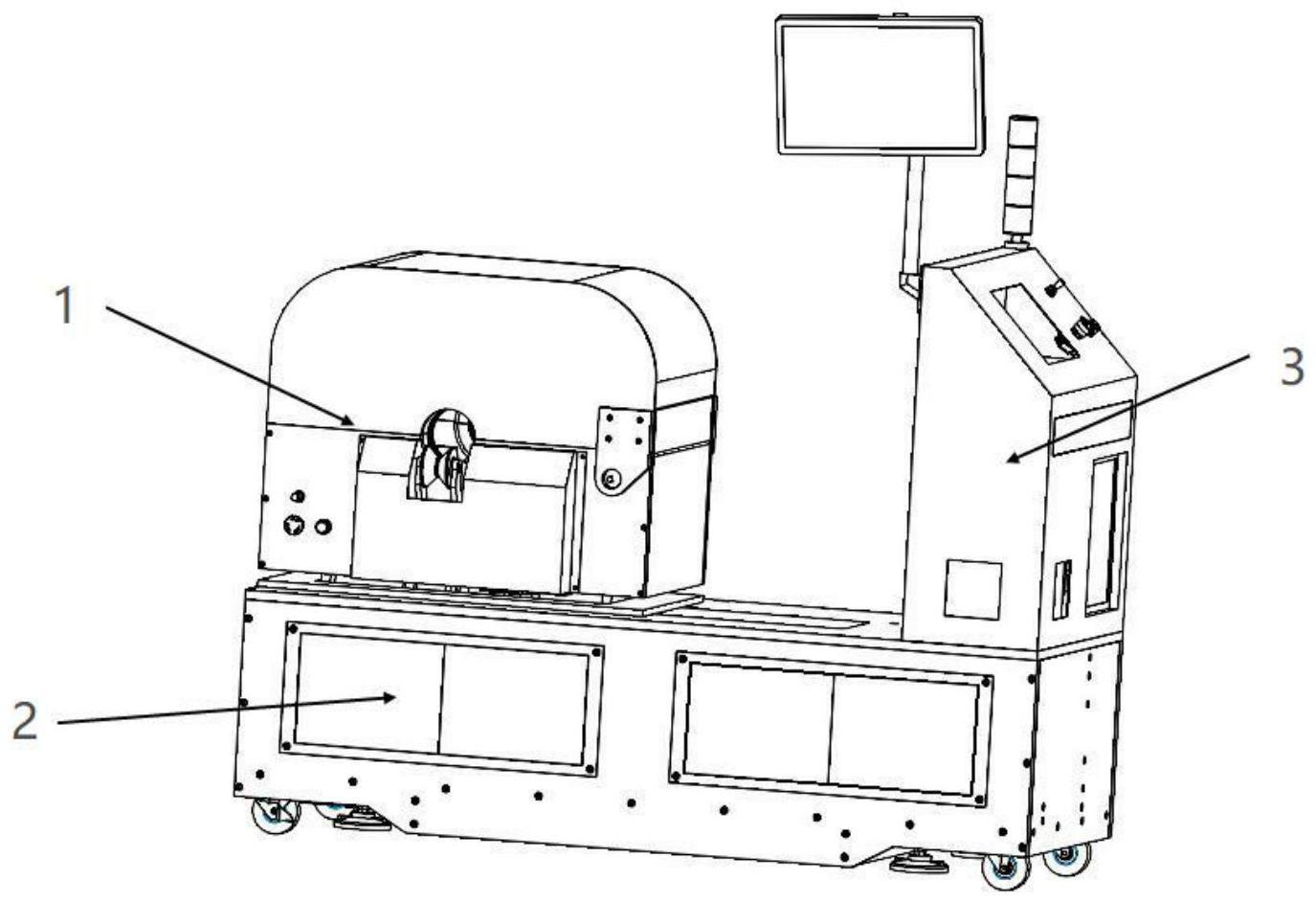
3、一种基于人工智能机器视觉的全角度成像及质量检测装置,包括:图像采集装置、支撑平台、控制柜;
4、其中,
5、图像采集装置是用来采集待检测线缆的图像用于缺陷分析的硬件装置。包括布置于线缆图像采集位置的360度环绕的面阵工业相机和工业镜头,工业相机的拍摄平面与线缆方向垂直。
6、图像采集装置为开合式设计,分为上半部分和下半部分,上半部分和下半部分可以以一侧为轴自动打开,方便设备上线。图像采集装置两侧各开一圆孔,开孔的上下半圆分别位于图像采集上半部分和下半部分。
7、工业相机及镜头通过伺服电机、丝杆及机械结构,控制其向线缆方向前进或后退,调整工业相机及镜头的工作距离,保证能够拍摄到合适大小的视野和清晰的图像。
8、采用环形led光源沿线缆方向垂直布置,线缆穿过环形光源,保证线缆表面的打光均匀。环形光源设计为两个半圆形环形光源,使得环形光源可从侧面开合,保障线缆能够从光源侧面进入。环形led光源采用固定装置固定在滑轨上,通过滑轨可调节led环形光源的间距,以保证不同直径的线缆的打光效果,保证最优的打光效果。
9、工业相机和定制环形led光源通过机械结构件固定,外部设有一个遮光罩,主要目的是防止内部固定工业相机、光源的结构件影响工业相机的拍摄效果。
10、遮光罩两侧沿线缆方向设置圆形开孔,开孔大小应设置合适大小,保障不剐蹭线缆。
11、遮光罩设计为可伸缩结构,由两部分组成,中间部分为圆筒形结构,以圆筒切面的圆作为基准,分为上下两个部分,上半部分固定在遮光壳体的上部,下半部分固定在遮光壳体的下半部分。遮光罩两侧各设置一个直径较中间部分略大的圆筒形结构,其直径恰好将遮光罩中间部分套住,且没有留有缝隙。当遮光罩伸缩过程中,中间部分并不移动,仅是遮光罩两侧部分移动。
12、每个环形光源的上下两个半圆,分别通过机械结构件固定于图像采集装置的上下两个部分,当遮光罩开合时,会同时带动定制环形led光源的上下两个半圆开合。
13、进一步的,
14、支撑平台,主要作用是支撑图像检测装置,并且在内部布设伺服电机和丝杆装置,一套用于驱动图像采集装置前后移动,一套用于驱动图像采集装置自动上下移动。
15、所述支撑平台内部沿线缆垂直的方向,分为两个部分,一部分用于布设支撑图像采集装置横向移动的丝杆、伺服电机及图像采集装置上下移动的丝杆及伺服电机;一部分用于布设plc控制器、电气装置。为了尽量缩小图像采集装置的大小,支撑平台上部中间沿线缆垂直方向设计一个凹槽,给予工业相机后部一定的空间,以更好的降低图像采集装置的高度,使得整个装置更加小巧。
16、所述控制柜,内部主要布设工控机、光源的控制器,控制柜位于支撑平台的一侧。一种较佳的实施方式是,控制柜上部设计为斜面结构,斜面是布置触摸屏显示器,触摸屏显示器设置控制按钮,用于控制图像采集装置的自动升降、前后移动、开合、工业相机的自动前后移动及支撑导轮的自动上下移动。
17、斜面以下设置抽拉式键盘及鼠标托盘,在控制柜侧面后部安装显示器支架及显示器,控制柜上部安装1个声光报警器。
18、控制柜斜面和抽拉式键盘托以下内部空间布设工控机、光源控制器等,工控机用于部署人工智能机器视觉质检软件,光源控制器是控制环形led光源的装置。
19、所使用的控制软件主要控制设备中的伺服电机,驱动图像采集装置内部工业相机的自动前后移动、支撑导轮的自动上下移动、图像采集装置的自动前后移动、自动上下移动的控制程序。
20、本发明的有益效果是
21、1)图像采集装置的自动开合设计,支持线缆质量检测设备的随上随下,方面用户的使用。
22、2)图像采集装置支持自动上下移动,适应不同产线线缆的高度需求。
23、3)工业相机360度环绕设置,支持工业相机的自动前后移动,自动调整相机的焦距,从而保证不同直径的线缆都可以拍到清晰的图像。
24、4)支持工业相机自动前后移动、支撑导轮的自动上下升降、图像采集装置的自动升降和前后移动,自动化程度高,更加方便用户的使用。
技术特征:
1.基于人工智能机器视觉的线缆全角度成像及质量检测装置,其特征在于,
2.根据权利要求1所述的装置,其特征在于,
3.根据权利要求2所述的装置,其特征在于,
4.根据权利要求3所述的装置,其特征在于,
5.根据权利要求4所述的装置,其特征在于,
6.根据权利要求5所述的装置,其特征在于,
7.根据权利要求6所述的装置,其特征在于,
8.根据权利要求1所述的装置,其特征在于,
9.根据权利要求1所述的装置,其特征在于,
10.根据权利要求3所述的方法,其特征在于,
技术总结
本发明提供一种基于人工智能机器视觉的线缆全角度成像及质量检测装置,属于线缆表面缺陷检测设备领域,本发明包括:图像采集装置、支撑平台、控制柜及控制软件。图像采集装置内部部署定制的半圆形环形光源、环绕工业相机、遮光罩、支撑导轮;支撑平台是布置于图像采集装置的一个柜体,用于支撑图像采集装置的自动前后移动和升降;控制柜内部包括工控机、PLC控制器、电气装置、光源控制器;本发明大幅度的降低了人工检测带来的误差和漏检率,实现了检测全过程的人工智能替代,进而大幅提高产品质量及降低生产成本。
技术研发人员:朱宪,孙桂刚,李超,郭智勇
受保护的技术使用者:浪潮软件集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!