一种适用于智能家居的稳定测距方法、设备和介质与流程
本发明涉及镜柜,尤其涉及一种适用于智能家居的稳定测距方法、设备和介质。
背景技术:
1、毫米波雷达,是工作在毫米波波段(millimeter wave)探测的雷达。通常毫米波是指30~300ghz频域(波长为1~10mm)的。毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光电雷达的一些优点。随着毫米波雷达在智能家居的广泛应用,对其需求越来越多。
2、而现有常用的是基于红外的智能家居,红外检测区域窄,只能检测较小角度范围,无法实现宽角度范围内的检测、人员的精准定位以及微动检测。
3、针对上述的现有技术存在的问题设计一种适用于智能家居的稳定测距方法、设备和介质是本发明研究的目的。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种适用于智能家居的稳定测距方法。
2、为了实现上述的技术目的,本发明所采用的技术方案为:
3、本发明提供了一种适用于智能家居的稳定测距方法,包括如下步骤:
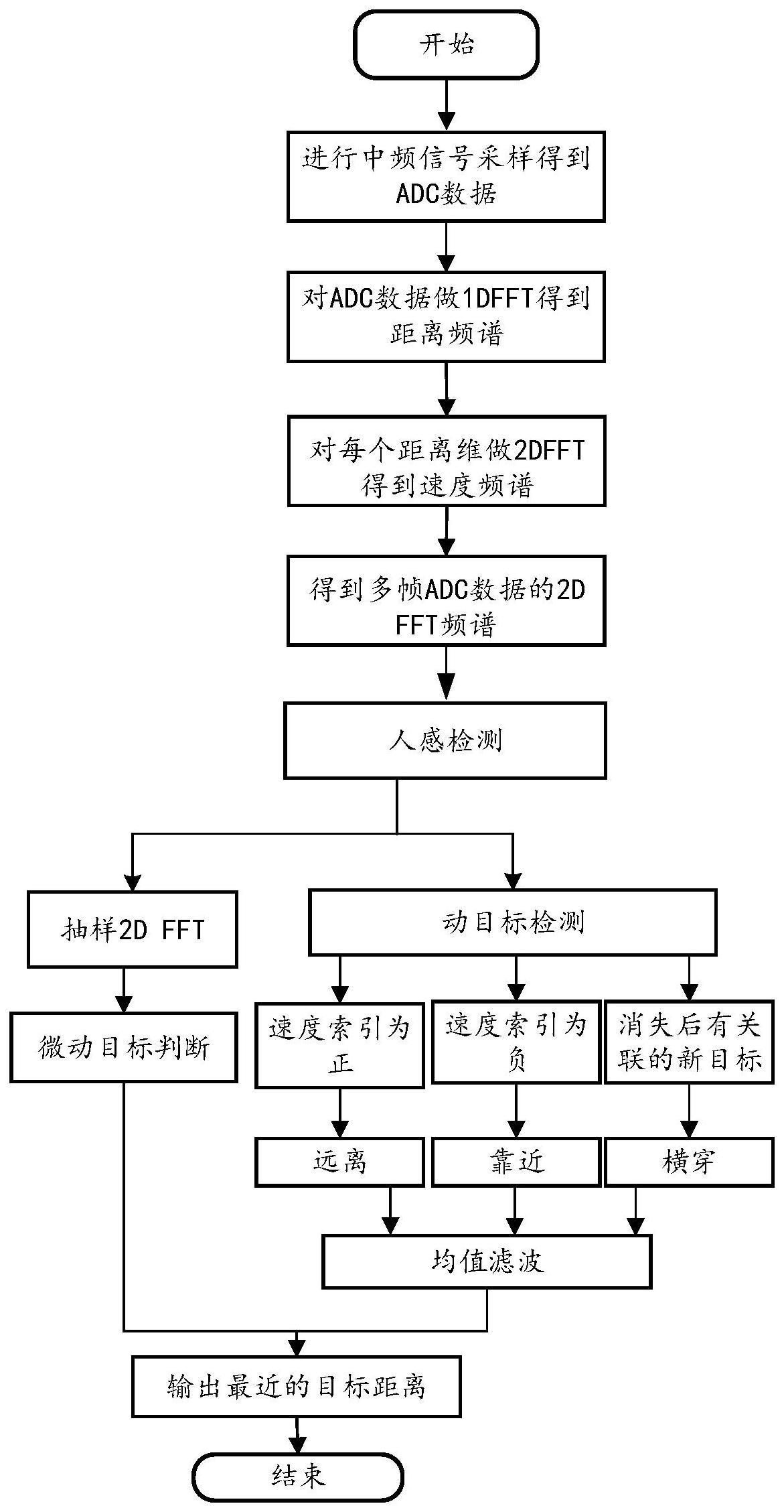
4、步骤1、雷达发射探测信号并接收目标反射的多帧adc数据,并获得多帧adc数据的2d fft频谱;
5、步骤2、进行人感检测;所述人感检测包括动目标检测和微动目标检测,所述动目标检测执行步骤3;所述微动目标检测执行步骤4;
6、步骤3、根据当前帧adc数据的2d fft频谱判断所述目标在第一设定时间内是否存在动目标;若是,则找出最靠近雷达的目标距离并进行滤波,进入步骤5;否则,结束流程;
7、步骤4、对多帧adc数据的2d fft频谱进行抽样得到抽样后2d fft频谱,根据抽样后2d fft频谱判断所述目标在第二设定时间内是否存在微动目标,若是,则找出最靠近雷达的目标距离并进行滤波,进入步骤5;否则,结束流程;
8、步骤5、输出滤波后的最靠近雷达的目标距离。
9、进一步的,所述步骤1具体包括:
10、步骤11、对雷达发射探测信号并接收目标反射的中频信号进行采样,得到adc数据;
11、步骤12、对所述adc数据进行m点fft运算作为1d fft,得到m/2个目标的距离频谱;其中,m表示采样数量;
12、步骤13、对每个距离维进行n点fft运算作为2d fft,得到n个目标的速度频谱和速度索引范围[-n/2,n/2],获得一帧adc数据的2d fft频谱;其中,n表示chirp数量;
13、步骤14、重复若干次步骤11-步骤13,得到多帧adc数据的2d fft频谱。
14、进一步的,所述步骤3中根据当前帧adc数据的2d fft频谱判断所述目标在第一设定时间内是否存在动目标,具体包括:
15、步骤31、从当前帧adc数据的2d fft频谱中的每个速度频谱上选取出最大值得到目标距离索引;
16、步骤32、若当前帧的所述目标距离索引中含有大于第一阈值的距离索引,则判定存在动目标。
17、进一步的,所述步骤3中找出最靠近雷达的目标距离并进行滤波,具体包括:
18、步骤33、将当前帧的所述目标距离索引中大于第一阈值的距离索引进行保存;
19、步骤34、将保存的距离索引按距离从小到大排序;
20、步骤35、将排序后的距离索引进行均值滤波处理:当动目标帧数大于预设帧数,如果在动目标帧数中有数据的个数大于或等于预设百分比,则进行均值滤波作为滤波后的目标距离,如果在动目标帧数中有数据的个数小于预设百分比,则不进行处理和输出。
21、进一步的,所述将排序后的距离索引进行均值滤波处理之后,还包括:
22、步骤36、当有一个新的动目标出现时,计算微动目标与动目标的距离差δd1;
23、步骤37、根据距离差△d1和误差d1判断新的动目标与微动目标的关联性,当微动目标与动目标的距离差△d1≤误差d1时,则认为是新的动目标与微动目标关联上,则微动目标不再进行输出;当微动目标与动目标的距离差△d1>误差d1时,则认为新的动目标与微动目标不是同一个目标,两个目标均要输出。
24、进一步的,所述步骤4中对多帧adc数据的2d fft频谱进行抽样得到抽样后2d fft频谱,根据抽样后2d fft频谱判断所述目标在第二设定时间内是否存在微动目标;具体包括:
25、步骤41、对每帧adc数据的2d fft频谱提取相同行的第n个chirp频谱得到抽样后2d fft频谱,n为整数且n的取值范围是0≤n≤n-1;
26、步骤42、多个所述抽样后2d fft频谱进行n点fft运算得到低速抽样频谱;
27、步骤43、若所述低速抽样频谱中含有大于第二阈值的谱线,则判定存在微动目标。
28、进一步的,所述步骤4中找出最靠近雷达的目标距离并进行滤波,具体包括:
29、步骤44、记录下每帧中最靠近雷达的目标距离;
30、步骤45、对微动目标的目标距离做滤波处理:计算前后两帧微动数据的距离差△d2,若距离差△d2>误差d2时,则最新的微动值作为滤波后的目标距离;若距离差△d2≤误差d2,则保持前面一帧的微动值作为滤波后的目标距离。
31、进一步的,所述步骤3中找出最靠近雷达的目标距离之后和进行滤波之前,还包括:
32、判断动目标的位置状态:
33、将每帧的所述目标距离索引中大于第一阈值的距离索引所对应的速度索引进行保存,根据保存的速度索引判断目标位于雷达的状态,若速度索引为正,则说明目标处于远离状态;若速度索引为负,则说明目标处于靠近状态;
34、当目标靠近雷达后出现消失现象时,开始计数;判断在第三设定时间内是否有出现一个在相同距离上相关联的新目标,若是,则记录为横穿,并记录下目标距离;若否,则不为横穿;其中,所述关联的判断方式为消失前的距离数据与重新进入的新目标的距离数据要一致并且没有检测到微动信号。
35、本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述的一种适用于智能家居的稳定测距方法。
36、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述的一种适用于智能家居的稳定测距方法。
37、采用上述的技术方案,本发明与现有技术相比,其具有的有益效果为:
38、1、高精度的测距:本发明采用的是毫米波雷达,毫米波雷达可以实现大角度范围的人员精准定位,具有厘米级的距离分辨率,动目标在距离上的变化实时响应,提高了距离测量的精度;
39、2、微动目标(人员站立)检测的稳定性高:获得实时的人感信息,人感检测包含两种状态:运动与微动,实现高精度的定位;高精度、稳定的定位,可以应用于任何测距的传感器上;例如在洗手间的镜子,前方有人化妆,属于微动,后面来人(横穿),前面目标不会丢失;
40、3、适用于多人的场景;
41、4、不需要做环境的自适应,任何环境下均适用;
42、5、不需要消耗过多的算力,节省内存。
- 还没有人留言评论。精彩留言会获得点赞!