视觉惯性里程计参数值更新方法、装置、设备及存储介质与流程
本技术涉及定位,尤其涉及一种视觉惯性里程计参数值更新方法、装置、设备及存储介质。
背景技术:
1、视觉惯性里程计(visual-inertial odometry,vio)最主要的目的就是输出高精度的定位结果,因此,如何提升vio输出位姿的精度成为视觉slam(即时定位与地图构建,simultaneous localization and mapping)中最重要的问题。
2、相关技术中,在双目vio系统中,可以确定出设定参数例如特征点的逆深度值或深度值提供给后端进行位姿计算。其中逆深度是深度的倒数,是一个标量。以逆深度为例,某个特征点的逆深度主要是靠左右目图像帧的三角化来计算的,如果左目或者右目的位姿不准确,即会造成计算的逆深度存在较大的偏差,使得特征点的位置不准确,从而增大重投影误差,致使vio输出位姿的精度降低。
3、因此,如何给后端优化器提供更加准确的设定参数值例如逆深度值或深度值,以使其更接近真实值,从而提高vio输出位姿的精度,已成为本领域技术人员亟待解决的问题。
技术实现思路
1、为克服相关技术中存在的问题,本技术提供一种视觉惯性里程计参数值更新方法、装置、设备及存储介质,能够得到更准确的参数值,使得vio可以根据参数值输出更准确的位姿结果。
2、本技术第一方面提供一种视觉惯性里程计参数值更新方法,包括:
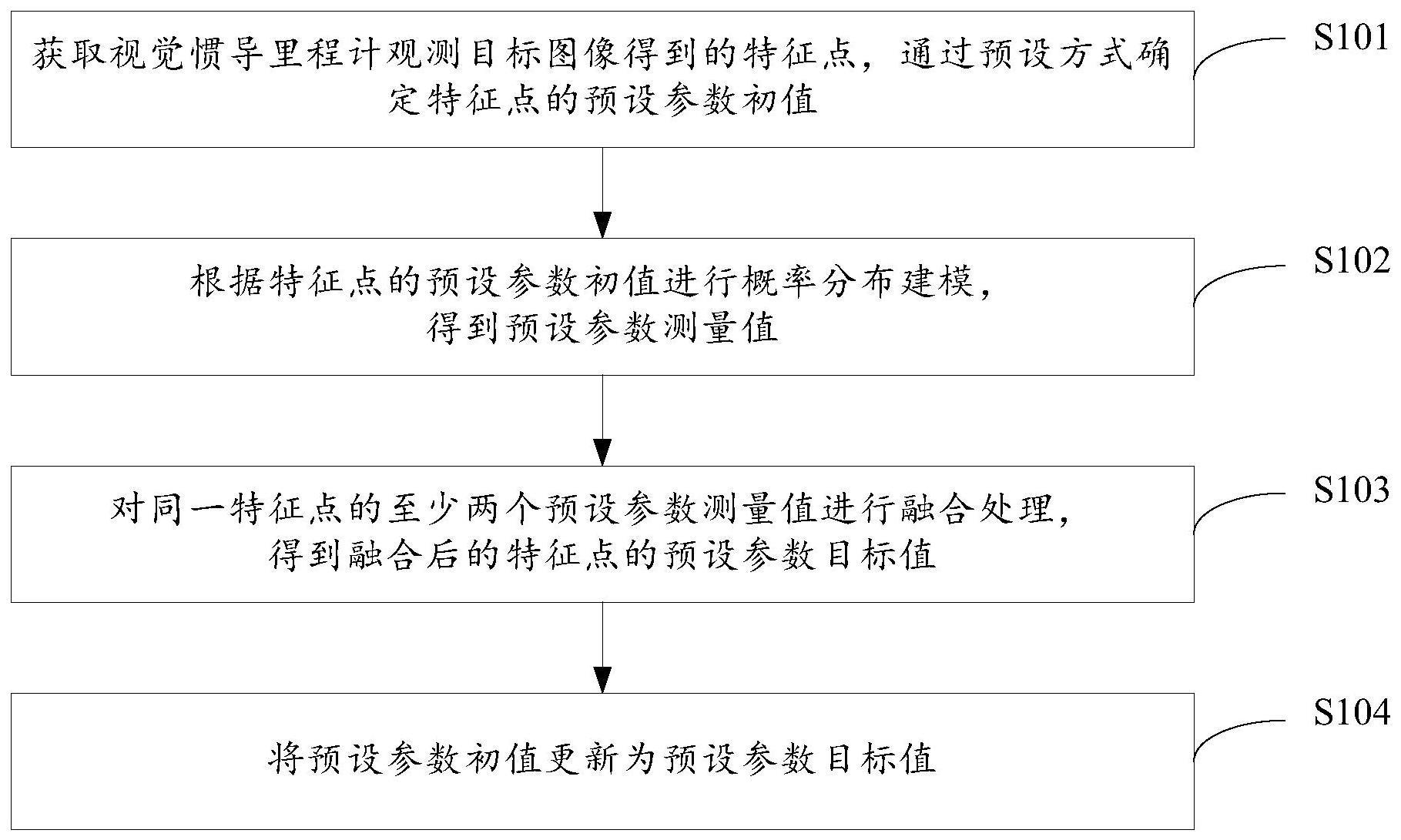
3、获取视觉惯导里程计观测目标图像得到的特征点,通过预设方式确定所述特征点的预设参数初值;
4、根据所述特征点的预设参数初值进行概率分布建模,得到预设参数测量值;
5、对同一特征点的至少两个预设参数测量值进行融合处理,得到融合后的所述特征点的预设参数目标值;
6、将所述预设参数初值更新为所述预设参数目标值。
7、在一实施方式中,所述通过预设方式确定所述特征点的预设参数初值,包括:
8、通过对所述特征点进行三角化处理,确定所述特征点的深度初值或逆深度初值,其中所述逆深度初值根据所述深度初值得到。
9、在一实施方式中,所述根据所述特征点的预设参数初值进行概率分布建模,得到预设参数测量值,包括:
10、根据所述特征点的逆深度初值进行概率分布建模,得到逆深度测量值;或,
11、根据所述特征点的深度初值进行概率分布建模,得到深度测量值。
12、在一实施方式中,所述根据所述特征点的逆深度初值进行概率分布建模,得到逆深度测量值,包括:
13、根据所述特征点的深度初值确定所述特征点的逆深度均值和逆深度方差;
14、利用所述逆深度均值和逆深度方差确定概率分布函数值作为逆深度测量值;或,
15、所述根据所述特征点的深度初值进行概率分布建模,得到深度测量值,包括:
16、根据所述特征点的深度初值确定所述特征点的深度均值和深度方差;
17、利用所述深度均值和深度方差确定概率分布函数值作为深度测量值。
18、在一实施方式中,所述根据所述特征点的逆深度初值进行概率分布建模,得到逆深度测量值,包括:
19、遍历所述目标图像中观测到所述特征点的关键帧,根据所述特征点的逆深度初值进行概率分布建模,得到逆深度测量值;或,
20、所述根据所述特征点的深度初值进行概率分布建模,得到深度测量值,包括:
21、遍历所述目标图像中观测到所述特征点的关键帧,根据所述特征点的深度初值进行概率分布建模,得到深度测量值。
22、在一实施方式中,所述遍历所述目标图像中观测到所述特征点的关键帧,根据所述特征点的逆深度初值进行概率分布建模,得到逆深度测量值,包括:
23、遍历所述目标图像中观测到所述特征点的关键帧,
24、在当前关键帧为观测到所述特征点的起始帧时,根据同一当前关键帧的左目图像位姿和右目图像位姿中特征点的逆深度初值进行概率分布建模,得到逆深度测量值;或,
25、在当前关键帧为观测到所述特征点的非起始帧时,根据起始帧的左目图像位姿和当前关键帧的左目图像位姿中特征点的逆深度初值进行概率分布建模,得到逆深度测量值。
26、在一实施方式中,所述遍历所述目标图像中观测到所述特征点的关键帧,根据所述特征点的深度初值进行概率分布建模,得到深度测量值,包括:
27、遍历所述目标图像中观测到所述特征点的关键帧,
28、在当前关键帧为观测到所述特征点的起始帧时,根据同一当前关键帧的左目图像位姿和右目图像位姿中特征点的深度初值进行概率分布建模,得到深度测量值;或,
29、在当前关键帧为观测到所述特征点的非起始帧时,根据起始帧的左目图像位姿和当前关键帧的左目图像位姿中特征点的深度初值进行概率分布建模,得到深度测量值。
30、在一实施方式中,所述根据所述特征点的预设参数初值进行概率分布建模,得到预设参数测量值,包括:
31、在所述特征点被观测到的次数大于预设阈值时,根据所述特征点的预设参数初值进行概率分布建模,得到预设参数测量值。
32、在一实施方式中,所述概率分布建模包括高斯分布建模或高斯-均匀混合分布模型建模。
33、本技术第二方面提供一种视觉惯性里程计参数值更新装置,包括:
34、初值模块,用于获取视觉惯导里程计观测目标图像得到的特征点,通过预设方式确定所述特征点的预设参数初值;
35、建模模块,用于根据所述初值模块确定的所述特征点的预设参数初值进行概率分布建模,得到预设参数测量值;
36、融合模块,用于对所述建模模块得到的同一特征点的至少两个预设参数测量值进行融合处理,得到融合后的所述特征点的预设参数目标值;
37、更新模块,用于将所述初值模块确定的预设参数初值更新为所述融合模块得到的预设参数目标值。
38、本技术第三方面提供一种电子设备,包括:
39、处理器;以及
40、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
41、本技术第四方面提供一种非暂时性机器可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
42、本技术提供的技术方案可以包括以下有益效果:
43、本技术提供的方案,在通过预设方式确定所述特征点的预设参数初值之后,再根据所述特征点的预设参数初值进行概率分布建模,得到预设参数测量值;对同一特征点的至少两个预设参数测量值进行融合处理,得到融合后的所述特征点的预设参数目标值;将所述预设参数初值更新为所述预设参数目标值。可见,通过根据所述特征点的预设参数初值进行概率分布建模,利用概率分布函数得到预设参数测量值,并进一步进行融合处理,最终得到预设参数目标值作为更新的预设参数初值,使更新后的预设参数初值更加接近真实值,这样输入后端进行位姿优化的预设参数初值更加准确,那么后端优化输出的位姿也就更加准确,从而提升解算的位姿精度。
44、进一步的,本技术可以根据所述特征点的深度的深度初值进行概率分布建模,得到逆深度测量值或深度测量值。以预设参数为逆深度为例,通过将所述特征点的逆深度初值进行概率分布建模,利用概率分布函数得到逆深度测量值,并进一步进行融合处理,最终得到逆深度目标值作为更新的逆深度初值,可以使更新后的逆深度初值更加接近真实值,这样输入后端进行位姿优化的逆深度初值更加准确,那么后端优化输出的位姿也就更加准确,从而提升解算的位姿精度。
45、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!