用于机器人的可伸展硅纳米柔性皮肤及其制备方法与流程
本发明涉及机器人皮肤,具体涉及一种用于机器人的可伸展硅纳米带柔性皮肤及其制备方法。
背景技术:
1、近年来,随着工业技术的发展,正在积极地开发工业机器人或医疗机器人作为代表人类执行工业或医疗用途所需的危险或微小任务的工具。这些机器人在开发的早期阶段被设计为重复执行简单的任务,但最近进化为配备人类的外表、思想或动作,以逐步执行更复杂的任务。一个智能机器人的形式在上述智能机器人的情况下,由于设计者实际上不可能输入能够应对所有外部情况的动作程序,因此通过使用类似的感知传感器来控制外部环境(或刺激)人的感觉器官,需要能够识别、判断,并据此采取必要的行动。与这种智能机器人相关的最重要的技术之一是与能够检测与智能机器人接触的外部负载的大小和接触位置的触觉传感器或接触传感器相关的技术。压力、温度和湿度传感的异质集成与特定部位几何布局中的电阻热致动相结合,为机器人柔性皮肤技术提供了显着进步的机会。
技术实现思路
1、本发明的目的是一种用于机器人的可伸展硅纳米带柔性皮肤及其制备方法,可伸展硅纳米带柔性皮肤具有优异的灵敏度,从而显着提高了人造皮肤对各种外部环境和刺激的响应能力。
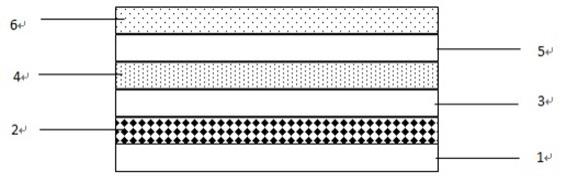
2、为了实现上述目的,本发明采用的技术方案如下:一种用于机器人的可伸展硅纳米柔性皮肤,包括由底层至顶层依次叠加封装的第一封装层、加热器层、第二封装层、第一传感器阵列层、第三封装层及第二传感器阵列层。
3、其中,所述第一封装层、第二封装层、第三封装层可以是硅橡胶,例如聚二甲基硅氧烷(pdms)。例如,硅橡胶可以是环氧树脂或硅酮。此外,第一封装层、第二封装层、第三封装层的厚度可以为10μm至100μm。
4、其中,所述加热器层可以由银金属电极制成,或者由银纳米线制成的柔性电极制成。
5、其中,所述第一传感器阵列层选自应变传感器、压力传感器和温度传感器中的至少一个组成。
6、其中,所述应变传感器为1μm厚的聚酰亚胺层,将p型掺杂硅纳米带的上部和下部分别封装制成,可以测量由硅纳米带的压阻特性施加的应变。所述压力传感器为1μm厚的聚酰亚胺层,将p型掺杂硅纳米带上部封装制成,硅纳米带的压电电阻特性为可以测量施加的压力。所述温度传感器为聚酰亚胺层,将pn型掺杂的硅纳米带的上下部分包覆形成,pn外部温度可根据掺杂硅纳米带的二极管的温度特性来测量。
7、其中,所述第二传感器阵列层由湿度传感器阵列形成。所述湿度传感器的结构是将图案化的金属线封装为厚度为1μm的聚酰亚胺层,聚酰亚胺层与金属之间形成电容。检测外部湿度的变化。
8、本发明还提供一种用于机器人的可伸展硅纳米带柔性皮肤的制备方法,包括以下步骤:
9、步骤1、将聚酰亚胺以8000rpm旋涂在氧化硅晶片上60s;
10、步骤2、将掺杂的硅纳米膜(sinm)旋涂在晶片上,在250℃下固化1小时以形成聚酰亚胺层;
11、步骤3、使用光刻工艺将掺杂的硅纳米膜(sinm)图案化,形成硅纳米带(sinr);
12、步骤4、采用真空热蒸镀法沉积厚度约为100μm的金属,并通过光刻工艺和湿蚀刻工艺对金属进行构图;
13、步骤5、使用步骤1中的方法,以8000rpm旋涂聚酰胺酸60s,并在250℃下固化约1小时形成聚酰亚胺封装层;
14、步骤6、通过光刻工艺和反应离子蚀刻工艺来蚀刻聚酰亚胺;
15、步骤7、使用离水胶带(water release tape)的转移印刷技术将从氧化硅晶片上取下的装置,转移到涂有 pdms 的聚乙烯醇树脂(pva)膜上;
16、步骤8、将pdms通过以3000rpm的旋涂方式进行封装30s。
17、本发明的有益效果:提供了一种用于机器人的可伸展硅纳米带柔性皮肤具有优异的灵敏度,从而显着提高了人造皮肤对各种外部环境和刺激的响应能力。
技术特征:
1.一种用于机器人的可伸展硅纳米柔性皮肤,其特征在于,包括由底层至顶层依次叠加封装的第一封装层(1)、加热器层(2)、第二封装层(3)、第一传感器阵列层(4)、第三封装层(5)及第二传感器阵列层(6),所述第一封装层(1)、第二封装层(3)、第三封装层(5)由聚二甲基硅氧烷、环氧树脂和硅酮组成,其厚度为10微米至100微米;所述加热器层(2)由银、银纳米线和碳纳米管材料制成;所述第一传感器阵列层(4)由应变传感器、压力传感器和温度传感器中的至少一个阵列组成;所述第二传感器阵列层(6)由湿度传感器阵列形成。
2.根据权利要求1所述的一种用于机器人的可伸展硅纳米带柔性皮肤的制备方法,其特征在于,包括以下步骤:
技术总结
本发明提供了一种用于机器人的可伸展硅纳米带柔性皮肤,包括由底层至顶层依次叠加封装的第一封装层、加热器层、第二封装层、第一传感器阵列层、第三封装层及第二传感器阵列层,并提供了该可伸展硅纳米带柔性皮肤的制备方法,制备的可伸展硅纳米带柔性皮肤具有优异的灵敏度,从而显着提高了人造皮肤对各种外部环境和刺激的响应能力。
技术研发人员:杨剑乐,张三,贺宁,何志仙
受保护的技术使用者:陕西中建建乐智能机器人股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!