双线隧道衬砌隐伏病害远距离快速实时普查方法及系统与流程
本发明涉及双线隧道检测领域,具体涉及双线隧道衬砌隐伏病害远距离快速实时普查方法及系统。
背景技术:
1、随着我国隧道大规模的兴建,运营隧道数量逐年增多,隧道质量问题愈发凸显。衬砌作为隧道的重要组成部分,在日常使用过程中,由于隧道结构的外部环境改变以及结构自身材料的性能逐渐弱化容易产生隐伏病害,隧道衬砌结构的快速普查成为当前亟需解决的问题。
2、目前,采用车载探地雷达检测技术利用电磁波脉冲在隧道衬砌结构中的传播原理,对混凝土衬砌与围岩结合部出现的脱空、回填欠实、富水区圈定、衬砌厚度等进行无损检测,及时发现问题。但是,传统的雷达检测方法需要由专业技术人员完成雷达探测数据的采集,以及后期需要对原始数据进行逐条处理分析,数据分析任务较重、周期较长,对于待测区段长度较长的隧道的检测需要大量人力物力,识别效率较低。传统隧道人工检测方式利用液压系统支撑探地雷达天线紧贴隧道壁方式检测,存在隧道设备结构阻挡而使检测速度降低的缺点。
3、专利号为cn202020288729.4的一种地质雷达检测隧道衬砌背后病害模型试验装置利用紧贴隧道衬砌内侧的滑动支架承载雷达进行数据采集,代替人工操作,减少了人力成本。但并没有涉及对收集到的数据进行实时分析和处理。
技术实现思路
1、本发明的目的在于克服现有技术中检测隧道衬砌隐伏病害时人工成本高、检测效率较低的技术问题,提供了双线隧道衬砌隐伏病害远距离快速实时普查方法及系统。
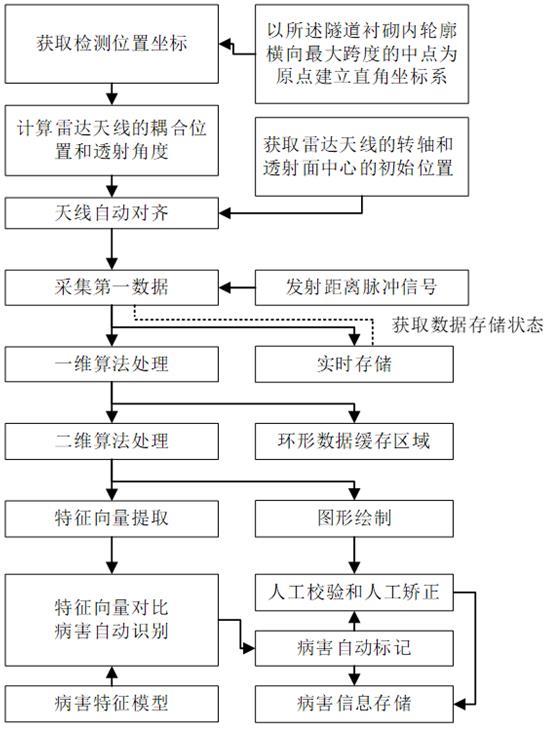
2、根据本发明第一方面,本发明请求保护双线隧道衬砌隐伏病害远距离快速实时普查方法,包括:
3、对拟测区段的隧道衬砌表面发送脉冲信号,并获取第一数据,其中,所述第一数据为所述脉冲信号经过反射后,信号接收装置获取的信号数据;
4、对所述第一数据进行数据预处理,得到第二数据;
5、获取所述第二数据的特征向量,其中,所述特征向量为所述第二数据的二维信号特征,包括振幅、相位和同相轴;
6、将所述第二数据的所述特征向量与病害特征模型进行对比,根据对比结果判断所述第二数据中是否存在病害区域,其中,所述病害区域为所述脉冲信号经过所述隧道衬砌中可能造成安全隐患的区域反射后出现异常的所述特征向量的数据区域,当所述第二数据中存在所述病害区域时,对所述病害区域进行标记。
7、在本技术一实施例中,对所述拟测区段的所述隧道衬砌表面发送所述脉冲信号之前,所述方法还包括通过位姿调整模型实现雷达天线的透射面与所述隧道衬砌表面的自动对齐,所述位姿调整模型的建立方法如下:
8、根据隧道衬砌的断面设计图建立坐标系;
9、获取所述隧道衬砌表面的检测位置,得到第一坐标;
10、根据所述第一坐标得到所述雷达天线的耦合位置及透射角度;
11、获取所述雷达天线的转轴的实时位置,得到第二坐标,其中,所述转轴为所述雷达天线在调整透射角度时转动所围绕的中心轴;
12、获取所述雷达天线的所述透射面中心的位置,得到第三坐标;
13、根据所述耦合位置和所述透射角度调整所述第二坐标和所述第三坐标。
14、在本技术一实施例中,根据所述耦合位置和所述透射角度调整所述第二坐标和所述第三坐标,还包括:
15、以所述转轴为极点建立极坐标系;
16、根据所述第二坐标和所述第三坐标的相对位置,获取所述第三坐标在所述极坐标系中的位置,得到第四坐标;
17、根据所述透射角度调整所述第四坐标。
18、在本技术一实施例中,对所述第一数据进行数据预处理,所述数据预处理还包括对所述第一数据在数据缓存区域采用fifo环形缓存的方式进行数据缓存,其中,所述数据缓存区域用于对所述第一区域进行缓存。
19、在本技术一实施例中,对所述第一数据在所述数据缓存区域采用fifo环形缓存的方式进行数据缓存的步骤之前,所述方法还包括:
20、获取所述数据缓存区域的数据存储状态,所述数据存储状态用于判断所述数据缓存区域是否正在执行数据存储任务,当所述数据缓存区域正在执行数据存储任务时,创建新的存储线程,所述存储线程用于对所述第一数据进行数据缓存,当所述数据缓存区域没有正在执行的数据存储任务时,所述数据缓存区域直接对所述第一数据进行存储。
21、在本技术一实施例中,对所述拟测区段的所述隧道衬砌表面发送所述脉冲信号,所述方法还包括所述脉冲信号为距离脉冲信号,所述距离脉冲信号为在连续采集过程中,按照预设间隔距离发射所述脉冲信号。
22、在本技术一实施例中,所述病害特征模型的建立方法如下:
23、采集常见隧道衬砌隐伏病害的所述第一数据,并对所述第一数据进行人工分类和标注,得到对应的病害类别标签;
24、对所述第一数据进行数据预处理后,得到所述第二数据;
25、获取所述第二数据的所述特征向量,分析所述病害类别标签与所述特征向量之间的联系,得到各个所述病害类别标签对应的分类依据;
26、整合所有所述病害类别标签和所述分类依据,得到所述病害特征模型。
27、在本技术一实施例中,对所述病害区域进行标记之后,所述方法还包括对所述对比结果和所述病害区域进行人工校验,当人工校验的结果与所述对比结果和/或所述病害区域不一致时,采用人工干预的方式进行矫正,并将矫正后的所述对比结果和/所述病害区域反馈给所述病害特征模型。
28、根据本发明第二方面,本发明请求保护双线隧道衬砌隐伏病害远距离快速实时普查系统,包括:
29、数据采集模块,用于对拟测区段的隧道衬砌表面发送脉冲信号,并获取第一数据,其中,所述第一数据为所述脉冲信号经过反射后,信号接收装置获取的信号数据;
30、数据预处理模块,用于对所述第一数据进行数据预处理,得到第二数据;
31、特征识别模块,用于获取所述第二数据的特征向量,其中,所述特征向量为所述第二数据的二维信号特征,包括振幅、相位和同相轴;将所述第二数据的所述特征向量与病害特征模型进行对比,根据对比结果判断所述第二数据中是否存在病害区域,其中,所述病害区域为所述脉冲信号经过所述隧道衬砌中可能造成安全隐患的区域反射后出现异常的所述特征向量的数据区域,当所述第二数据中存在所述病害区域时,对所述病害区域进行标记。
32、在本技术一实施例中,所述系统还包括天线位姿调整模块,所述天线位姿调整模块包括若干个纵臂、横臂和若干个雷达天线,相邻两个所述纵臂之间活动连接,使所述纵臂可产生纵向的位移,所有所述纵臂形成纵臂组,所述纵臂组的一端与检测车可分离连接,另一端与所述横臂的一端通过第一转动部件活动连接,所述第一转动部件用于调整所述横臂和所述纵臂之间的角度,所述纵臂组中还设置有传动装置,所述传动装置使若干个所述纵臂同速升降,若干个所述雷达天线通过第二转动部件与所述纵臂和所述横臂活动连接,所述第二转动部件用于改变所述雷达天线与所述纵臂或所述横臂之间的角度。
33、在本技术一实施例中,对所述拟测区段的所述隧道衬砌表面发送所述脉冲信号之前,所述系统还包括通过位姿调整模型实现雷达天线的透射面与所述隧道衬砌表面的自动对齐,所述位姿调整模型包括如下:
34、根据隧道衬砌的断面设计图建立坐标系;
35、获取所述隧道衬砌表面的检测位置,得到第一坐标;
36、根据所述第一坐标得到所述雷达天线的耦合位置及透射角度;
37、获取所述雷达天线的转轴的实时位置,得到第二坐标,其中,所述转轴为所述雷达天线在调整透射角度时转动所围绕的中心轴;
38、获取所述雷达天线的所述透射面中心的位置,得到第三坐标;
39、根据所述耦合位置和所述透射角度调整所述第二坐标和所述第三坐标。
40、在本技术一实施例中,根据所述耦合位置和所述透射角度调整所述第二坐标和所述第三坐标,还包括:
41、以所述转轴为极点建立极坐标系;
42、根据所述第二坐标和所述第三坐标的相对位置,获取所述第三坐标在所述极坐标系中的位置,得到第四坐标;
43、根据所述透射角度调整所述第四坐标。
44、在本技术一实施例中,对所述第一数据进行数据预处理,所述数据预处理还包括对所述第一数据在数据缓存区域采用fifo环形缓存的方式进行数据缓存,其中,所述数据缓存区域用于对所述第一区域进行缓存。
45、在本技术一实施例中,对所述第一数据在所述数据缓存区域采用fifo环形缓存的方式进行数据缓存的步骤之前,所述系统还包括:
46、获取所述数据缓存区域的数据存储状态,所述数据存储状态用于判断所述数据缓存区域是否正在执行数据存储任务,当所述数据缓存区域正在执行数据存储任务时,创建新的存储线程,所述存储线程用于对所述第一数据进行数据缓存,当所述数据缓存区域没有正在执行的数据存储任务时,所述数据缓存区域直接对所述第一数据进行存储。
47、在本技术一实施例中,对所述拟测区段的所述隧道衬砌表面发送所述脉冲信号,所述系统还包括所述脉冲信号为距离脉冲信号,所述距离脉冲信号为在连续采集过程中,按照预设间隔距离发射所述脉冲信号。
48、在本技术一实施例中,所述病害特征模型的建立包括如下:
49、采集常见隧道衬砌隐伏病害的所述第一数据,并对所述第一数据进行人工分类和标注,得到对应的病害类别标签;
50、对所述第一数据进行数据预处理后,得到所述第二数据;
51、获取所述第二数据的所述特征向量,分析所述病害类别标签与所述特征向量之间的联系,得到各个所述病害类别标签对应的分类依据;
52、整合所有所述病害类别标签和所述分类依据,得到所述病害特征模型。
53、在本技术一实施例中,对所述病害区域进行标记之后,所述系统还包括对所述对比结果和所述病害区域进行人工校验,当人工校验的结果与所述对比结果和/或所述病害区域不一致时,采用人工干预的方式进行矫正,并将矫正后的所述对比结果和/所述病害区域反馈给所述病害特征模型。
54、与现有技术相比,本发明的有益效果:
55、1、通过所述数据预处理实现所述第一数据的滤波和增强信号特征,抑制所述干扰噪声数据和随机噪声的影响,最大限度的提高雷达信号特征的分辨能力,凸显雷达数据中的病害特征,去除接触网及吊柱的干扰,提高了后续信号特征提取的识别准确率。通过对病害区域的自动识别和标记能够快速对隧道衬砌进行检测,实现铁路隧道病害的数据的快速采集,减少专业技术人员对雷达数据分析排查的工作量,提高检测效率的同时降低了人工工作量。
56、2、采用位姿调整模型实现雷达天线的透射面与所述隧道衬砌表面的自动对齐能够与不同类型的雷达探测装置搭配使用,根据不同类型雷达的使用方法匹配该雷达的最佳耦合位置和最佳投射角度。
57、3、采用fifo环形缓存的方式对所述第一数据进行缓存,有利于避免计算机资源泄露。
58、4、在实际应用场景中,对所述隧道衬砌表面通常需要进行多次连续测量,获取所述第一数据后,获取当前所述数据缓存区域的数据存储状态,即、判断所述数据缓存区域是否已经完成对上一条雷达探测数据的存储,避免了数据存储速度与数据采集速度之间的差异导致数据丢失或数据不完整等情况的出现,同时减少存储速度对数据采集速度的影响。
59、5、多线程存储的方式能够更好地适配同时对多条所述第一数据进行采集,进一步提高普查效率。
60、6、根据预先设定的间隔距离沿着测线连续发射多个所述脉冲信号,一方面可以降低检测车运行速度对所述第一数据影响,另一方面可以根据所述间隔距离、测线和数据采集次数,快速定位病害区域在所述待测区段的位置,消除了检测前期由于人工标记检测里程所产生的工作量,进一步提高检测自动化程度。
61、7、利用图像数据,对所述病害区域进行人工校验,并将所述人工校验的结果反馈给所述病害特征模型,提高了对所述隧道衬砌表面的识别准确度。
62、8、在数据采集之前,通过所述人工干预对所述病害特征模型进行修改或添加,实现了适应不同的应用场景。
63、9、对所述雷达天线进行不同自由度的调节,实现所述透射面与所述隧道衬砌表面的自动对齐,实现了所述雷达天线对所述隧道衬砌曲面的自适应,进一步扩大了所述雷达天线的位姿调整范围。
64、10、通过升降调节、角度调节将雷达天线固定于指定位置,能够实现雷达天线在车辆限界内的快速检测,同时又能在重点区段进行精检,对疑似病害进行多角度全面的数据采集和检测。
65、11、可以根据实际适用场景,可以选择在检测车上同时安装2个所述天线位姿调整模块,同时对多条侧线进行同步检测,实现隧道拱顶、拱腰、边墙全断面检测。
66、12、利用所述纵臂个数的增加或减少,适应不同大小的隧道断面。
67、13、所述天线位姿调整模块也可直接应用和搭载在公路或者铁路平板车,作为公路或铁路隧道检测设备的关键装置集成形成综合检测车,拓展了所述天线位姿调整模块的应用场景。
- 还没有人留言评论。精彩留言会获得点赞!