一种电推力器推力矢量的直接测量方法
本发明涉及电推进,且具体地涉及一种电推力器推力矢量的直接测量方法。
背景技术:
1、空间电推进技术作为一种先进的推进技术,具有比冲高、推力小、成本低等特点,可以实现航天器的姿态控制、轨道转移、南北位置保持、重定位等需求,近年来在航天器上得到了广泛的应用。
2、电推力器在工作中会产生非轴向的推力矢量,这是一个不可预测且无法避免的重要参数。推力矢量的来源有几个方面:气体分配器产生的气体分布不均、电推力器磁场的不对称性、空心阴极或中和器导致电推力器的非中心对称结构、加速栅极安装误差等。推力矢量的大小是电推力器设计过程中的一项重要指标,若超出标准将导致电推力器无法正常工作,因此测量电推力器推力矢量的大小对于电推力器的设计、研制具有重要意义。
3、现有的电推力器推力矢量的主流测量方法为等离子体探针阵列法,该方法采用法拉第探针阵列测量电推力器的羽流偏转角,但该方法是一种间接测量方法,无法直接测得电推力器的推力矢量。除此之外,光学测量方法和二维双摆推力架方法也曾被用于推力矢量测量,但各有缺点:前者属于间接测量方法无法直接测量;后者的装置过于复杂,对于传统研究人员使用难度较大。因此,亟需设计一种简单、可靠的电推力器推力矢量直接测量方法,具有现实意义和良好应用前景。
技术实现思路
1、针对上述不足,本发明提供了一种电推力器推力矢量的直接测量方法,用以简单、可靠地对电推力器的推力矢量进行直接测量。
2、为实现上述目的,本发明包括如下步骤:
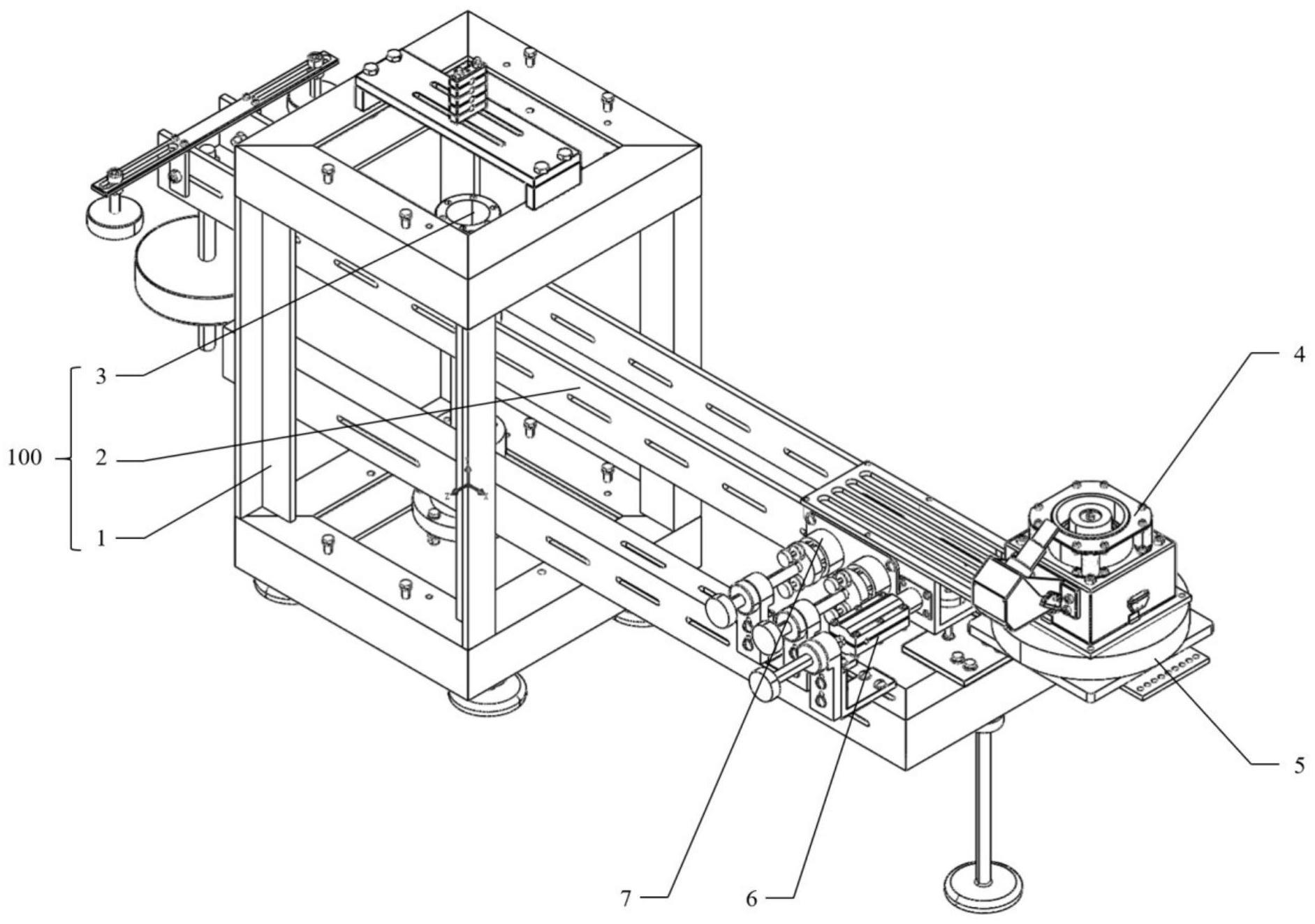
3、s1:将扭摆式推力架安装在真空实验系统内,在扭摆式推力架上安装电动旋转台,将电推力器安装在电动旋转台上;
4、s2:利用位移传感器测量扭摆式推力架扭摆的偏转位移,计算得到扭摆的旋转角度;
5、s3:利用标定装置标定校准推力架所受推力和由推力所产生的扭摆偏转位移的关系;
6、s4:安装完毕扭摆式推力架、电推力器、位移传感器后,启动真空试验系统进行抽真空,抽真空完成后进行电推力器点火;
7、s5:电推力器工作中所产生的推力矢量导致扭摆偏转,采集扭摆式推力架偏转稳定后的位移传感器输出信号;
8、s6:通过电动旋转台控制电推力器旋转至相对初始安装位置的不同角度,每一个角度所对应的是一个测量工况,在每个测量工况下采集扭摆式推力架偏转稳定后的位移传感器输出信号。
9、s7:利用所采集到的不同工况下的位移传感器输出信号进行计算,得到电推力器工作过程中所产生的推力矢量数值。
10、在一种可能的实现方式中,在本发明提供的上述电推力器推力矢量的直接测量方法中,所述电动旋转台被水平安装在扭摆的末端。
11、在一种可能的实现方式中,在本发明提供的上述电推力器推力矢量的直接测量方法中,所述的电动旋转台被水平安装在扭摆的末端,其特征在于电动旋转台的转轴方向与扭摆式推力架的枢轴方向平行。
12、在一种可能的实现方式中,在本发明提供的上述电推力器推力矢量的直接测量方法中,所述电推力器水平同轴安装在电动旋转台上,电推力器的放电室对称轴与所述电动旋转台的转轴重合。
13、在一种可能的实现方式中,在本发明提供的上述电推力器推力矢量的直接测量方法中,所述扭摆旋转角度的计算方法为:δx为位移传感器测得的位移大小,rsensor为从位移传感器到推力架转轴的臂长距离,δx、rsensor可以通过测量得到,在小角度旋转的假设下,旋转角度ω、位移大小δx和臂长rsensor满足关系ω≈δx/rsensor,由此可以计算得到扭摆式推力架扭摆的旋转角度ω。
14、在一种可能的实现方式中,在本发明提供的上述电推力器推力矢量的直接测量方法中,所述静电梳装置通过施加电压可以产生静电力,在实验前经过精密电子天平校准得到所施加电压与产生微小静电力的的关系函数。
15、在一种可能的实现方式中,在本发明提供的上述电推力器推力矢量的直接测量方法中,所述推力矢量数值的计算方法为:
16、(1)令电推力器的推力矢量为fr,电推力器所产生的的滚动力矩为mtorque,扭摆式推力架弹性元件的回复力矩为m,三者满足受力平衡关系式:
17、fr·cosθ·r+mtorque=m
18、其中r是电推力器中心到推力架转轴的距离,θ是径向力fr和垂直于摆的方向在水平面上的夹角。
19、(2)选择所述步骤s6中不同角度的三个工况测量结果进行计算,代入方程组求解
20、fr·cosθ1·r+mtorque=m1
21、fr·cosθ2·r+mtorque=m2
22、fr·cosθ3·r+mtorque=m3
23、(3)通过求解方程组可以求解出未知量fr,即可实现对电推力器推力矢量的直接测量。
24、本发明提供的上述电推力器推力矢量直接测量方法,通过安装、标定校准、点火测量、数据处理等步骤实现了对电推力器推力矢量的直接测量。与现有技术相比,本技术有如下优点:(1)采用直接测量法,得到的结果更为直接有效,避免了间接方法中建立模型产生的误差;(2)测量精度高,采用高精度的扭摆式推力架和位移传感器,使用标定装置对系统进行标定,大大提高测量的精确性;(3)测量的操作步骤简单,容易被广大科研人员学习使用,具有较高的可推广性;(4)具有极高的普适性,可被应用于各种类型的电推力器的推力矢量测量。
技术特征:
1.一种电推力器推力矢量的直接测量方法,其特征在于,该方法包括如下步骤:
2.如权利要求1所述的电推力器推力矢量的直接测量方法,其特征在于,所述电动旋转台被水平安装在扭摆的末端。
3.如权利要求2所述的电动旋转台被水平安装在扭摆的末端,其特征在于电动旋转台的转轴方向与扭摆式推力架的枢轴方向平行。
4.如权利要求1所述的电推力器推力矢量的直接测量方法,其特征在于,所述电推力器水平同轴安装在电动旋转台上,电推力器的放电室对称轴与所述电动旋转台的转轴重合。
5.如权利要求1所述的电推力器推力矢量的直接测量方法,其特征在于,所述扭摆旋转角度的计算方法为:δx为位移传感器测得的位移大小,rsensor为从位移传感器到推力架转轴的臂长距离,δx、rsensor可以通过测量得到,在小角度旋转的假设下,旋转角度ω、位移大小δx和臂长rsensor满足关系ω≈δx/rsensor,由此可以计算得到扭摆式推力架扭摆的旋转角度ω。
6.如权利要求1所述的电推力器推力矢量的直接测量方法,其特征在于,所述静电梳装置通过施加电压可以产生静电力,在实验前经过精密电子天平校准得到所施加电压与产生微小静电力的的关系函数。
7.如权利要求1所述的电推力器推力矢量的直接测量方法,其特征在于,所述推力矢量数值的计算方法为:
技术总结
本发明提出了一种电推力器推力矢量的直接测量方法,该测量方法通过安装、标定校准、点火测量、数据处理等步骤实现了对电推力器推力矢量的直接测量,解决了原有测量方法不够直接或过于复杂的问题。该测量方法采用直接测量法,测量结果直接有效,避免了间接方法中的模型误差;测量精度高,采用高精度的扭摆式推力架和位移传感器,使用标定装置对系统进行标定,大大提高测量的精确性;测量的操作步骤简单,容易被广大科研人员学习使用,具有较高的可推广性。该测量方法可用于各种类型的电推力器推力矢量测量,可以检验电推力器能否满足卫星工作要求,对于电推力器的设计和制造具有重要意义。
技术研发人员:王一白,陈方鋆,张仲恺,张广川,任军学,汤海滨
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!