一种相控阵雷达大规模集群目标跟踪波束功率联合分配方法
本发明属于雷达,具体涉及一种相控阵雷达大规模集群目标跟踪波束功率联合分配方法。
背景技术:
1、相控阵雷达借助灵活的波束指向和捷变特性,可为空域搜索、目标跟踪等不同任务合理分配时间与能量资源,且其工作参数可控,因此在多目标跟踪中占据重要地位。
2、相控阵雷达有关资源不足时的资源分配算法,已有不少研究者提出了技术方案:王成伟等人在“基于多目标的雷达组网传感器资源管理算法[j].火力与指挥控制,2016,41(05):89-92.”中将跟踪目标个数和跟踪目标精度作为优化目标,首先按照设定的分配准则对传感器进行一次分配,最大化跟踪目标个数;然后利用一种基于传感器排序的启发式传感器分配方法进行二次分配,通过控制跟踪目标的协方差水平,使目标的跟踪精度尽量接近期望值。该算法能够在较短的时间内对多传感器进行快速地分配,在达到了期望目标的跟踪精度的前提下跟踪了更多的目标,并且在一定程度上控制资源消耗,减少系统的总耗能。该方法中每个雷达对目标进行跟踪的信息增益是离线计算的,不符合真实场景,并且其最终仿真场景中目标数量仅为4,雷达数量为10,并未体现出当目标数量过多导致雷达资源不足的情况。相控阵雷达资源不足会导致传统资源分配算法应用失效无法在规定时间将目标跟踪至所需精度。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种相控阵雷达大规模集群目标跟踪波束功率联合分配方法。本发明要解决的技术问题通过以下技术方案实现:
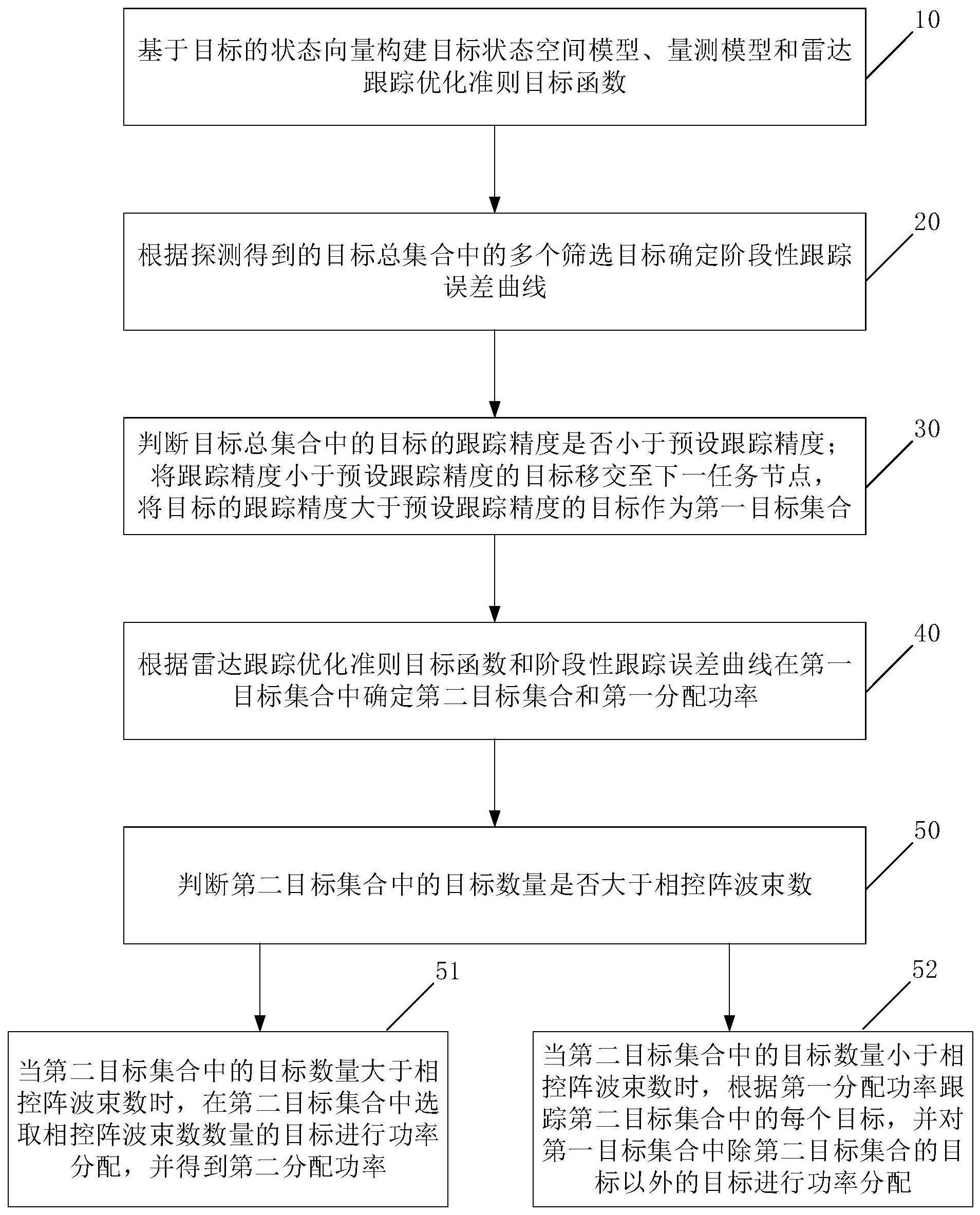
2、一种相控阵雷达大规模集群目标跟踪波束功率联合分配方法,包括以下步骤:
3、基于目标的状态向量构建目标状态空间模型、量测模型和雷达跟踪优化准则目标函数;
4、根据探测得到的目标总集合中的多个筛选目标确定阶段性跟踪误差曲线;所述阶段性跟踪误差曲线为在预设时间内的跟踪精度为预设跟踪精度的曲线;
5、将目标的跟踪精度大于所述预设跟踪精度的目标作为第一目标集合;
6、根据所述雷达跟踪优化准则目标函数和所述阶段性跟踪误差曲线在所述第一目标集合中确定第二目标集合和第一分配功率;
7、当所述第二目标集合中的目标数量大于相控阵波束数时,在所述第二目标集合中选取所述相控阵波束数数量的目标进行功率分配,并得到第二分配功率;
8、当所述第二目标集合中的目标数量小于相控阵波束数时,根据所述第一分配功率跟踪所述第二目标集合中的每个目标,并对所述第一目标集合中除所述第二目标集合的目标以外的目标进行功率分配。
9、在本发明的一个实施例中,所述基于目标的状态向量构建目标状态空间模型、量测模型和雷达跟踪优化准则目标函数,包括:
10、基于目标的状态向量构建目标运动状态方程;其中,所述目标运动状态方程和所述目标运动状态方程的协方差矩阵构成所述目标状态空间模型;
11、根据所述目标运动状态方程的观测函数和量测误差构建量测模型;
12、根据所述量测模型、所述目标运动状态方程的预测目标运动状态方程的预测协方差矩阵和雷达的发射信号功率构建所述雷达跟踪优化准则目标函数。
13、在本发明的一个实施例中,所述根据探测得到的目标总集合中的多个筛选目标确定阶段性跟踪误差曲线,包括:
14、在探测得到的目标总集合中选取与雷达的距离为预设距离的目标,作为所述筛选目标;
15、模拟根据预设雷达功率对所述筛选目标的跟踪,确定所述阶段性跟踪误差曲线。
16、在本发明的一个实施例中,所述方法还包括:
17、判断所述目标总集合中的目标的跟踪精度是否小于所述预设跟踪精度;
18、将跟踪精度小于所述预设跟踪精度的目标移交至下一任务节点。
19、在本发明的一个实施例中,所述根据所述雷达跟踪优化准则目标函数和所述阶段性跟踪误差曲线在所述第一目标集合中确定第二目标集合和第一分配功率,包括:
20、根据所述雷达跟踪优化准则目标函数和所述阶段性跟踪误差曲线构建第一功率分配数学模型;
21、对所述第一功率分配数学模型进行求解,得到第二目标集合和第一分配功率。
22、在本发明的一个实施例中,所述当所述第二目标集合中的目标数量大于相控阵波束数时,在所述第二目标集合中选取所述相控阵波束数数量的目标进行功率分配,并得到第二分配功率的具体步骤为:
23、当所述第二目标集合中的目标数量大于相控阵波束数时,在所述第二目标集合中选取威胁度与上一时刻跟踪精度乘积最大的前第一数量的目标进行功率分配,并得到第二分配功率;其中所述第一数量为相控阵波束数。
24、在本发明的一个实施例中,所述当所述第二目标集合中的目标数量小于相控阵波束数时,根据所述第一分配功率跟踪所述第二目标集合中的每个目标,并对所述第一目标集合中除所述第二目标集合的目标以外的目标进行功率分配,包括:
25、当所述第二目标集合中的目标数量小于相控阵波束数时,根据所述第一分配功率跟踪所述第二目标集合中的每个目标;
26、当所述第一目标集合中除所述第二目标集合的目标以外的目标数量大于所述相控阵波束数与所述第二目标集合的目标数量的差值时,从所述第一目标集合中除所述第二目标集合的目标以外的目标中选取威胁度最大的前第二数量的目标,并根据剩余功率进行功率分配;其中,所述第二数量为所述相控阵波束数与所述第二目标集合的目标数量的差值;所述剩余功率为总功率与所述第一分配功率的差;
27、当所述第一目标集合中除所述第二目标集合的目标以外的目标数量小于所述相控阵波束数与所述第二目标集合的目标数量的差值时,将所述第一目标集合中除所述第二目标集合的目标以外的目标根据所述剩余功率进行功率分配。
28、在本发明的一个实施例中,第k时刻所述目标的状态向量为
29、其中,所述目标匀速直线运动,q表示所述目标,(xq,k,yq,k)表示k时刻所述目标q的位置,表示k时刻所述目标q的速度;
30、所述目标运动状态方程的表达式为:
31、xq,k=fxq,k-1+μq,k-1;
32、其中,为状态转移矩阵,表示克罗内克积;i2表示2阶单位矩阵;μq,k-1表示均值为零的高斯过程白噪声,δt表示跟踪时间间隔;
33、所述目标运动状态方程的协方差矩阵qq,k-1为:
34、
35、其中,rq表示过程噪声强度。
36、在本发明的一个实施例中,所述量测模型的表达式为:
37、zq,k=hq,k(xq,k)+wq,k;
38、其中,hq,k(·)表示观测函数,hq,k(xq,k)=[rq,k θq,k fq,k]t,rq,k、θq,k和fq,k分别表示距离、方位角和多普勒量测,wq,k表示量测误差,服从零均值高斯分布;
39、所述量测模型的量测协方差矩阵rq,k为:
40、其中,和分别表示距离、方位角和俯仰角量测的估计方差,αq,k∝1/(rq,k)4表示路径衰落,|hq,k|2为目标rcs,bk,ek和tk分别表示发射信号的有效带宽、接收波束宽度和时宽。
41、在本发明的一个实施例中,所述雷达跟踪优化准则目标函数:
42、
43、其中,tr[·]表示矩阵求迹运算,表示目标跟踪误差协方差矩阵的后验克拉美罗下界,所述目标跟踪误差协方差矩阵的后验克拉美罗下界根据所述预测协方差矩阵和所述量测模型的量测协方差矩阵确定;pq,k表示雷达的发射信号功率,所述目标跟踪误差协方差矩阵通过所述量测模型对所述目标进行跟踪得到。
44、本发明的有益效果:
45、本发明将跟踪目标个数和跟踪目标精度作为优化目标,相控阵雷达波束与功率作为优化变量,在保持对特定空域地搜索探测能力的前提下,实现在系统资源不足的情况下,尽可能多、尽可能快地跟踪目标至指定精度,能够应用于协同探测场景中。本发明通过两次分配在相控阵资源不足的情况下,保证了尽可能快地跟踪更多的目标至指定精度。
46、以下将结合附图及实施例对本发明做进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!