一种应用于空间网络结构中的无人机激光惯性里程计方法
本发明涉及一种应用于空间网络结构中的无人机激光惯性里程计方法,属于导航。
背景技术:
1、基于特征的激光惯性里程计凭借快速、准确的位姿估计被广泛用于gnss拒止环境中无人机的导航。
2、基于激光雷达的无人机自主导航方案的核心问题是激光雷达点云配准,即从激光雷达两帧点云的变化中获得相对位姿,一个典型的方法是迭代最近点法(itetativeclosest points,icp)。迭代最近点法一般分为两个步骤,第一步计算两次扫描之间点的匹配关系,第二步计算最优的转移矩阵使匹配点之间距离的代价函数最小。但是,当点云稀疏时,无法找到精确的匹配点;当点云稠密时,点级别的匹配关系难以实时计算。为了解决这些问题,许多使用环境中更高维度信息的icp变种算法被提出。这类方法在点云中提取直线、曲线、平面等特征,构建点到线、点到平面、平面到平面等的代价函数。
3、zhang等人首先提出了一种低漂移、实时的激光雷达里程计和建图算法loam(lidar odom-etry and mapping in real-time)。其前端提取了平面特征点和平面相交直线的角落线特征点,并通过最小化点到直线、点到平面距离的代价函数求解无人机的位姿变化;得益于这种基于特征的里程计方法,其可以在多数机载嵌入式计算平台上实时解算。许多方法在此基础上进行了改进,例如lio-sam(tightly-coupled lidar iner-tialodometry via smoothing and mapping)在前端提出了一个基于因子图的激光惯性松耦合方法,利用激光雷达里程计高精度的位姿估计修正imu的测量偏差,再以高频的imu测量预测lidar的运动,为点云去畸变、里程计求解提供信息。wang等人对激光雷达里程计方法进行了改进,提出的f-loam(fast lidar odometry and mapping)构建了新的点到直线、点到平面匹配的代价函数,实现了更加快速、准确的激光雷达里程计求解。
4、虽然这些基于平面特征点和角落线特征点的方法在多数人造环境中是可靠的,但它们在缺乏清晰平面和直线边缘的环境中存在问题,如树林、月球表面等。在特征点提取数量不足的情况下,将会导致运动估计的误差较大、系统定位失败。无人机在体育场馆、航站楼、飞机库、工厂车间、煤棚与仓库等空间网格结构中应用时,就面临上述问题,搭载的激光雷达在建筑上方镂空的柱状网架以及曲面网壳结构中很难获得充足、稳定的平面特征点和平面相交直线的角落线特征点,限制了自主导航无人机在该环境下的使用。
5、因此,有必要对空间网络结构中的无人机激光惯性里程计方法进一步研究,以解决上述问题。
技术实现思路
1、无人机在体育场馆、航站楼、飞机库、工厂车间、煤棚与仓库等空间网格结构中应用时,搭载的激光雷达在建筑上方镂空的柱状网架以及曲面网壳结构中很难获得充足、稳定的平面特征点和平面相交直线的角落线特征点,在特征点提取数量不足的情况下,将会导致运动估计的误差较大、系统定位失败,给基于激光雷达的无人机自主导航带来了巨大的挑战,限制了自主导航无人机在该环境下的使用,为了克服上述问题,本发明人进行了深入研究,提供了一种应用于空间网络结构中的无人机激光惯性里程计方法,包括以下步骤:
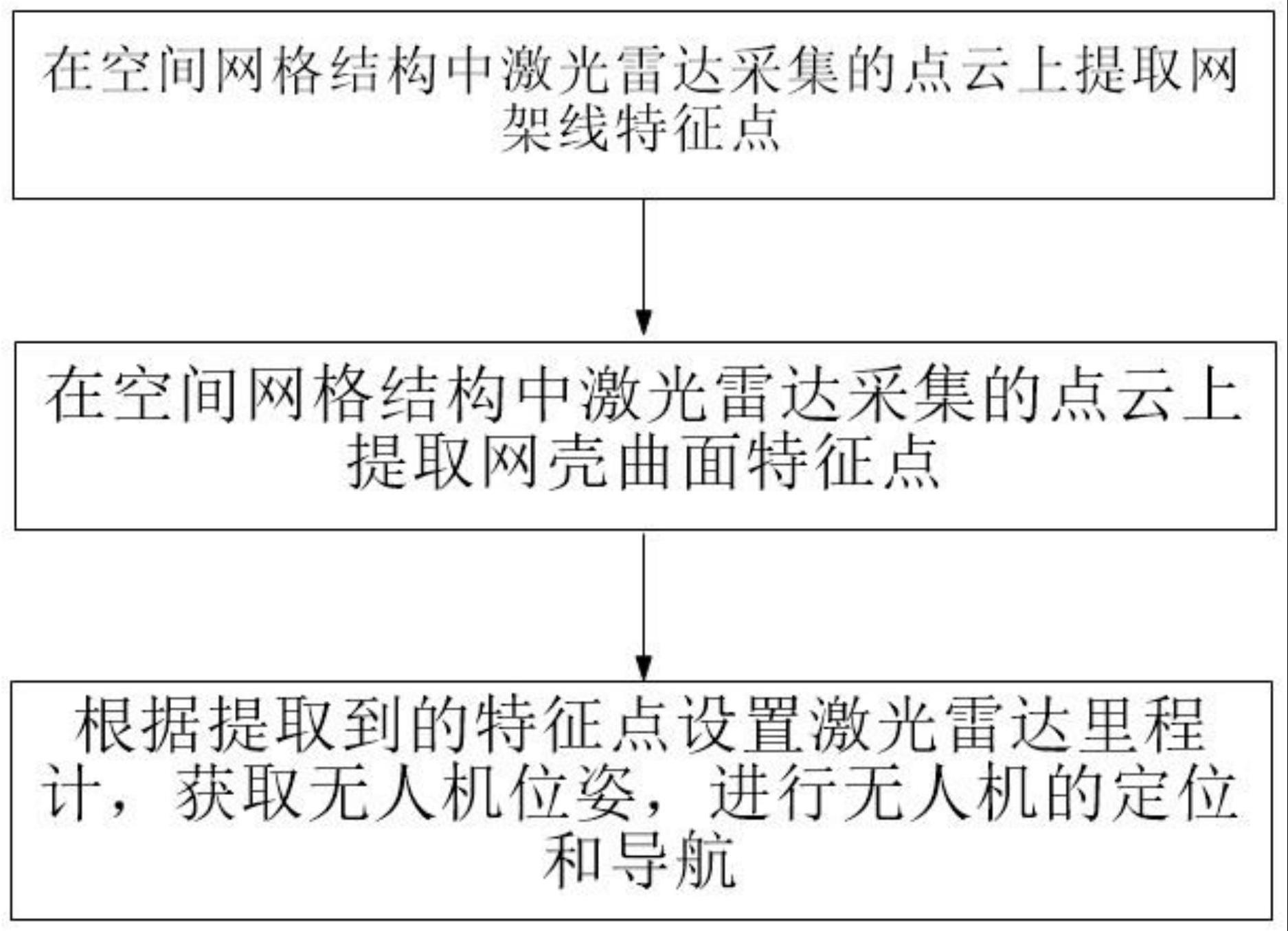
2、在空间网格结构中激光雷达采集的点云上提取网架线特征点;
3、在空间网格结构中激光雷达采集的点云上提取网壳曲面特征点;
4、根据提取到的特征点设置激光雷达里程计,获取无人机位姿,进行无人机的定位和导航。
5、在一个优选的实施方式中,所述网架线特征点的提取包括以下子步骤:
6、s11、去除原始点云的运动畸变;
7、s12、从去畸变激光雷达点云中提取网架线特征。
8、在一个优选的实施方式中,s12中,从去畸变激光雷达点云中筛选满足条件的激光雷达点,将筛选出的激光雷达点作为网架线特征点。
9、在一个优选的实施方式中,针对任意一个激光雷达点,当满足筛选条件时,将其作为网架线特征点,所述筛选条件表示为:
10、le_th≤rk,j+m-rk,j≤ue_th
11、le_th≤rk,j-m-rk,j≤ue_th
12、其中,rk,j为待筛选激光雷达点到激光雷达的距离,所述待筛选激光雷达点为第k层线束中第j光束对应的激光雷达点;rk,j+m表示第k层线束中第j+m光束对应激光雷达点到激光雷达的距离;rk,j-m表示第k层线束中第j-m光束对应激光雷达点到激光雷达的距离,le_th为设定的最小距离阈值,ue_th为设定的最大距离阈值。
13、在一个优选的实施方式中,对网壳曲面特征点进行二次筛选。
14、在一个优选的实施方式中,所述二次筛选通过将网壳曲面特征点与相邻k-1和k+1线束中相同序号的点和进行比较进行,当不满足筛选标准时,将该网壳曲面特征点删除。
15、在一个优选的实施方式中,所述根据提取到的特征点设置激光雷达里程计,获取无人机位姿,进行无人机的定位和导航,包括以下子步骤:
16、s31、根据网架线特征点及其邻点,获得局部网架线的几何中心和目标直线方向;
17、s32、获得网架线特征点到目标直线的距离;
18、s33、根据网壳曲面特征点及其邻点,获得网壳曲面特征点到目标平面的距离;
19、s34、将网架线特征点到目标直线的距离以及网壳曲面特征点到目标平面的距离之和作为代价函数,获得无人机位姿,将无人机位姿与imu进行松耦合,实现无人机的定位和导航。
20、在一个优选的实施方式中,s31中,对于任意一个网架线特征点寻找多个与其最近的邻点,将该网架线特征点和最近邻点组合成点集,计算获得点集的几何中心,该几何中心即为该网架线特征点的最近邻几何中心;根据点集拟合直线,该直线方向即为目标直线的方向。
21、在一个优选的实施方式中,s32中,网架线特征点到目标直线的距离表示为:
22、
23、其中,为网架线特征点,为网架线特征点到目标直线的距离,a为特征点到目标直线方向的单位向量,为激光雷达在导航坐标系的位姿转换矩阵,为网架线特征点的最近邻几何中心,为目标直线的方向。
24、在一个优选的实施方式中,s33中,网壳曲面特征点到目标平面的距离表示为:
25、
26、其中,为网壳曲面特征点,为网壳曲面特征点到目标平面的距离,为激光雷达在导航坐标系的位姿转换矩阵,为网壳曲面特征点的最近邻的几何中心,为目标平面的法向量。
27、本发明所具有的有益效果包括:
28、(1)仅使用逻辑判断就实现了网架线特征提取,提取过程简单、高效,提高了无人机位姿的估计准确度;
29、(2)提高了空间网格结构中无人机激光惯性里程计的准确度。
技术特征:
1.一种应用于空间网络结构中的无人机激光惯性里程计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的应用于空间网络结构中的无人机激光惯性里程计方法,其特征在于,
3.根据权利要求2所述的应用于空间网络结构中的无人机激光惯性里程计方法,其特征在于,
4.根据权利要求3所述的应用于空间网络结构中的无人机激光惯性里程计方法,其特征在于,
5.根据权利要求1所述的应用于空间网络结构中的无人机激光惯性里程计方法,其特征在于,
6.根据权利要求5所述的应用于空间网络结构中的无人机激光惯性里程计方法,其特征在于,
7.根据权利要求1所述的应用于空间网络结构中的无人机激光惯性里程计方法,其特征在于,
8.根据权利要求7所述的应用于空间网络结构中的无人机激光惯性里程计方法,其特征在于,
9.根据权利要求7所述的应用于空间网络结构中的无人机激光惯性里程计方法,其特征在于,
10.根据权利要求7所述的应用于空间网络结构中的无人机激光惯性里程计方法,其特征在于,
技术总结
本发明公开了一种应用于空间网络结构中的无人机激光惯性里程计方法,包括以下步骤:在空间网格结构中激光雷达采集的点云上提取网架线特征点;在空间网格结构中激光雷达采集的点云上提取网壳曲面特征点;根据提取到的特征点设置激光雷达里程计,获取无人机位姿,进行无人机的定位和导航。本发明公开的应用于空间网络结构中的无人机激光惯性里程计方法,提高了无人机位姿的估计准确度,尤其提高了空间网格结构中无人机激光惯性里程计的准确度。
技术研发人员:金忍,褚昭晨,吕军宁,刘长勇,刘鹏博,姜鹏鹏,米培良
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!