一种多目标多功能检测设备、系统及方法与流程
本发明涉及机械生产加工,特别涉及一种多目标多功能检测设备、系统及方法。
背景技术:
1、在生产制造领域,流水线上的产品都需要对其所有功能进行检测才可以出厂销售,产品检测操作是产品加工工艺流程中所不可缺少的一部分。
2、现有技术中,对于功能繁多的复杂产品,工厂需要建立多个工位,每个工位的操作员只能同时对一个产品的功能进行检测;这样的检测方式会导致生产效率不高、人员耗费大、检测过程无法追溯、误判率高等问题。
技术实现思路
1、本发明主要解决的技术问题是提供一种多目标多功能检测设备、系统及方法,实现通过一个操作员同时对多个产品、多种功能的检测,以达到高效且全面、准确的检测效果。
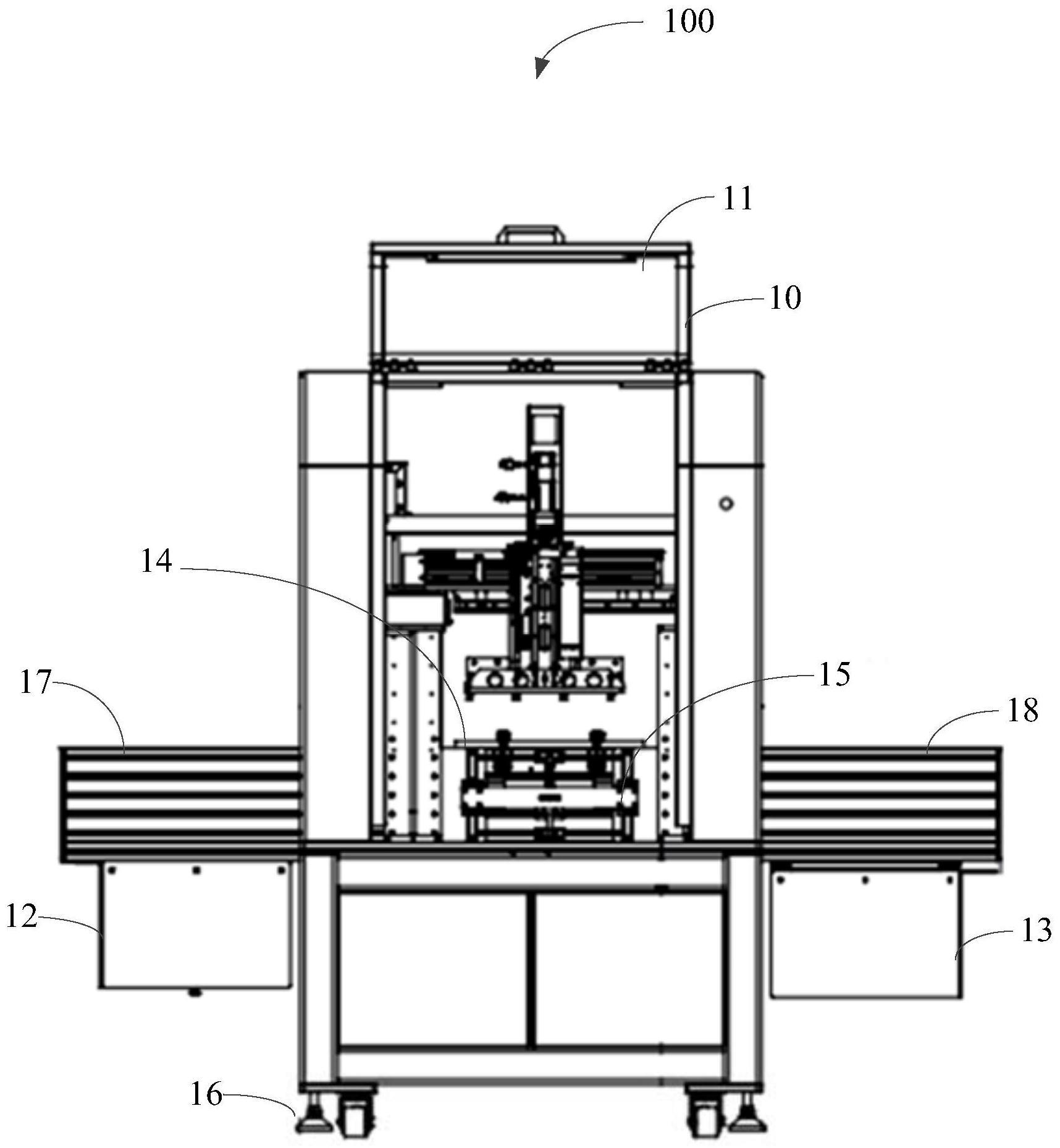
2、为解决上述技术问题,本发明采用的一个技术方案是:提供一种多目标多功能检测设备,包括:设备本体、上开门、第一防护罩、第二防护罩、升降螺杆、脚杯脚轮组;其中,所述上开门设置在所述设备本体的顶端,所述脚杯脚轮组设置在所述设备本体的底端;还包括:测试盒、机械臂、带有升降平台的自回转传送装置、计算机控制系统以及伺服模块;所述带有升降平台的自回转传送装置,包括:托盘、传送带模块、传感器模块、取放板工位、功能测试工位以及气缸升降模块;所述机械臂上安装按键单元以及相机单元;所述计算机控制系统包括检测模块,对应所述带有升降平台的自回转传送装置的功能测试工位设置;所述计算机控制系统,与所述带有升降平台的自回转传送装置、所述伺服模块通信连接,用于根据预先设置的产品检测程序,生成相应的控制指令;所述带有升降平台的自回转传送装置,用于响应所述计算机控制系统的控制指令控制所述传送带模块、气缸升降模块工作,将一个或多个承载待检测产品的托盘,从所述取放板工位至所述功能测试工位依次回转运送;所述伺服模块,用于响应所述计算机控制系统的控制指令,控制所述机械臂沿着预先设定的方向移动,从而带动所述按键单元、相机单元向预先设定的方向移动,以移动到待检测产品的相应方位上;所述检测模块,与所述测试盒、按键单元以及相机单元分别建立通信连接,用于响应所述计算机控制系统的控制指令对位于所述功能测试工位上的待检测产品对应方位的部分进行测试。
3、其中,所述带有升降平台的自回转传送装置还包括预先设置的第一等待工位、第二等待工位;所述气缸升降模块,包括:第一气缸升降平台,对应所述取放板工位设置,用于带动放置在所述取放板工位上的第一托盘沿竖直方向上下往复地运动;以及第二气缸升降平台,对应所述第二等待工位设置,用于带动放置在所述第二等待工位上的第一托盘沿竖直方向上下往复地运动;所述传送带模块,包括:第一传送带,横向设置在所述第一气缸升降平台上表面,用于带动放置在所述第一传送带上的第一托盘在所述第一气缸升降平台的上表面沿着水平方向往复运动;第二传送带,设置在所述第一气缸升降平台与第二气缸升降平台之间,且对应位于第二工作状态下的所述第一气缸升降平台和第二气缸升降平台所在平面设置,用于在所述第一气缸升降平台与第二气缸升降平台位于第二工作状态时,带动放置在所述第二传送带上的第一托盘在所述第一气缸升降平台与第二气缸升降平台之间沿着水平方向往复运动;第三传送带,横向设置在所述第二气缸升降平台上表面,用于带动放置在所述第二传送带上的第一托盘在所述第二气缸升降平台的上表面沿着水平方向往复运动;第四传送带,设置在位于第一工作状态下的所述第一气缸升降平台和第二气缸升降平台所在平面,用于在所述第一气缸升降平台与第二气缸升降平台位于第一工作状态时,带动放置在所述第四传送带上的第一托盘在所述第一气缸升降平台与第二气缸升降平台之间沿着水平方向往复运动;其中,所述第一工作状态为所述第一气缸升降平台/第二气缸升降平台的平面沿着竖直方向向上升起第一预定高度时的工作状态;所述第二工作状态为所述第一气缸升降平台/第二气缸升降平台的平面沿着竖直方向向上升起第二预定高度时的工作状态;所述第一预定高度值大于所述第二预定高度值;所述第一防护罩对应所述取放板工位进行设置,且对应设置在所述第一气缸升降平台的外部;所述第二防护罩对应所述第二等待工位进行设置,且对应设置在所述第二气缸升降平台的外部。
4、其中,所述带有升降平台的自回转传送装置还包括:气缸升降控制模块,与所述第一气缸升降平台、第二气缸升降平台连接;传送带控制模块,与所述第一传送带、第二传送带、第三传送带以及第四传送带连接;控制器,包括:气缸升降控制单元,与所述气缸升降控制模块连接,用于根据所述传感器模块采集到的信号以确定承载了待检测产品的托盘当前所处于的工位,控制所述气缸升降控制模块驱动第一气缸升降平台、第二气缸升降平台交替地位于第一工作状态和第二工作状态;传送带控制单元,与所述传送带控制模块连接,用于根据所述传感器模块采集到的信号以确定承载了待检测产品的托盘当前所处于的工位、以及所述第一气缸升降平台、第二气缸升降平台当前所处于的工作状态,驱动所述传送带控制模块控制所述第一传送带、第二传送带、第三传送带以及第四传送带工作运转,以将所述托盘由所述取放板工位经由所述第一等待工位、第二等待工位运送至所述功能测试工位上。
5、其中,所述传感器模块,包括:第一传感器,设置在所述第一气缸升降平台的平台上;第二传感器,设置在所述第一气缸升降平台的气缸第一高度;第三传感器,设置在所述第一气缸升降平台的气缸第二高度;第四传感器,设置在所述第二传送带靠近所述第二气缸升降平台的一端;第五传感器,设置在所述第二气缸升降平台的气缸第一高度;第六传感器,设置在所述第二气缸升降平台的气缸第二高度;第七传感器,设置在所述第二气缸升降平台的平台上;第八传感器,设置在所述第四传送带上,且对应所述功能测试工位。
6、其中,所述气缸升降控制单元,具体用于:读取所述第一传感器的信号以判断所述取放板工位是否已经放入承载了待检测产品的托盘;读取所述第二传感器的信号以判断所述第一气缸升降平台是否位于所述第一工作状态;在确定所述取放板工位已经放入承载了待检测产品的托盘,且所述第一气缸升降平台处于第一工作状态时,生成第一控制信号,使所述气缸升降控制模块响应所述第一控制信号控制所述第一气缸升降平台的气缸下降;读取所述第三传感器的信号以判断所述第一气缸升降平台是否位于所述第二工作状态;以及在确定所述第一气缸升降平台位于所述第二工作状态时,生成第二控制信号,使所述气缸升降控制模块响应所述第二控制信号控制所述第一气缸升降平台的气缸停止下降;所述传送带控制单元,具体用于:在所述第一气缸升降平台位于所述第二工作状态时,驱动所述传送带控制模块控制所述第一传送带以及第二传送带运转,以将位于所述取放板工位的托盘运送至所述第一等待工位上;读取所述第四传感器的信号以判断承载了待检测产品的托盘是否位于所述第一等待工位上;以及在确定承载了待检测产品的托盘位于所述第一等待工位上,且所述第二气缸升降平台位于所述第二工作状态时,驱动所述传送带控制模块控制所述第二传送带以及第三传送带运转,以将位于所述第一等待工位上的托盘运送至所述第二等待工位上。
7、其中,所述气缸升降控制单元,具体还用于:读取所述第七传感器的信号以判断所述第二等待工位是否已经放入承载了待检测产品的托盘;读取所述第六传感器的信号以判断所述第二气缸升降平台是否位于所述第二工作状态;在确定所述第二等待工位已经放入承载了待检测产品的托盘,且所述第二气缸升降平台处于第二工作状态时,生成第三控制信号,使所述气缸升降控制模块响应所述第三控制信号控制所述第二气缸升降平台的气缸上升;读取所述第五传感器的信号以判断所述第二气缸升降平台是否位于所述第一工作状态;以及在确定所述第二气缸升降平台位于所述第一工作状态时,生成第四控制信号,使所述气缸升降控制模块响应所述第四控制信号控制所述第二气缸升降平台的气缸停止上升;所述传送带控制单元,具体还用于:在所述第二气缸升降平台位于所述第一工作状态时,驱动所述传送带控制模块控制所述第三传送带以及第四传送带运转,以将位于所述第二等待工位的第一托盘运送至所述功能测试工位上;读取所述第八传感器的信号以判断承载了待检测产品的托盘是否位于所述功能测试工位上;在完成所述待检测产品的功能测试时,读取所述第一传感器的信号以判断所述第一气缸升降平台是否位于所述第一工作状态;以及在确定所述第一气缸升降平台位于所述第一工作状态时,驱动所述传送带控制模块控制所述第一传送带以及第四传送带运转,以将位于所述功能测试工位上的托盘运送至所述取放板工位上,使得所述第一托盘回复到初始位置,以等待放入新的待检测产品。
8、其中,所述带有升降平台的自回转传送装置包括第一托盘、第二托盘、第三托盘,间隔预设距离地依次分布在所述传送带模块上。
9、其中,所述按键单元,包括:第一按键机构、第二按键机构、第三按键机构以及第四按键机构;所述相机单元,包括:第一相机、第二相机、第三相机以及第四相机;所述伺服模块包括x、y、z1、z2轴;其中,z1轴挂载所述机械臂,z2轴挂载所述测试盒;所述伺服模块,还用于响应所述计算机控制系统的控制,驱动所述机械臂沿着x轴、y轴或z1轴方向运动,以相应地带动所述第一按键机构、第二按键机构、第三按键机构和第一相机、第二相机、第三相机进行x轴方向、y轴方向或z1轴方向的运动;以及驱动所述测试盒沿着z轴方向运动,以实现测试盒产品进行硬件连接(测试盒上有顶针,顶到产品的接触点),进而实现供电、通信交互、电压电流检测等功能;对待检测产品底部的功能测试;其中,z1轴、z2轴均为z轴的纵向方向。
10、其中所述测试盒包括:第一功能检测机构,用于响应所述检测模块的控制指令对待检测产品的蜂鸣器的声音进行分贝及频率检测;第二功能检测机构,用于响应所述检测模块的控制指令通过红外接收/发射器对待检测产品的红外功能进行检测;第三功能检测机构,用于响应所述检测模块的控制指令通过相机对待检测产品的发光元器件进行检测;第四功能检测机构,用于响应所述检测模块的控制指令通过气缸按键对待检测产品的各种按键进行检测;第五功能检测机构,用于响应所述检测模块的控制指令对待检测产品的通信功能进行检测;第六功能检测机构,用于响应所述检测模块的控制指令对待检测产品的软件版本及其他软件信息进行检测;第七功能检测机构,用于响应所述检测模块的控制指令对待检测产品的电压、电流进行检测。
11、为解决上述技术问题,本发明采用的另一个技术方案是:提供一种多目标多功能检测系统,包括:mes服务器、产品数据采集及通信装置、以及如上所述的多目标多功能检测设备;所述多目标多功能检测设备包括测试盒、机械臂、带有升降平台的自回转传送装置、计算机控制系统以及伺服模块;所述计算机控制系统与所述产品数据采集及通信装置通信连接,用于采集产品数据;所述计算机控制系统,用于:根据预先设置的产品检测程序生成相应的控制指令,控制所述带有升降平台的自回转传送装置将一个或多个承载待检测产品的托盘从取放板工位至功能测试工位依次回转运送;控制所述伺服模块驱动所述测试盒、机械臂按照相应的方向移动至待检测产品相应方位上;以及协调所述测试盒、机械臂以通过所述测试盒、设置在所述机械臂上的按键单元和相机单元对位于所述功能测试工位上的待检测产品对应方位的部分进行测试;所述计算机控制系统还与所述mes服务器通信连接,用于将所述多目标多功能检测设备生成的测试数据保存至所述mes服务器中。
12、为解决上述技术问题,本发明采用的另一个技术方案是:提供一种多目标多功能检测方法,应用于如上所述的多目标多功能检测设备,所述方法包括:计算机控制系统根据预先设置的产品检测程序,生成相应的控制指令;带有升降平台的自回转传送装置响应所述控制指令,将一个或多个承载待检测产品的托盘从取放板工位至功能测试工位依次回转运送;伺服模块响应所述控制指令驱动测试盒、机械臂按照相应的方向移动至待检测产品的相应方位上;所述计算机控制系统控制所述测试盒、机械臂,以通过所述测试盒、设置在所述机械臂上的按键单元和相机单元对位于所述功能测试工位上的待检测产品对应方位的部分进行测试。
13、其中,所述方法还包括:所述计算机控制系统将测试过程及测试结果的各项数据保存到mes服务器中。
14、其中,所述“带有升降平台的自回转传送装置响应所述控制指令,将一个或多个承载待检测产品的托盘从取放板工位至功能测试工位依次回转运送”,具体包括:所述带有升降平台的自回转传送装置根据传感器模块采集到的信号以确定承载了待检测产品的托盘当前所处于的工位,控制第一气缸升降平台、第二气缸升降平台交替地位于第一工作状态和第二工作状态;其中,预先设置第一等待工位、第二等待工位、取放板工位、功能测试工位;所述第一工作状态为所述第一气缸升降平台/第二气缸升降平台的平面沿着竖直方向向上升起第一预定高度时的工作状态;所述第二工作状态为所述第一气缸升降平台/第二气缸升降平台的平面沿着竖直方向向上升起第二预定高度时的工作状态;所述第一预定高度值大于所述第二预定高度值;所述带有升降平台的自回转传送装置根据所述传感器模块采集到的信号以确定承载了待检测产品的托盘当前所处于的工位、以及所述第一气缸升降平台、第二气缸升降平台当前所处于的工作状态,控制传送带模块运转,以将所述托盘由所述取放板工位经由第一等待工位、第二等待工位运送至功能测试工位上。
15、其中,所述“所述带有升降平台的自回转传送装置根据传感器模块采集到的信号以确定承载了待检测产品的托盘当前所处于的工位,控制第一气缸升降平台、第二气缸升降平台交替地位于第一工作状态和第二工作状态”,具体包括:读取第一传感器、第二传感器的信号,以根据所述第一传感器采集到的信号判断所述取放板工位是否已经放入承载了待检测产品的第一托盘,根据所述第二传感器采集到的信号判断所述第一气缸升降平台是否位于所述第一工作状态;其中,所述第一传感器设置在所述第一气缸升降平台的平台上;所述第二传感器设置在所述第一气缸升降平台的气缸第一高度;在确定所述取放板工位已经放入承载了待检测产品的第一托盘,以及所述第一气缸升降平台位于所述第一工作状态时,制所述第一气缸升降平台的气缸下降;读取第三传感器的信号以判断所述第一气缸升降平台是否位于所述第二工作状态;其中,所述第三传感器设置在所述第一气缸升降平台的气缸第二高度;在确定所述第一气缸升降平台位于所述第二工作状态时,控制所述第一气缸升降平台的气缸停止下降;“所述带有升降平台的自回转传送装置根据所述传感器模块采集到的信号以确定承载了待检测产品的托盘当前所处于的工位、以及所述第一气缸升降平台、第二气缸升降平台当前所处于的工作状态,控制传送带模块运转,以将所述托盘由所述取放板工位经由第一等待工位、第二等待工位运送至功能测试工位上”,具体包括:控制所述传送带模块的第一传送带以及第二传送带运转,以将位于所述取放板工位的第一托盘运送至所述第一等待工位上;其中,所述第一传送带横向设置在所述第一气缸升降平台上表面;所述第二传送带设置在所述第一气缸升降平台与第二气缸升降平台之间,且对应所述第一气缸升降平台与第二气缸升降平台位于第二工作状态下所在平面进行设置;读取第四传感器的信号以判断承载了待检测产品的第一托盘是否位于所述第一等待工位上;其中,所述第四传感器设置在所述第二传送带靠近所述第二气缸升降平台的一端;控制所述传送带模块的第二传送带以及第三传送带运转,以将位于所述第一等待工位上的第一托盘运送至所述第二等待工位上;其中,所述第三传送带横向设置在所述第二气缸升降平台上表面。
16、其中,“控制所述传送带模块的第二传送带以及第三传送带运转,以将位于所述第一等待工位上的第一托盘运送至所述第二等待工位上”之后,所述“所述带有升降平台的自回转传送装置根据传感器模块采集到的信号以确定承载了待检测产品的托盘当前所处于的工位,控制第一气缸升降平台、第二气缸升降平台交替地位于第一工作状态和第二工作状态”,还包括:读取第六传感器以及第七传感器的信号,以根据所述第六传感器采集到的信号判断所述第二气缸升降平台是否位于所述第二工作状态,根据所述第七传感器采集到的信号判断所述第二等待工位是否已经放入承载了待检测产品的第一托盘;其中,所述第六传感器设置在所述第二气缸升降平台的气缸第二高度;所述第七传感器设置在所述第二气缸升降平台的平台上;在确定所述第二气缸升降平台位于所述第二工作状态,且所述第二等待工位已经放入承载了待检测产品的第一托盘时,控制所述第二气缸升降平台的气缸上升;读取第五传感器的信号以判断所述第二气缸升降平台是否位于所述第一工作状态;其中,所述第五传感器设置在所述第二气缸升降平台的气缸第一高度;在确定所述第二气缸升降平台位于所述第一工作状态时,控制所述第二气缸升降平台的气缸停止上升;“所述带有升降平台的自回转传送装置根据所述传感器模块采集到的信号以确定承载了待检测产品的托盘当前所处于的工位、以及所述第一气缸升降平台、第二气缸升降平台当前所处于的工作状态,控制传送带模块运转,以将所述托盘由所述取放板工位经由第一等待工位、第二等待工位运送至功能测试工位上”,还包括:控制第三传送带以及第四传送带运转,以将位于所述第二等待工位的第一托盘运送至所述功能测试工位上;其中,所述第三传送带横向设置在所述第二气缸升降平台上表面;所述第四传送带设置在所述第一气缸升降平台与第二气缸升降平台位于第一工作状态下所在平面进行设置;读取第八传感器的信号以判断承载了待检测产品的第一托盘是否位于所述功能测试工位上;其中,所述第八传感器设置在所述第四传送带上,且对应所述功能测试工位。
17、其中,“所述计算机控制系统控制所述测试盒、机械臂,以通过所述测试盒、设置在所述机械臂上的按键单元和相机单元对位于所述功能测试工位上的待检测产品对应方位的部分进行测试”之后,“所述带有升降平台的自回转传送装置根据所述传感器模块采集到的信号以确定承载了待检测产品的托盘当前所处于的工位、以及所述第一气缸升降平台、第二气缸升降平台当前所处于的工作状态,控制传送带模块运转,以将所述托盘由所述取放板工位经由第一等待工位、第二等待工位运送至功能测试工位上”,还包括:读取所述第一传感器的信号以判断所述第一气缸升降平台是否位于所述第一工作状态;在确定所述第一气缸升降平台位于所述第一工作状态时,控制所述第一传送带以及第四传送带运转,以将位于所述功能测试工位上的第一托盘运送至所述取放板工位上,使得所述第一托盘回复到初始位置,以等待放入新的待检测产品。
18、其中,所述“所述计算机控制系统控制所述测试盒、机械臂,以通过所述测试盒、设置在所述机械臂上的按键单元和相机单元对位于所述功能测试工位上的待检测产品对应方位的部分进行测试”,具体包括:所述计算机控制系统控制所述测试盒、机械臂,以通过第一功能检测机构对位于所述功能测试工位上的待检测产品对应方位的蜂鸣器的声音进行分贝及频率检测;所述计算机控制系统控制所述测试盒、机械臂,以通过第二功能检测机构控制红外接收/发射器对位于所述功能测试工位上的待检测产品对应方位的红外功能进行检测;所述计算机控制系统控制所述测试盒、机械臂,以通过第三功能检测机构、设置在所述机械臂上的相机单元对位于所述功能测试工位上的待检测产品对应方位的发光元器件进行检测;所述计算机控制系统控制所述测试盒、机械臂,以通过第四功能检测机构、设置在所述机械臂上的按键单元对位于所述功能测试工位上的待检测产品对应方位的按键进行检测;所述计算机控制系统控制所述测试盒、机械臂,以通过第五功能检测机构对位于所述功能测试工位上的待检测产品对应方位的通信功能进行检测;所述计算机控制系统控制所述测试盒、机械臂,以通过第六功能检测机构对位于所述功能测试工位上的待检测产品的软件版本及其他软件信息进行检测;所述计算机控制系统控制所述测试盒、机械臂,以通过第七功能检测机构对位于所述功能测试工位上的待检测产品的电压、电流进行检测。
19、其中,所述“所述计算机控制系统控制所述测试盒、机械臂,以通过所述测试盒、设置在所述机械臂上的按键单元和相机单元对位于所述功能测试工位上的待检测产品对应方位的部分进行测试”,具体包括:所述计算机控制系统控制机械臂移动以带动按键单元,使其对准待检测产品的按钮所在位置,控制按键按下,使检测模块控制测试盒同待检测产品通信,以读取按钮值;所述计算机控制系统控制机械臂移动以带动所述相机单元,使其对准待检测产品的显示模块,使所述检测模块控制测试盒与待检测产品通信,使得待检测产品的灯进行显示,所述检测模块控制相机进行拍照并分析拍到的图案以判断待检测产品的“产品显示模块”是否正常。
20、以上方案中,通过所述带有升降平台的自回转传送装载,设置两个气缸升降平台,气缸升降平台上还对应设置传送带,配合上下两路的传送带最终能实现托盘自动回转功能。所述测试盒升降伺服电机设置4个轴,通过控制x、y、z1可以灵活控制按键机构和相机到达任意位置,控制z2轴升降可以将被测产品与底部测试盒进行硬件连接,通过多个轴的协调运动可以对不同产品不同的检测位置进行全方位测试。所述多目标多功能检测设备通过多个测试模块,按照产品的检测要求,进行多个功能的测试,可以实现多目标同时检测,具备多种功能的检测能力,检测过程会将的检测数据记录下来方便追溯;通过回转机构及多轴伺服机构完成自动化检测,最终能达到了高效的、高度自动化的、全面的、准确的检测效果。
- 还没有人留言评论。精彩留言会获得点赞!