一种基于增强型蝠鲼觅食优化算法的无人机路径规划方法
本发明涉及智能计算,具体涉及一种基于蝠鲼觅食优化算法的无人机路径规划方法。
背景技术:
1、随着无人机的技术不断发展,路径规划的研究显得尤为重要。通过路径规划,无人机可以在一定的条件下实现最优的航行路径,从而使无人机的飞行更加安全、高效、节能。路径规划的研究可以帮助开发出更加智能化的无人机系统,从而提高无人机的运行效率,满足不同应用场景的需求。路径规划的研究不仅可以帮助提高无人机的运行效率,还可以为无人机系统提供一个可靠的保障,确保无人机在飞行过程中的安全性。此外,路径规划研究还可以帮助开发出能够应对复杂环境的无人机系统,使其能够在复杂的环境中安全地飞行。因此,无人机路径规划的研究具有重要的意义,为无人机系统的发展和应用奠定了坚实的基础。复杂环境下路径规划是无人机的关键技术之一。近年来,智能优化算法被广泛应用于各种环境下无人机的路径规划。例如,粒子群算法,蚁群算法,蝙蝠算法在无人机路径规划领域得到了大量应用并取得不错的成果。而新型的进化算法比如灰狼算法,鲸鱼算法,针对各自侧重的方向也做出了针对性的优化。
2、上述算法都能解决无人机的路径规划问题。如何在特定环境下有效地规划出最优路径是我们需要考虑的问题。受蝠鲼特殊捕食方式的启发下,一种新的元启发式优化算法--蝠鲼觅食优化算法(mrfo),最初由赵文刚于2020年提出。它在全局收敛方面有明显的优势,因此它被应用于许多优化问题。原始的蝠鲼觅食优化算法虽然有着参数少,收敛快,鲁棒性强等优点,但是容易陷入局部最优,收敛过早,计算精度低等缺陷。因此,本发明主要针对mrfo的无人机静态全局路径规划,现有的技术规划方法存在精度不高和容易陷入局部最优的问题。
技术实现思路
1、本发明所要解决的技术问题是,针对现有蝠鲼觅食优化算法种群多样性差,易陷入局部最优的问题,提供一种能有效跳出局部最优,平衡全局探索能力和局部探索能力的无人机路径规划方法。
2、本发明为解决上述技术问题所采用的技术方案是,一种基于增强型蝠鲼觅食优化算法的无人机路径规划方法,包括步骤:
3、步骤1:建立包含障碍的三维地图,设置蝠鲼种群中包含的蝠鲼个体的个数n,最大迭代次数t;一个蝠鲼种群对应一对起点和终点,一个蝠鲼种群中的蝠鲼个体就是相同起点和终点下的不同无人机路径;一个蝠鲼种群对应起点与终点之间的一条无人机路径,一个蝠鲼种群中的蝠鲼个体就是该无人机路径中的一个位置点;随机生成避开了障碍的无人机路径之后将该路径作为备选的蝠鲼种群;
4、步骤2:基于备选的蝠鲼种群采用tent混沌映生成用于迭代的初始蝠鲼种群;
5、步骤3:根据适应度函数计算初始蝠鲼种群中每个蝠鲼个体的适应度函数值;
6、步骤4:迭代更新各蝠鲼个体的位置,具体为:
7、先根据当前迭代次数t计算出控制参数conf,生成一个取值范围为(0,1)的随机值rand,设置一个取值范围为(0,1)的预设阈值;e为自然常数;再采用进行三步更新迭代:
8、第一步:根据rand、conf和预设阈值的大小关系采用不同的觅食策略得到更新第t+1次迭代的蝠鲼个体位置:当rand大于等于预设阈值时,采用链式觅食策略;当rand小于预设阈值且conf大于等于rand时,采用基于最佳位置作为参考位置的螺旋觅食策略;当rand小于预设阈值且conf小于rand时,采用基于一个新的随机位置作为参考位置的螺旋觅食策略;
9、第二步:采用翻筋斗觅食策略对第一步得到第t+1次迭代的蝠鲼个体位置更新;
10、第三步:采用莱维levy飞行策略对第二步得到的第t+1次迭代的蝠鲼个体位置更新结果再进行更新得到步骤4最终输出的第t+1次迭代的蝠鲼个体位置;
11、步骤5:基于步骤4输出第t+1次迭代的蝠鲼个体位置来计算对应的路径曲线长度fl、雷达威胁成本fr,障碍物碰撞成本fc,高度变化成本fh,并根据当前蝠鲼个体是否与障碍有碰撞来设置惩罚因子p;
12、步骤6:利用步骤5确定的fl、fr、fc、fh、p计算出当前蝠鲼个体的适应度函数值;更新t=t+1,保留截止第t次迭代完成的整个迭代过程中的适应度函数值的最小值作为当前全局最优解,当前全局最优解对应的点的位置作为最优个体的位置,根据最优个体的位置生成的路径曲线为全局最优曲线,再判断是否达到迭代结束的条件,如否,则返回重复步骤4-6,直至迭代完成,如是,则进入步骤7;
13、步骤7:将输出全局最优曲线作为当前无人机路径规划输出,再更新i=i+1,返回步骤1,直至i=n,则将输出的全局最优曲线作为无人机路径规划的结果。
14、本发明为了让蝠鲼觅食优化算法更好地应用在无人机路径规划上,对蝠鲼觅食优化算法进行了以下改进:
15、(1)引入了tent混沌映射机制,混沌运动具有随机性、规律性、以及遍历性的特征,在求解函数优化问题时这些特性能够使算法容易逃离局部最优解,从而可以维持种群的多样性,同时提高全局搜索能力。
16、(2)改进了控制参数conf调整策略,平衡了全局开发能力和局部开发能力。
17、(3)加入levy飞行策略,对于路径规划问题,跳出局部最优解是群体智能优化算法的关键,而布谷鸟算法中的莱维飞行策略,其特征范围是搜索范围远近交替地随机飞行,可以增强算法跳出局部最优的能力,提高算法的计算精度。
18、本发明的有益效果是,通过引入tent混沌映射,控制参数调整策略,并在该基础上增加levy飞行策略,以上三种改进的引入,融入到蝠鲼觅食优化算法之中,得到最终增强型蝠鲼觅食优化算法,根据仿真结果可以知道,增强型蝠鲼觅食优化算法对比原来的蝠鲼觅食优化算法有更好的全局性;提高了无人机的航迹规划的精度,并使路径更为平滑,节省了迭代的时间和计算所需的资源,更高效地完成复杂环境下无人机飞行地任务。
技术特征:
1.一种基于增强型蝠鲼觅食优化算法的无人机路径规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述方法,其特征在于,所述障碍包括山峰障碍物和雷达障碍。
3.根据权利要求1所述方法,其特征在于,步骤2具体为:
4.根据权利要求1所述方法,其特征在于,每个蝠鲼个体的适应度函数值的计算方式为:
技术总结
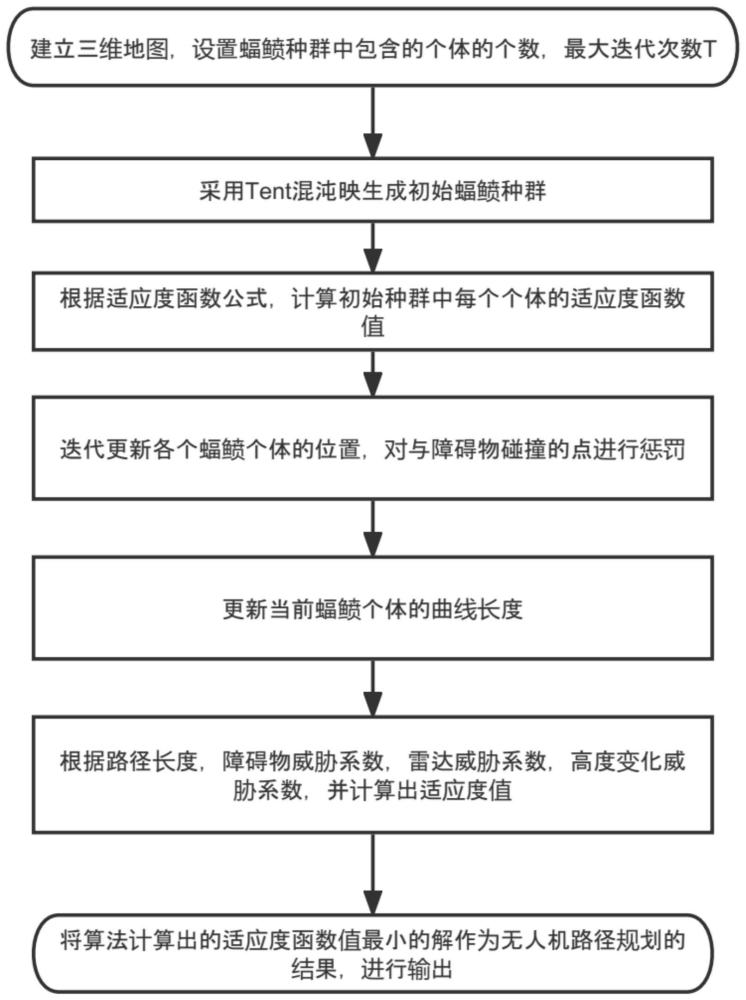
本发明涉及一种基于增强型蝠鲼觅食优化算法的无人机路径规划方法,包括:建立三维地图,设置蝠鲼种群中包含的个体的个数和最大迭代次数;采用Tent混沌映生成初始蝠鲼种群;根据适应度函数公式,计算初始种群中每个个体的适应度函数值。迭代更新各个蝠鲼个体的位置;更新当前蝠鲼个体的曲线长度;根据路径长度,障碍物碰撞成本,雷达威胁成本,高度变化成本,并计算出适应度函数值;算法计算出的适应度函数值最小的解作为无人机路径规划的结果,进行输出。本发明通过引入Tent混沌映射,提升了种群初始化的时候的多样性;采用控制参数调整策略,平衡了算法的局部搜索能力和全局搜索能力;在该基础上增加levy飞行策略,增加了跳出局部最优的能力。
技术研发人员:龙跃,刘昕,李铁山
受保护的技术使用者:电子科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!