一种飞机转向角度检测方法与流程
本发明属于航空地面保障设备,涉及飞机转向时转向角度实时检测方法,具体涉及一种飞机转向角度检测方法。
背景技术:
1、飞机在地面被牵引移动时,需要飞机沿着指定的轨迹线进行移动,以保障飞机不与周围障碍物发生碰撞,飞机移动轨迹线存在拐弯工况,在飞机进行行进轨迹修正和飞机沿轨迹线进行转向时,是依靠地面牵引装置控制飞机前起的转向进而实现飞机移动方向的调整。
2、飞机前起通过起落架与机身连接,飞机起落架在转向时的转向角度并不是360°自由旋转,飞机转向起落架的转向角度必须控制在一定范围内,超出这个范围会损坏起落架,造成飞机事故,具有重大安全影响。所以在牵引时,必须时刻关注飞机转向起落架的转向角度,进而保证转向角度在允许的范围内。
3、飞机转向起落架是一套复杂的运动机构组合,发生超范围转向现象后,会导致起落架损坏,甚至发生飞机倾覆事故,所以在牵引移动时,必须时刻关注飞机转向角度,不能发生过转现象。飞机在牵引行走时,依靠牵引装置控制飞机转向角度,目前主要依靠沿轨迹线走和人为观察预估飞机转向角度来保障飞机转向角度在要求的范围内,不能实时准确了解飞机转向角度值。且该方法在轨迹线错误或者操作人员疏忽时以及在小空间大角度挪动飞机时,均会导致无法度量飞机转向角度,存在较大安全隐患。
技术实现思路
1、本发明解决的技术问题是提供了一种飞机转向角度检测方法,该方法有效解决了飞机牵引操作人员无法实时直观地查看到飞机转向角度的问题。
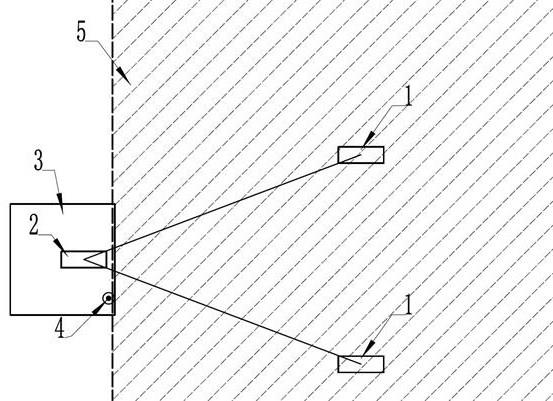
2、本发明为解决上述技术问题采用如下技术方案,一种飞机转向角度检测方法,其特征在于具体过程为:先将激光雷达安装于飞机牵引装置上且激光雷达坐标系y轴与飞机牵引装置的前后运动方向中轴线平行,该激光雷达用于扫描飞机牵引装置后方区域,再将飞机前起与飞机牵引装置对接,飞机前起中轴线与飞机牵引装置前后运动方向的中轴线完全重合,两组飞机主起在激光雷达的扫描区域范围内,以激光雷达为坐标中心(0,0),建立x/y坐标系,与飞机牵引装置前后运动方向平行方向设为y轴,与飞机牵引装置前后运动方向垂直方向设为x轴,激光雷达与飞机牵引装置安装位置固定,飞机牵引装置的坐标系与激光雷达的坐标系平行,将激光雷达坐标系的y轴平移至飞机牵引装置中轴线形成平行轴y’轴,在激光雷达的坐标系中飞机左侧主起对应的坐标值为(x1,y1),飞机右侧主起对应的坐标值为(x2,y2),飞机前起对应的坐标为固定值(a,b),设飞机左侧主起与飞机牵引装置的坐标系y’轴的夹角为α1,飞机右侧主起与飞机牵引装置的坐标系y’轴的夹角为α2,飞机航向中轴线与飞机牵引装置的坐标系y’轴的夹角为α,通过激光雷达识别并实时获得飞机左侧主起对应的坐标值为(x1,y1)和飞机右侧主起对应的坐标值为(x2,y2),根据得到的实时数据并基于如下公式最终计算得到实时的飞机转向角度:
3、
4、
5、
6、其中α为检测到的实时的飞机转向角度。。
7、进一步限定,所述激光雷达安装在飞机牵引装置上用于实时扫描飞机各轮组模型位置坐标数据,通过以太网向处理器传输点云数据,处理器处理点云数据后,将结果通过通讯形式传送给飞机牵引装置,供飞机牵引装置进行显示和使用。
8、进一步限定,所述激光雷达采用16线以上多线激光雷达,该激光雷达的量程为0.05~120m,测距精度为0.5cm,能够有效保障飞机左侧主起和飞机右侧主起数据测量的精度和效率。
9、进一步限定,所述飞机转向角度检测方法的具体运行流程为:
10、(1)搭建好硬件平台,将激光雷达安装在飞机牵引装置上,通过网线与处理器相连,飞机牵引装置通过通讯方式与处理器进行连接;
11、(2)打开处理器、激光雷达,使得激光雷达能够采集数据,处理器能够处理数据;
12、(3)处理器接收到激光雷达获取到的一帧点云数据;
13、(4)将采集到的点云数据进行滤波,首先进行体素滤波下采样,在不丢失被检测物体的形状特征的前提下去除一定程度的噪音点,利用直通滤波器提取感兴趣区域同时分割地面点云数据,最后进行离群点的消除,为后续的聚类提前准备;
14、(5)利用欧式聚类对点云数据进行分类,通过外接包围盒方法拟合出中心点作为轮胎的中心点;
15、(6)通过测量得到点云数据,分别计算飞机前起与两个飞机主起的距离和角度,利用飞机前后起落架的三角特征进行两个飞机主起的识别,若成功识别两个主起则保存主起数据,进入步骤(9);
16、(7)当未成功识别到两个主起,且主起历史数据为空时,重复步骤(3)~(5),若主起历史数据存在,则利用相同的规则去识别其中一个主起,若成功识别到一个主起,利用三角形规则计算出另一个主起的数据,然后将主起数据进行保存,进入步骤(9);
17、(8)若此时一个主起也未识别到,则利用保留的历史数据进行卡尔曼滤波算法进行预测,将预测的结果保存到历史数据中,进入步骤(9);
18、(9)将最新的结果发送到牵引装置进行显示、应用;
19、(10)没有收到停止信号,则重复步骤(3)~(9)。
20、该飞机转向角度α可通过通讯(可以是tpc/ip、rs485、modbus等各通讯方式)的方式将转向角度实时传送给飞机牵引装置,用于飞机牵引装置的显示使用。
21、该方法内置所有常用机型的3个机轮之间的模型参数(包括飞机主起轮组为单排、双排、单轮、双轮,飞机前起(转向轮组)为单轮、双轮等,以及飞机主起之间、主起与前起(转向轮组)之间的距离等模型参数),通过激光雷达扫描到的模型数据与处理器内置的模型参数进行对比,识别该机型代号,并将该代号与飞机实时转向角度数据一起通过通讯传递给牵引装置使用;
22、该方法可以适应多种机型的转向角度检测;
23、该方法内置激光雷达与多规格飞机牵引装置安装位置之间的相对位置数据(a,b),通过通讯命令,选择当前激光雷达安装的飞机牵引装置的代号,使用该飞机牵引装置的激光雷达相对位置数据进行转向角度的计算;
24、该方法可安装于各种飞机牵引装置上,通过相对位置数据设定和调用,可使用于多种飞机牵引装置;
25、该方法识别算法具有抗干扰能力,可以滤除飞机周边人员或其他物体对检测结果的干扰,准确识别飞机模型数据;
26、该方法可以适应全天候以及室内室外光线变化环境下工作的能力,在较暗环境下无灯光辅助亦可正常工作;
27、该方法无需在飞机任何部位安装辅助工装即可实现飞机转向角度的实时检测,不影响飞机的任何结构。
28、本发明与现有技术相比具有以下优点和有益效果:本发明能够有效解决在轨迹线错误或者操作人员疏忽时以及在小空间大角度挪动飞机时,因不能实时准确检测飞机转向角度导致飞机过转向的问题。本发明完善了现在牵引飞机的过程中无法实时准确识别飞机转向角度值的问题,针对目前现在的人工识别和判断转向角度的方法,本发明具有自动化水平更高及可用性、适应性更强的优点。
- 还没有人留言评论。精彩留言会获得点赞!