一种钟辅助下的高轨北斗接收机定位解算方法
本发明属于卫星导航领域,具体涉及一种钟辅助下的高轨北斗接收机定位解算。
背景技术:
1、运行在地球静止轨道(geostationary orbit satellite,geo)、倾斜地球同步轨道 (inclined geosynchronous orbit,igso)等上的卫星的定轨通常需要依靠地面的测控网络实现。这种定轨方式成本高并且时效性差。如果能像运行在低地球轨道(low-earthorbit,leo)上的卫星那样,通过在星上搭载全球卫星导航系统(global navigationsatellite system,gnss)接收机,实现对卫星的定轨,将能为卫星发射和运行带来极大的便利。适合在geo、igso等卫星上工作的gnss接收机属于高轨gnss接收机,其典型工作高度高于一般导航卫星的轨道高度。高轨gnss接收机接收的导航卫星信号条件与地面和leo卫星上的信号条件完全不同,主要表现在信号弱和几何构形差两个方面。
2、首先,gnss卫星播发的导航信号是朝向地球发射的,全球定位系统(globalpositioning system,gps)l1信号的双边主波束宽度大约是,仅能够覆盖地球及1000km以下leo卫星轨道。高轨gnss接收机恰好位于主瓣照射区域的机会非常小(如图1中由实线表示的主瓣信号区域)。如果仅使用导航卫星的主波束进行定位,即使用上gnss星座的所有导航卫星,可用卫星数也很难达到4颗。为了有更多可用的导航卫星,高轨gnss接收机的灵敏度通常做得很高,从而可以使用部分导航卫星的第1、第2旁瓣进行定位。但是,导航卫星的第1、第2旁瓣的信号功率在三维天线方向图的不同剖面上差异较大。即使在较强的剖面上,信号功率也要比主瓣低10db到20db。此外高轨接收机到导航卫星的距离大约是地面接收机的3倍左右,相应的自由空间传播损耗增加约10db。在距离因素和导航卫星的天线方向图因素的共同作用下,到达高轨gnss接收机的信号功率比地面接收机低10db到30db。其次,由于导航卫星旁瓣信号的覆盖区域,和地心形成的夹角最远有,在位于geo的接收机的视角上,所有可用的导航卫星都分布在地球两侧距地心不超过的狭小区域内(如图1中高轨gnss接收机与gnss #2之间的相对关系),并且地心两侧的范围内,因地球遮挡和电离层的影响没有可用的导航卫星。这些导致接收机可见星的几何构形较差。
3、由于信号弱,高轨gnss接收机典型的接收信号载噪比c/n0值在30(db·hz)左右,对应的码伪距测量精度大约在10m左右,按pdop值35计算,由此导致的单历元解算误差大约350m,远大于地面接收机的误差。同样由于信号弱,能够超过高轨gnss接收机解调门限的导航卫星数较少。即使灵敏度较高的接收机,仍然存在可用卫星不足4颗的情况。
4、上述高轨gnss接收机的信号条件最终反映在接收机性能上的表现是定位精度低、连续性差。
5、在较难改变信号接收功率和卫星几何构形的情况下,为了解决高轨gnss接收机定位精度低和连续性差的问题,目前最常用的办法是使用多系统联合定位的方式。多系统联合定位,指的是使用gps,北斗,glonass,伽利略等导航系统同时进行定位。这种方法能够解决在高轨条件下单系统gnss可用星数目不足四颗的情况。其存在以下两点不足:(1)需要在接收机内部集成更多针对于不同系统的接收机模块或硬件资源,增加接收机体积及重量,而针对中高轨航天器而言,卫星重量及体积是及其宝贵的资源;(2)需要依赖国外的定位系统,存在不自主可控的风险。
6、另外一种可能的方案是使用gps与ins紧组合的方式,通过惯导系统所提供的的数据,在导航解算中进行数据融合,弥补星数不足的问题。该方法使用gps与ins紧组合的方式,使用扩展卡尔曼滤波进行数据融合。在卫星数<4时,紧组合系统仍然能够正常工作,通过ins所提供的信息,能够在卫星数目较少时实现导航定位解算。但其具有如下缺点:(1)需要使用惯导系统所提供数据,增加了卫星导航模块的硬件数目与整体重量,而针对中高轨航天器而言,卫星重量及体积是及其宝贵的资源;(2)需要使用卡尔曼滤波作为数据融合方法,计算量偏大,对于星载接收机的硬件资源消耗较大,星载接收机甚至无力进行计算。
技术实现思路
1、为解决上述技术问题,本发明提供一种钟辅助下的高轨北斗接收机定位解算方法,通过伪距构建模块、钟差解算模块和时间维持模块构成时间维持环路,用于产生历元时间的优化预测值。
2、为达到上述目的,本发明采用如下技术方案:
3、一种钟辅助下的高轨北斗接收机定位解算方法,包括如下步骤:
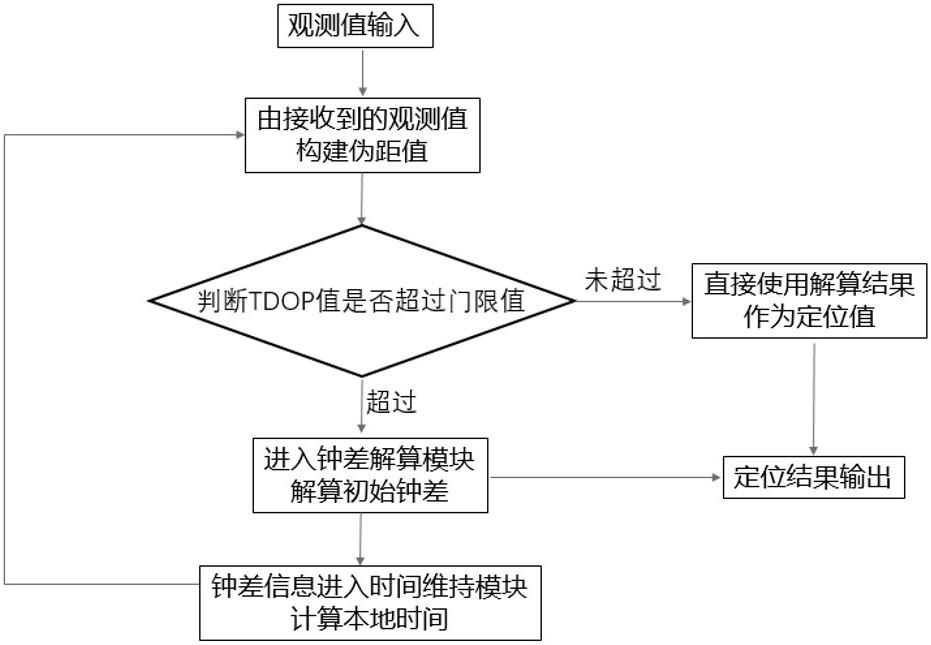
4、步骤1、通过伪距构建模块根据接收到的观测值构建伪距;
5、步骤2、判断时间精度因子值是否超过门限值,如超过门限值,则进入钟差解算模块解算初始钟差,同时输出定位结果,钟差信息进入时间维持模块计算本地时间;如未超过门限值,则直接使用解算的初始钟差作为定位值。
6、进一步地,所述步骤1包括:
7、接收机通过对测距码相位的观测获取卫星信号离开导航卫星的时间,即星上时,上标s表示导航卫星的序号;
8、接收机在第k个历元同时观测到n个导航卫星信号的发射时间构成观测值输入向量,下标k为观测历元的序号;
9、根据接收机的历元时刻和观测到的星上时构造第s颗卫星的伪距,其表达式如式(1)所示:
10、 (1)
11、其中,为光速;所观测的n颗卫星的伪距构建成伪距观测值向量。
12、进一步地,所述步骤2包括:利用所述钟差解算模块估计与导航系统真实时间之间的钟差;
13、在,并且时间精度因子值小于门限值时,通过求解方程组(2),获得钟差的估计值:
14、 (2)
15、其中,表示第s颗卫星的位置向量,上标s=1,2,……,n,该位置向量根据卫星星历和信号发射时刻计算得到;是待求的接收机位置向量;
16、当钟差解算模块输出的偏差有效时,所述时间维持模块根据钟差不断修正本地钟差和钟漂参数,维持本地时间的准确。
17、进一步地,所述时间维持模块的具体迭代过程为:
18、(3)
19、 (4)
20、其中,代表观测历元时间间隔的标称值,示是第k历元接收机钟漂的估计值;
21、其中,参数和是二阶锁相环的环路参数,由环路的阻尼系数和噪声带宽共同决定的;
22、其中,和与环路自然频率、阻尼系数的关系分别如公式(5)和公式(6)所示:
23、 (5)
24、 (6)
25、其中,和决定环路的噪声带宽,其关系如公式(7):
26、 (7)。
27、进一步地,取值为0.707,。
28、进一步地,接收机钟漂的估计值的初值设为0,或将接收机上一次运行时的接收机钟漂的估计值的收敛值作为初值;高轨北斗接收机的时间估计值的初值利用观测到的某个导航星的星上时加上一个预估的传播时延作为初始尝试值,并利用第1次解得的钟差修正得到高轨北斗接收机的时间估计值的初值的迭代初值。
29、进一步地,迭代过程中,如果某个历元可观测卫星数n<4,或者时间精度因子值大于门限值,则钟差不可用,时间维持模块按继续迭代运行,此时时间维持模块处于守时状态。
30、有益效果:
31、1)通过更新算法即可应用本发明,且该方法计算量小,能够在现有的星载接收机上实现,无需额外更新硬件设备,节省宝贵的星载资源;
32、2)在卫星数目较差时,依靠单定位系统进行定位成为可能。本发明能够实现在三颗卫星时的定位解算,增加了星载接收机的适用范围与自主可控性。
- 还没有人留言评论。精彩留言会获得点赞!