基于三维轴心位置的采集诊断系统、方法、设备以及介质与流程
本技术涉及旋转设备,尤其涉及一种基于三维轴心位置的采集诊断系统、基于三维轴心位置的采集诊断方法、旋转设备以及计算机可读存储介质。
背景技术:
1、旋转设备中的转子是主要部件,转子在轴承中高速旋转时不只围绕自身中心旋转,还环绕某一中心作涡动运动(产生涡动运动的原因可能是转子不平衡、对中不良、转子和定子碰磨、油膜涡动等),当旋转设备正常时,旋转设备轴心位置的运行轨迹近似一个圆,而当出现异常时该轴心位置的轨迹会发生畸变。因此,针对旋转设备轴心位置的轨迹进行准确的监控分析,可以得出设备故障的前期征兆和发生故障的具体原因,进而采取合理的维修措施,以防止旋转设备事故的进一步发展。因此,如何准确的计算出旋转设备的轴心位置,以基于准确的轴心位置轨迹图高效进行设备分析,是行业内亟需解决的技术问题。
技术实现思路
1、本技术的主要目的在于提供一种基于三维轴心位置的采集诊断系统、基于三维轴心位置的采集诊断方法、旋转设备以及计算机可读存储介质,旨在准确的计算出旋转设备的轴心位置,以基于准确的轴心位置轨迹图高效进行设备分析。
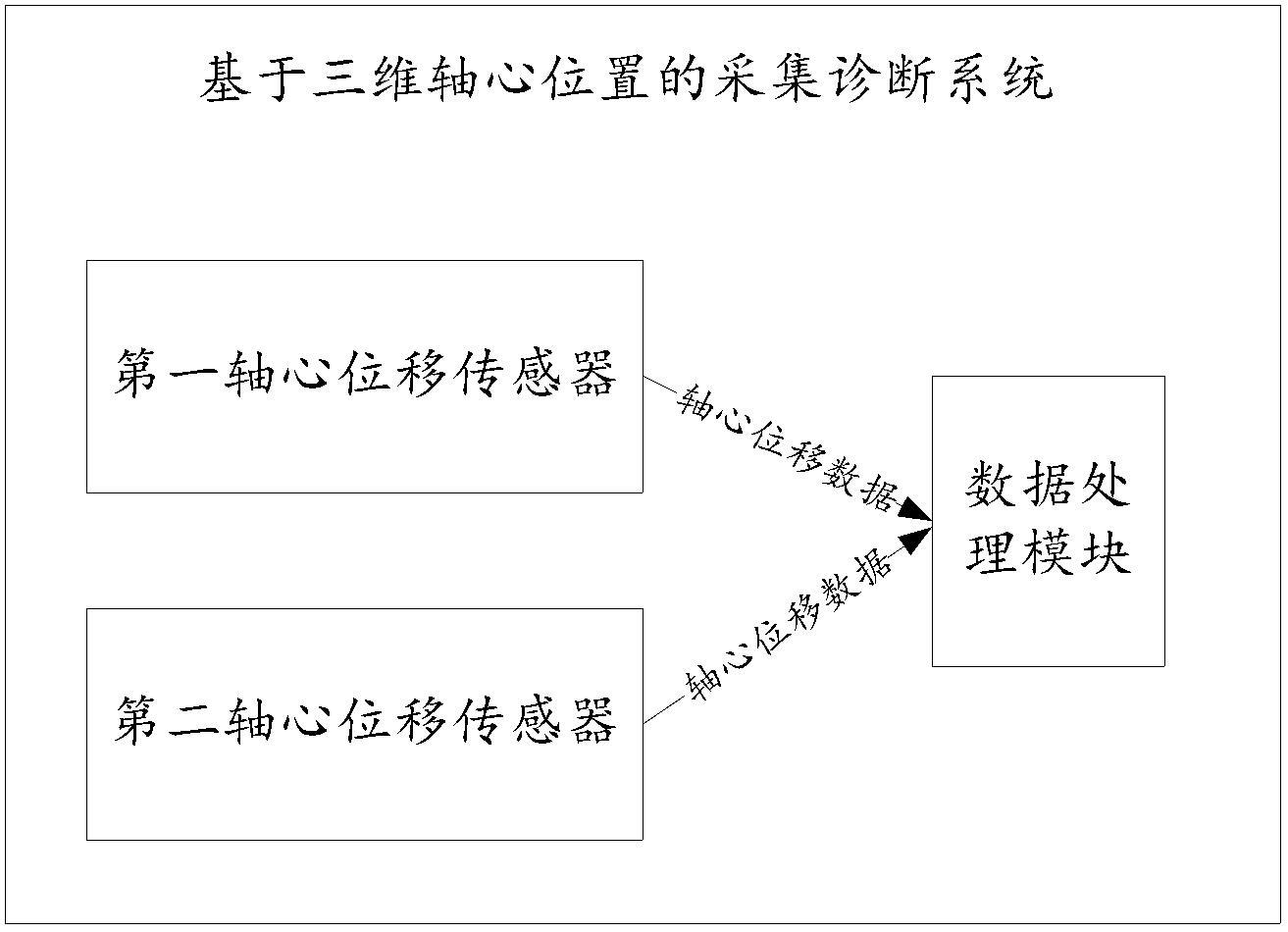
2、为实现上述目的,本技术提供一种基于三维轴心位置的采集诊断系统,所述基于三维轴心位置的采集诊断系统包括:第一轴心位移传感器、第二轴心位移传感器,和,分别与所述第一轴心位移传感器和所述第二轴心位移传感器相连接的数据处理模块;
3、所述第一轴心位移传感器的安装方向相对于旋转设备的轴承座为水平方向,所述第二轴心位移传感器的安装方向相对于所述轴承座为竖直方向;
4、所述数据处理模块根据所述第一轴心位移传感器和所述第二轴心位移传感器各自采集到的轴心位移数据进行计算以确定所述旋转设备在三维空间当中的轴心位置数据,并将所述轴心位置数据输入预设的深度神经网络模型,以基于所述深度神经网络模型实时确定所述旋转设备的运行故障诊断结果。
5、进一步地,所述数据处理模块将所述轴心位置数据输入预设的深度神经网络模型,以基于所述深度神经网络模型实时确定所述旋转设备的运行故障诊断结果,包括:
6、所述数据处理模块根据所述轴心位置数据确定所述旋转设备是否发生运行故障;并在检测到所述旋转设备发生运行故障时,将所述轴心位置数据输入预设的深度神经网络模型,以基于所述深度神经网络模型实时确定所述旋转设备的运行故障诊断结果。
7、进一步地,所述数据处理模块根据所述轴心位置数据确定所述旋转设备是否发生运行故障,包括:
8、所述数据处理模块根据所述轴心位置数据计算所述旋转设备的轴心位置运行轨迹的特征量,并检测所述轴心位置运行轨迹的所述特征量是否达到预设阈值,以在检测到所述特征量达到所述预设阈值时,确定所述旋转设备发生运行故障;
9、若所述数据处理模块检测到所述特征量未达到所述预设阈值,则确定所述旋转设备未发生运行故障。
10、进一步地,所述第一轴心位移传感器和所述第二轴心位移传感器均安装在所述轴承座上;
11、所述第一轴心位移传感器包括:安装方向为水平x方向上的第一传感器,和,安装方向为水平y方向上的第二传感器,所述水平x方向和所述水平y方向相互正交;
12、所述第二位移传感器的安装方向为竖直z方向,所述竖直z方向相交于所述水平x方向和所述水平y方向的正交点。
13、此外,为实现上述目的,本技术还提供一种基于三维轴心位置的采集诊断方法,所述基于三维轴心位置的采集诊断方法包括:
14、获取旋转设备的第一轴心位移传感器和第二轴心位移传感器各自采集到的轴心位移数据,其中,述第一轴心位移传感器的安装方向相对于所述旋转设备的轴承座为水平方向,所述第二轴心位移传感器的安装方向相对于所述轴承座为竖直方向;
15、根据所述轴心位移数据进行计算以确定所述旋转设备在三维空间当中的轴心位置数据;
16、将所述轴心位置数据输入预设的深度神经网络模型,以基于所述深度神经网络模型实时确定所述旋转设备的运行故障诊断结果。
17、进一步地,所述将所述轴心位置数据输入预设的深度神经网络模型,以基于所述深度神经网络模型实时确定所述旋转设备的运行故障诊断结果的步骤,包括:
18、根据所述轴心位置数据确定所述旋转设备是否发生运行故障;
19、在检测到所述旋转设备发生运行故障时,将所述轴心位置数据输入预设的深度神经网络模型,以基于所述深度神经网络模型实时确定所述旋转设备的运行故障诊断结果。
20、进一步地,所述根据所述轴心位置数据确定所述旋转设备是否发生运行故障的步骤,包括:
21、根据所述轴心位置数据计算所述旋转设备的轴心位置运行轨迹的特征量;
22、检测所述轴心位置运行轨迹的所述特征量是否达到预设阈值,并在检测到所述特征量达到所述预设阈值时,确定所述旋转设备发生运行故障;
23、若检测到所述特征量未达到所述预设阈值,则确定所述旋转设备未发生运行故障。
24、进一步地,所述第一轴心位移传感器和所述第二轴心位移传感器均安装在所述轴承座上;
25、所述第一轴心位移传感器包括:安装方向为水平x方向上的第一传感器,和,安装方向为水平y方向上的第二传感器,所述水平x方向和所述水平y方向相互正交;
26、所述第二位移传感器的安装方向为竖直z方向,所述竖直z方向相交于所述水平x方向和所述水平y方向的正交点。
27、此外,为实现上述目的,本技术还提供一种旋转设备,所述旋转设备集成在如上所述的基于三维轴心位置的采集诊断系统中,或者,所述旋转设备与所述采集诊断系统相连接,所述旋转设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的基于三维轴心位置的采集诊断程序,所述基于三维轴心位置的采集诊断程序被所述处理器执行时实现如上所述的基于三维轴心位置的采集诊断方法的步骤。
28、此外,为实现上述目的,本技术还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有基于三维轴心位置的采集诊断程序,所述基于三维轴心位置的采集诊断程序被处理器执行时实现如上所述的基于三维轴心位置的采集诊断方法的步骤。
29、本技术实施例提供的基于三维轴心位置的采集诊断系统、基于三维轴心位置的采集诊断方法、旋转设备以及计算机可读存储介质,该采集诊断系统包括:第一轴心位移传感器、第二轴心位移传感器,和,分别与所述第一轴心位移传感器和所述第二轴心位移传感器相连接的数据处理模块;所述第一轴心位移传感器的安装方向相对于旋转设备的轴承座为水平方向,所述第二轴心位移传感器的安装方向相对于所述轴承座为竖直方向;所述数据处理模块根据所述第一轴心位移传感器和所述第二轴心位移传感器各自采集到的轴心位移数据进行计算以确定所述旋转设备在三维空间当中的轴心位置数据,并将所述轴心位置数据输入预设的深度神经网络模型,以基于所述深度神经网络模型实时确定所述旋转设备的运行故障诊断结果。
30、在本技术实施例中,通过设置第一轴心位移传感器和第二轴心位移传感器,且令第一轴心位移传感器的安装方向相对于旋转设备的轴承座为水平方向,和令第二轴心位移传感器的安装方向相对于该轴承座为竖直方向。从而,通过数据处理模块根据该第一轴心位移传感器和该第二轴心位移传感器各自采集到的轴心位移数据进行计算,以确定该旋转设备在三维空间当中的轴心位置数据,并将该轴心位置数据输入预设的深度神经网络模型,进而基于该深度神经网络模型实时确定旋转设备的运行故障诊断结果。
31、如此,本技术实施例相比于传统仅依靠同一轴心截面来计算旋转设备轴心位置的方式,结合安装方向相对于轴承座为水平方向的第一轴心位移传感器,和,安装方向相对于该轴承座为竖直方向的第二轴心位移传感器,各自在一段时间内采集的数据进行计算,能够在极大程度上提高计算旋转设备轴心位置的准确性,从而确保基于轴心位置轨迹图进行高效地分析诊断。
32、此外,本技术实施例通过上述的第一轴心位移传感器和第二轴心位移传感器采集数据计算轴心位置,可以形成三维的轴心位置图,从而也便于分析旋转设备在水平及垂向方向的多角度轴心偏差情况。
- 还没有人留言评论。精彩留言会获得点赞!