一种用于大田作物种植环境下的农机具自动导航方法
本发明属于农业机械自动化领域,尤其涉及一种用于大田作物种植环境下的农机具自动导航方法。
背景技术:
1、近年来,随着智慧农业的不断发展,农业机器人的研究与应用日益受到关注。农业机器人自动导航广泛应用于耕种、除草、农药喷洒、收割等多种农业生产活动中,极大的提升了农业作业效率。常用的导航方式包括:激光导航、惯性导航、视觉导航及gps导航等。其中视觉导航作为一种使用视觉信息来实现导航和定位的技术,它不仅可以实现高精度、长时间的定位与导航而不会出现惯性导航的累计误差问题,而且具有成本低、智能化水平高、信息获取更丰富的特点。这些特点使视觉导航十分适合大田种植环境下农机具导航这种对实时性要求高且需要高精度、长距离的导航场景。但视觉导航无法满足农机具在田外换行时的导航需求,而gps导航作为一种精度高、技术成熟、成本不断下降的导航技术,更适合在田外引导农机具完成换行动作。
2、单一的导航方式无法很好的满足农机具的自动导航需要,gps导航采用绝对坐标导航,可以进行一定范围内的精确路径规划,而视觉导航采用相对坐标导航,对田间环境适应性更强,且实时性更好。视觉导航和gps导航作为两种优点不同的导航方式,通过二者之间的相互配合可以更好的辅助农机具完成田间自动导航工作。
3、因此,针对现有技术没有大田种植环境下农机具田内、田外连续自动导航的方案,提出了一种田间视觉导航加田外gps导航的分步导航方法,通过改进现有的田间视觉导航算法使其能更好的与田外gps导航算法结合,在保证导航线提取精度和可靠性的基础上更能适应农机具换行后特殊的导航场景。
技术实现思路
1、为解决上述技术问题,本发明提出了一种用于大田作物种植环境下的农机具自动导航方法,以解决现有技术中没有大田种植环境下农机具田内、田外连续自动导航方案的问题。
2、为实现上述目的,本发明提供了一种用于大田作物种植环境下的农机具自动导航方法,包括以下步骤:
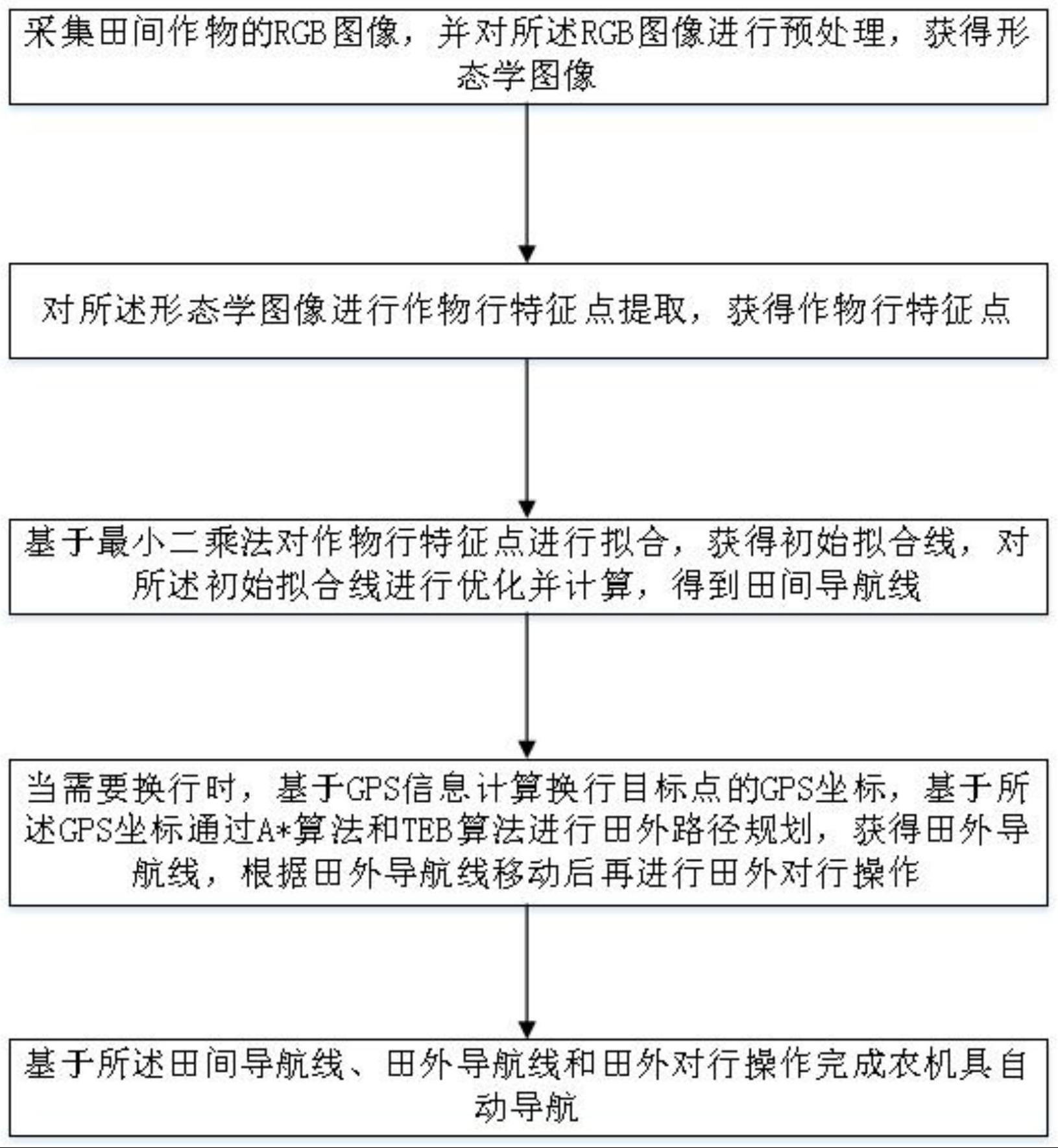
3、采集田间作物的rgb图像,并对所述rgb图像进行预处理,获得形态学图像;
4、对所述形态学图像进行作物行特征点提取,获得作物行特征点;
5、基于最小二乘法对作物行特征点进行拟合,获得初始拟合线,对所述初始拟合线进行优化并计算,得到田间导航线;
6、当需要换行时,基于gps信息计算换行目标点的gps坐标,基于所述gps坐标通过a*算法和teb算法进行田外路径规划,获得田外导航线,根据田外导航线移动后再进行田外对行操作;
7、基于所述田间导航线、田外导航线和田外对行操作完成农机具自动导航。
8、优选地,所述获得形态学图像的方法包括:采用超绿算法将rgb图像转换为灰度图像;采用最大类间方差算法确定二值化阈值,基于所述二值化阈值将灰度图像转换为二值图像;对所述二值图像进行形态学处理,得到形态学图像。
9、优选地,所述形态学处理的方法包括:先采用10×2卷积核对二值图像进行腐蚀,再通过3×3卷积核进行开运算,最后使用10×2卷积核进行膨胀。
10、优选地,所述获得作物行特征点的方法包括:将形态学图像进行等分处理,获得横向水平条带,另在图像底部取一横向水平条带,对所述横向水平条带进行垂直投影和数组化,获得数组并标号,查询图像底部所取条带对应数组内元素值连续为0的最长数据段,以最长数据段中心元素的数组序号作为导航线基准点的列坐标,以列坐标为中心向左右两侧进行作物行特征点寻找,获得作物行特征点。
11、优选地,寻找作物行特征点的方法包括:设置滑动窗口,滑动窗口宽度与横向水平条带宽度相同;以导航线基准点的列坐标为中心,向左右两侧移动滑窗;每移动一次滑窗,均计算滑窗范围内包含的数组元素之和;如果随着滑窗的移动,滑窗包含的元素值之和开始减少,则停止移动,并记录当前滑窗的中心点对应的数组编号,得到横向水平条带的作物行特征点,并取左右两个作物行特征点的中心为导航线参照点。
12、优选地,在获取其他横向水平条带的作物行特征点时,直接以上一条带获得的导航线参照点的列坐标为中心。
13、优选地,所述进行优化并计算的方法包括:比较每个特征点到初始拟合线的距离,剔除偏离特征点,并对剔除偏离特征点后的特征点集再次进行最小二乘法拟合,得到作物特征行线,通过两条作物特征行线的斜率计算导航线的斜率,基于两条作物特征行线的交点和导航线的斜率获得导航线。
14、优选地,所述计算导航线的斜率的公式为:
15、
16、式中,k代表导航线斜率,k1代表其中一条作物特征行线的斜率,k2代表另一条作物特征行线的斜率。
17、优选地,换行目标点的gps坐标的计算公式为:
18、
19、式中,(x0,y0)表示换行目标点的gps坐标,(xg,yg)表示农机具完全驶出田间后其中心的gps坐标,lp表示作物行距,θ表示农机具完全驶出田间后其正前方与地理上正北方之间的夹角。
20、优选地,田外对行时农机具横向移动距离的计算公式为:
21、
22、式中,h表示农机具横向移动距离,l′表示导航线基准点与图像中心列之间的距离,hc表示相机距离地面的高度,lt表示农机具中心到第一行作物的距离,f表示相机的焦距。
23、与现有技术相比,本发明具有如下优点和技术效果:
24、本发明所述的大田作物种植环境下的农机具自动导航方法,通过改进现有的田间视觉导航算法使其能更好的与田外gps导航算法结合,在保证导航线提取精度和可靠性的基础上更能适应农机具换行后特殊的导航场景。
技术特征:
1.一种用于大田作物种植环境下的农机具自动导航方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于大田作物种植环境下的农机具自动导航方法,其特征在于,
3.根据权利要求2所述的用于大田作物种植环境下的农机具自动导航方法,其特征在于,
4.根据权利要求1所述的用于大田作物种植环境下的农机具自动导航方法,其特征在于,
5.根据权利要求4所述的用于大田作物种植环境下的农机具自动导航方法,其特征在于,
6.根据权利要求5所述的用于大田作物种植环境下的农机具自动导航方法,其特征在于,
7.根据权利要求1所述的用于大田作物种植环境下的农机具自动导航方法,其特征在于,
8.根据权利要求7所述的用于大田作物种植环境下的农机具自动导航方法,其特征在于,
9.根据权利要求1所述的用于大田作物种植环境下的农机具自动导航方法,其特征在于,
10.根据权利要求1所述的用于大田作物种植环境下的农机具自动导航方法,其特征在于,
技术总结
本发明公开了一种用于大田作物种植环境下的农机具自动导航方法,包括以下步骤:采集田间作物的RGB图像,并对RGB图像进行预处理,获得形态学图像;对形态学图像进行作物行特征点提取,获得作物行特征点;基于最小二乘法对作物行特征点进行拟合,获得初始拟合线,对初始拟合线进行优化并计算,得到田间导航线;当需要换行时,基于GPS坐标通过A*算法和TEB算法进行田外路径规划,获得田外导航线并进行田外对行操作;基于田间导航线、田外导航线和田外对行操作完成农机具自动导航。本方法通过改进现有的田间视觉导航算法能更好的与田外GPS导航算法结合,在保证导航线提取精度和可靠性的基础上更能适应农机具换行后特殊的导航场景。
技术研发人员:袁洪波,吴少聪,程曼
受保护的技术使用者:河北农业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!